
 E-mail Alert
E-mail Alert RSS
RSS
Unsupervised light field depth estimation based on sub-light field occlusion fusion
-
摘要
光场深度估计是光场处理和应用领域的重要科学问题。然而,现有研究忽略了光场视图间的几何遮挡关系。本文通过对不同视图间遮挡的分析,提出了一种基于子光场遮挡融合的无监督光场深度估计方法。该方法首先采用一种有效的子光场划分机制来考虑不同角度位置处的深度关系,具体是将光场子孔径阵列的主副对角线上的视图按左上、右上、左下、右下分为四个子光场。然后,利用空间金字塔池化特征提取和U-Net网络来估计子光场深度。最后,设计了一种遮挡融合策略来融合所有子光场深度以得到最终深度,该策略对在遮挡区域具有更高精度的子光场深度图赋予更大的权重,从而减小遮挡影响。此外,引入了加权空间一致性损失和角度一致性损失以约束网络训练并增强鲁棒性。实验结果表明,所提出方法在定量指标和定性比较上展现出了良好的性能。
Abstract
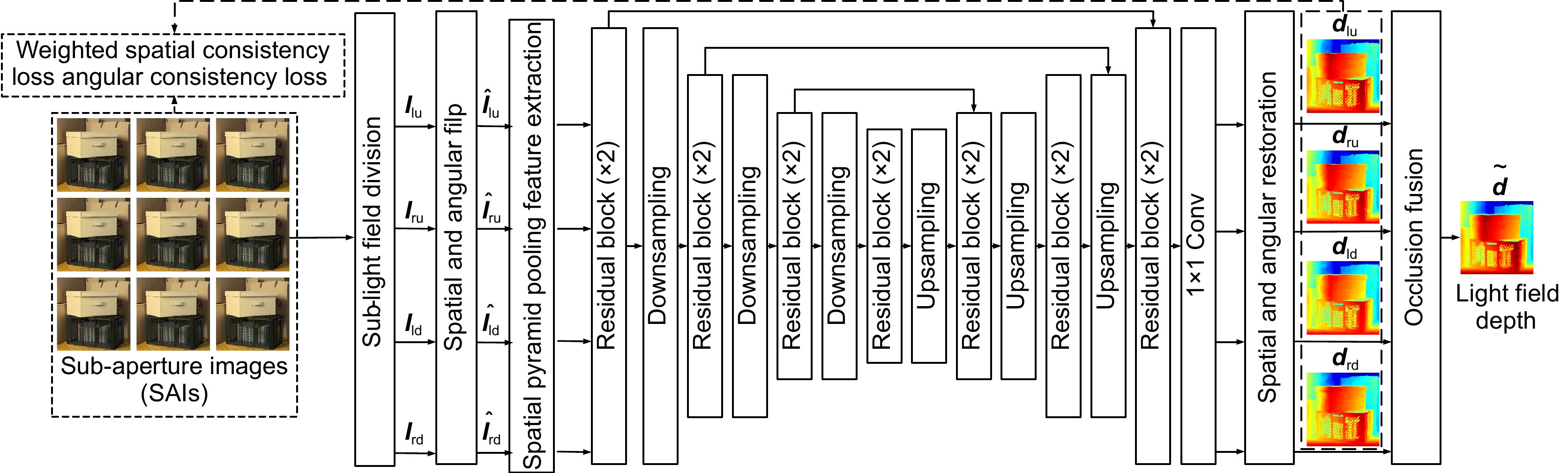
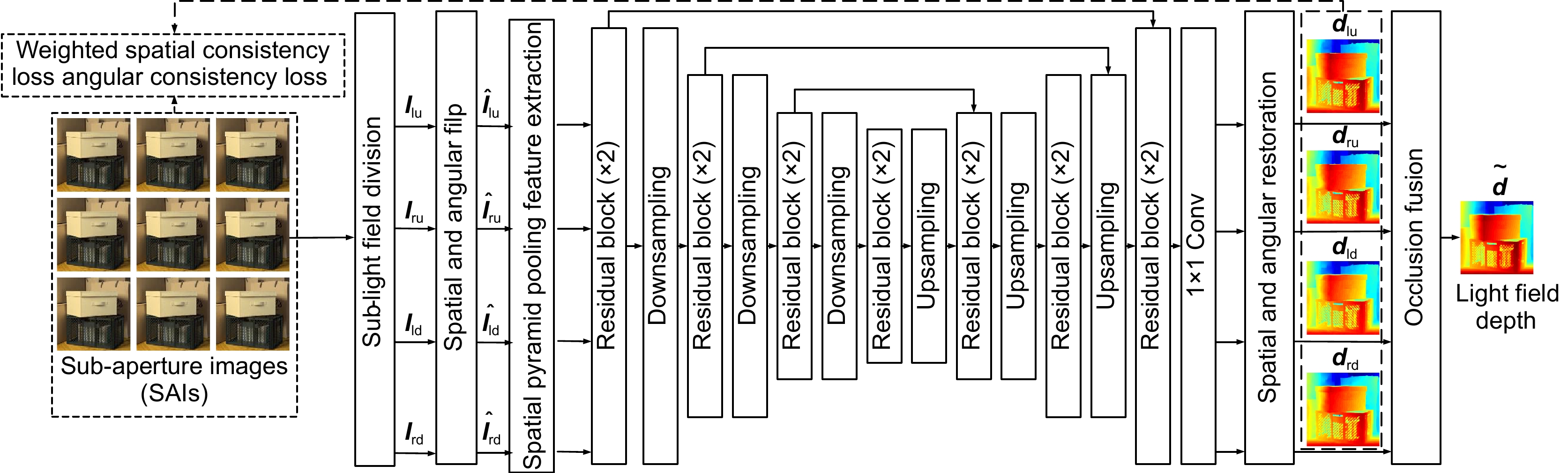
Light field depth estimation is an important scientific problem of light field processing and applications. However, the existing studies ignore the geometric occlusion relationship among views in the light field. By analyzing the occlusion among different views, an unsupervised light field depth estimation method based on sub-light field occlusion fusion is proposed. The proposed method first adopts an effective sub-light field division mechanism to consider the depth relationship at different angular positions. Specifically, the views on the primary and secondary diagonals of the light field sub-aperture arrays are divided into four sub-light fields, i.e., top-left, top-right, bottom-left, and bottom-right. Then, a spatial pyramid pooling feature extraction and a U-Net network are leveraged to estimate the depths of the sub-light fields. Finally, an occlusion fusion strategy is designed to fuse all sub-light field depths to obtain the final depth. This strategy assigns greater weights to the sub-light field depth with higher accuracy in the occlusion region, thus reducing the occlusion effect. In addition, a weighted spatial and an angular consistency loss are employed to constrain network training and enhance robustness. Experimental results demonstrate that the proposed method exhibits favorable performance in both quantitative metrics and qualitative comparisons.
-
Key words:
- light field /
- depth estimation /
- unsupervised /
- sub-light field division /
- occlusion fusion
-
Overview
Overview: Light is an important medium for humans to observe and perceive the real world, while traditional imaging approaches only record limited light information. Light field imaging can simultaneously acquire the intensity and direction information of light rays, thereby enabling a more accurate perception of complex dynamic environments. Currently, it has been applied to many visual tasks such as 3D scene reconstruction, digital refocusing, view synthesis, and occlusion removal. It is regarded as one of the main technologies for immersive media. Light field depth estimation is an important scientific problem of light field processing and applications. In recent years, deep learning has shown strong nonlinear fitting capabilities and achieved favorable results in light field depth estimation, but the generalization capability of supervised methods in real-world scenes is limited. Besides, the existing studies ignore the geometric occlusion relationship among views in the light field. By analyzing the occlusion issue among different views, an unsupervised light field depth estimation method based on sub-light field occlusion fusion is proposed. Firstly, an effective sub-light field division mechanism is employed to consider the depth relationship at different angular positions. Specifically, the view on the primary and secondary diagonals of the light field sub-aperture array are divided into four sub-light fields, i.e., top-left, top-right, bottom-left, and bottom-right. Secondly, a spatial pyramid pooling is leveraged for feature extraction to capture multi-scale context information, along with a U-Net network to estimate the depths of the sub-light fields. Finally, an occlusion fusion strategy is designed to fuse all sub-light field depths to obtain the final depth, which assigns greater weights to the sub-light field depth map with higher accuracy in the occlusion region, so as to reduce the occlusion effect. In addition, a weighted spatial and an angular consistency loss are used to constrain network training and enhance robustness. Extensive experimental results on the benchmark datasets show that the proposed method outperforms the existing methods in both quantitative and qualitative comparison. In particular, the proposed method exhibits favorable performance on real-world datasets established with light field cameras. Moreover, detailed ablation studies validate the effectiveness of sub-light field division, occlusion fusion, and loss functions involved in the proposed method.
-

-
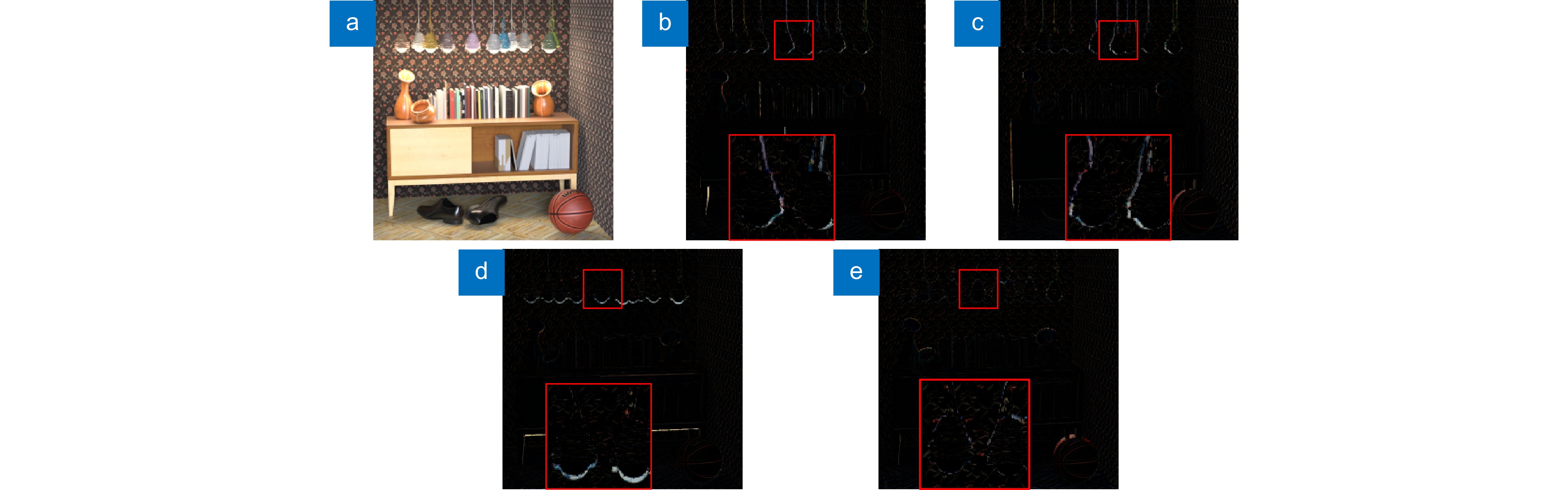
图 1 中心视图与左、右、上、下视图绘制误差示例。 (a)中心视图;(b)左视图绘制误差;(c)右视图绘制误差;(d)上视图绘制误差;(e)下视图绘制误差
Figure 1. Illustrations of center view and warping errors of left, right, top, and bottom views. (a) Center view; (b) Warping error of left view; (c) Warping error of right view; (d) Warping error of top view; (e) Warping error of bottom view
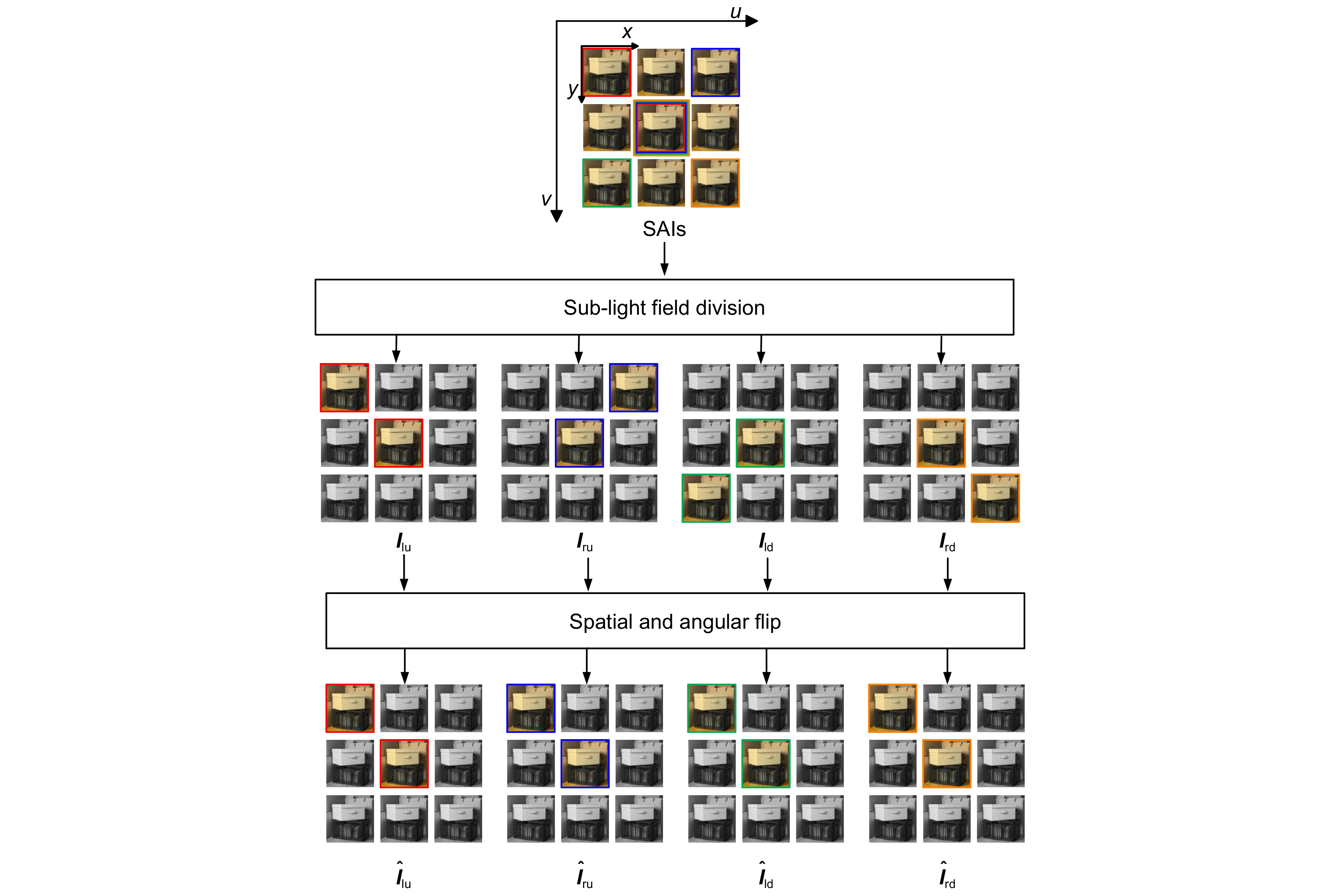
图 2 子光场划分和空间角度翻转,以3×3为示例
Figure 2. Sub-light field division and spatial and angular flip ( 3×3 as an example)
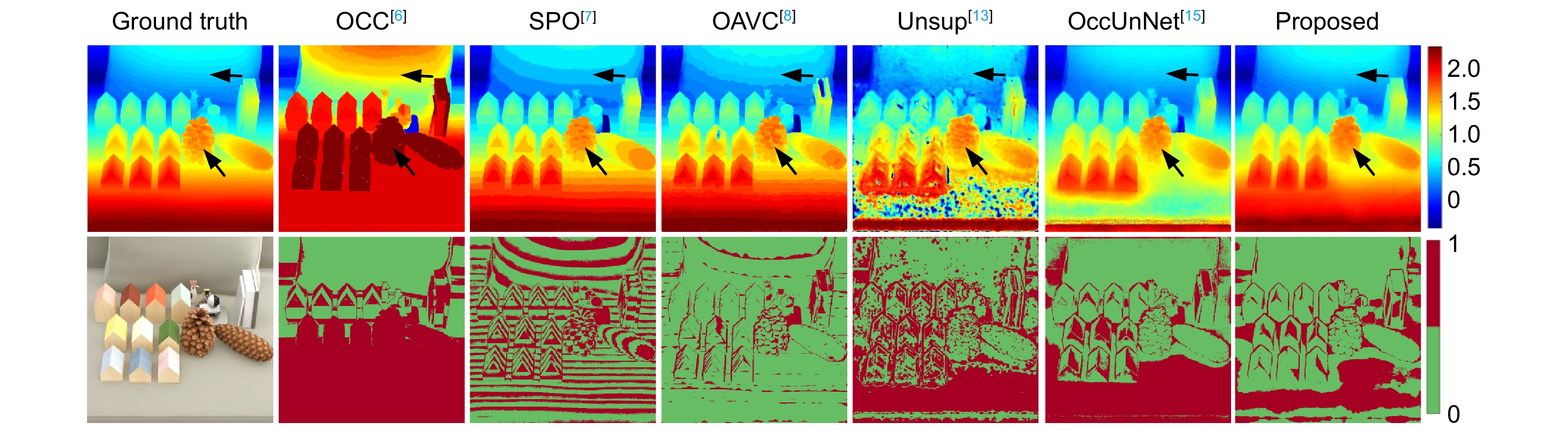
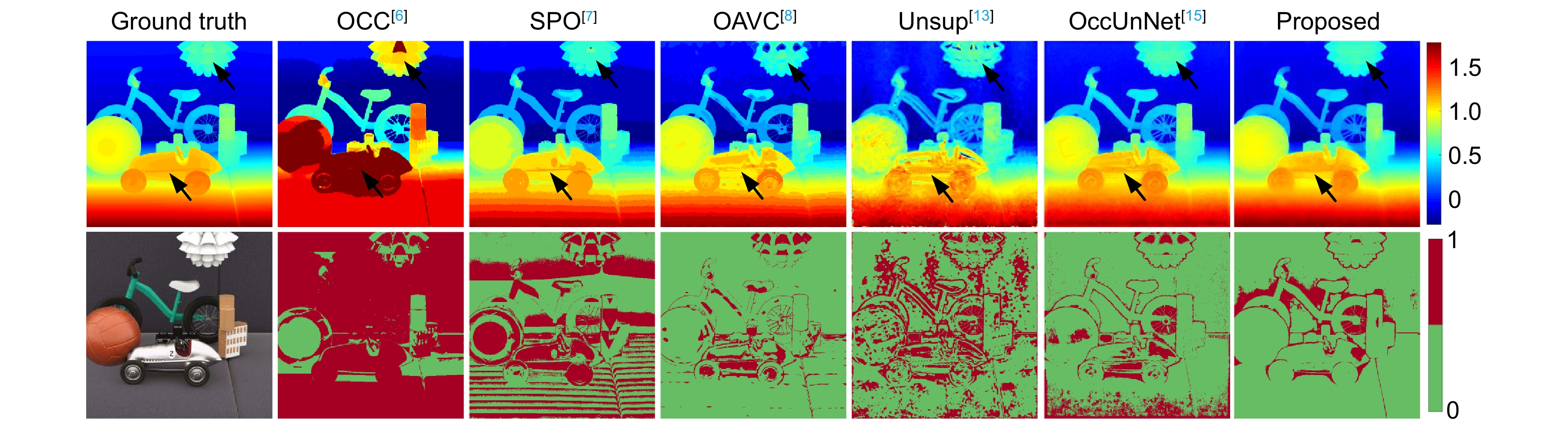
表 1 所提出方法与其他光场深度估计方法在MSE(×100)指标上的定量比较(加粗表示第一,下划线表示第二)
Table 1. Quantitative comparison of different light field depth estimation methods in terms of MSE (×100) (bolded indicates first, underlined indicates second)
Type Methods Boxes Cotton Pyramids Sideboard Antiques Pinenuts Smiling Toys Ave. Tradi-
tionalOCC [6] 12.22 9.47 1.81 18.76 38.76 46.95 237.26 10.49 46.97 SPO [7] 9.57 1.99 0.20 1.34 3.00 1.32 6.53 0.90 3.11 OAVC [8] 7.46 1.47 0.08 1.55 5.38 1.62 4.77 1.02 2.92 Unsup-
ervisedUnsup [13] 12.21 7.37 0.43 3.82 11.87 30.69 17.68 2.38 10.81 OccUnNet [15] 6.94 1.68 0.17 7.54 3.23 19.04 4.93 0.70 5.53 Proposed 6.61 2.22 0.04 2.07 4.10 0.70 4.80 0.67 2.65  下载: 导出CSV
下载: 导出CSV
表 2 所提出方法与其他光场深度估计方法在BPR(>0.07)指标上的定量比较(加粗表示第一,下划线表示第二)
Table 2. Quantitative comparison of different light field depth estimation methods in terms of BPR (>0.07) (bolded indicates first, underlined indicates second)
Type Methods Boxes Cotton Pyramids Sideboard Antiques Pinenuts Smiling Toys Ave. Tradi-
tionalOCC [6] 40.05 46.39 12.17 48.81 72.53 62.81 71.03 83.33 54.64 SPO [7] 42.58 29.79 14.87 32.32 31.63 40.07 18.93 41.51 31.46 OAVC [8] 18.59 5.19 2.91 19.59 6.71 11.40 23.13 10.17 12.21 Unsup-
ervisedUnsup [13] 43.75 23.97 14.75 26.37 33.43 48.94 42.45 29.50 32.90 OccUnNet [15] 27.39 7.03 6.41 17.50 17.57 43.58 21.77 16.52 19.72 Proposed 24.70 6.39 0.78 16.26 9.32 29.95 15.63 10.64 14.21
下载: 导出CSV
表 3 所提出方法与其他光场深度估计方法在运行时间(s)指标上的定量比较,传统方法在CPU上运行,无监督方法在GPU上运行(加粗表示第一,下划线表示第二)
Table 3. Quantitative comparison of different light field depth estimation methods in terms of runtime (s), where traditional methods run on CPU and unsupervised methods run on GPU (bolded indicates first, underlined indicates second)
Type Methods Boxes Cotton Pyramids Sideboard Antiques Pinenuts Smiling Toys Ave. Tradi-
tionalOCC [6] 192.05 210.73 319.46 222.10 205.32 172.03 242.53 166.85 216.38 SPO [7] 831.91 820.72 790.02 814.70 794.63 807.51 803.15 807.74 808.80 OAVC [8] 16.33 16.60 16.50 16.47 16.62 16.74 16.62 16.72 16.58 Unsup-
ervisedUnsup [13] 39.38 39.14 39.55 39.49 39.72 39.47 39.21 38.38 39.29 OccUnNet [15] 0.24 0.24 0.24 0.24 0.24 0.24 0.24 0.24 0.24 Proposed 0.01 0.01 0.01 0.02 0.01 0.01 0.01 0.01 0.01
下载: 导出CSV
表 4 消融实验结果
Table 4. Results of ablation experiment
Schemes MSE(×100) BPR(>0.07) Scheme 1 5.85 15.23 Scheme 2 2.74 17.34 Scheme 3 3.04 20.52 Scheme 4 3.54 20.88 Scheme 5 3.74 18.16 Scheme 6 4.02 18.98 Scheme 7 2.89 21.60 Scheme 8 2.75 16.24 Scheme 9 2.89 18.32 Proposed 2.65 14.21
下载: 导出CSV
-
参考文献
[1] Rabia S, Allain G, Tremblay R, et al. Orthoscopic elemental image synthesis for 3D light field display using lens design software and real-world captured neural radiance field[J]. Opt Express, 2024, 32(5): 7800−7815. doi: 10.1364/OE.510579
[2] Charatan D, Li S L, Tagliasacchi A, et al. pixelSplat: 3D gaussian splats from image pairs for scalable generalizable 3d reconstruction[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Piscataway, 2024: 19457–19467.
[3] 李玉龙, 陈晔曜, 崔跃利, 等. LF-UMTI: 基于多尺度空角交互的无监督多曝光光场图像融合[J]. 光电工程, 2024, 51(6): 240093. doi: 10.12086/oee.2024.240093
Li Y L, Chen Y Y, Cui Y L, et al. LF-UMTI: unsupervised multi-exposure light field image fusion based on multi-scale spatial-angular interaction[J]. Opto-Electron Eng, 2024, 51(6): 240093. doi: 10.12086/oee.2024.240093
[4] 吕天琪, 武迎春, 赵贤凌. 角度差异强化的光场图像超分网络[J]. 光电工程, 2023, 50(2): 220185. doi: 10.12086/oee.2023.220185
Lv T Q, Wu Y C, Zhao X L. Light field image super-resolution network based on angular difference enhancement[J]. Opto-Electron Eng, 2023, 50(2): 220185. doi: 10.12086/oee.2023.220185
[5] Jeon H G, Park J, Choe G, et al. Accurate depth map estimation from a lenslet light field camera[C]//Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, 2015: 1547–1555. https://doi.org/10.1109/CVPR.2015.7298762.
[6] Wang T C, Efros A A, Ramamoorthi R. Occlusion-aware depth estimation using light-field cameras[C]//Proceedings of the 2015 IEEE International Conference on Computer Vision, Santiago, 2015: 3487–3495. https://doi.org/10.1109/ICCV.2015.398.
[7] Zhang S, Sheng H, Li C, et al. Robust depth estimation for light field via spinning parallelogram operator[J]. Comput Vis Image Underst, 2016, 145: 148−159. doi: 10.1016/j.cviu.2015.12.007
[8] Han K, Xiang W, Wang E, et al. A novel occlusion-aware vote cost for light field depth estimation[J]. IEEE Trans Pattern Anal Mach Intell, 2022, 44(11): 8022−8035. doi: 10.1109/TPAMI.2021.3105523
[9] Tsai Y J, Liu Y L, Ouhyoung M, et al. Attention-based view selection networks for light-field disparity estimation[C]// Proceedings of the 34th AAAI Conference on Artificial Intelligence, New York, 2020: 12095–12103. https://doi.org/10.1609/aaai.v34i07.6888.
[10] Wang Y Q, Wang L G, Liang Z Y, et al. Occlusion-aware cost constructor for light field depth estimation[C]//Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, 2022: 19777–19786. https://doi.org/10.1109/CVPR52688.2022.01919.
[11] Chao W T, Wang X C, Wang Y Q, et al. Learning sub-pixel disparity distribution for light field depth estimation[J]. IEEE Trans Comput Imaging, 2023, 9: 1126−1138. doi: 10.1109/TCI.2023.3336184
[12] Srinivasan P P, Wang T Z, Sreelal A, et al. Learning to synthesize a 4D RGBD light field from a single image[C]//Proceedings of the 2017 IEEE International Conference on Computer Vision, Venice, 2017: 2262–2270. https://doi.org/10.1109/ICCV.2017.246.
[13] Peng J Y, Xiong Z W, Wang Y C, et al. Zero-shot depth estimation from light field using a convolutional neural network[J]. IEEE Trans Comput Imaging, 2020, 6: 682−696. doi: 10.1109/TCI.2020.2967148
[14] Zhou W H, Zhou E C, Liu G M, et al. Unsupervised monocular depth estimation from light field image[J]. IEEE Trans Image Process, 2020, 29: 1606−1617. doi: 10.1109/TIP.2019.2944343
[15] Jin J, Hou J H. Occlusion-aware unsupervised learning of depth from 4-D light fields[J]. IEEE Trans Image Process, 2022, 31: 2216−2228. doi: 10.1109/TIP.2022.3154288
[16] Zhang S S, Meng N, Lam E Y. Unsupervised light field depth estimation via multi-view feature matching with occlusion prediction[J]. IEEE Trans Circuits Syst Video Technol, 2024, 34(4): 2261−2273. doi: 10.1109/TCSVT.2023.3305978
[17] Godard C, Aodha O M, Brostow G J. Unsupervised monocular depth estimation with left-right consistency[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, 2017: 6602–6611. https://doi.org/10.1109/CVPR.2017.699.
[18] He K M, Zhang X Y, Ren S Q, et al. Deep residual learning for image recognition[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, 2016: 770–778. https://doi.org/10.1109/CVPR.2016.90.
[19] Honauer K, Johannsen O, Kondermann D, et al. A dataset and evaluation methodology for depth estimation on 4D light fields[C]//Proceedings of the 13th Asian Conference on Computer Vision, Taipei, China, 2016: 19–34. https://doi.org/10.1007/978-3-319-54187-7_2.
[20] Shi J L, Jiang X R, Guillemot C. A framework for learning depth from a flexible subset of dense and sparse light field views[J]. IEEE Trans Image Process, 2019, 28(12): 5867−5880. doi: 10.1109/TIP.2019.2923323
[21] Blender website[EB/OL]. [2024-09-01]. https://www.blender.org/.
[22] Rerabek M, Ebrahimi T. New light field image dataset[C]//Proceedings of the 8th International Conference on Quality of Multimedia Experience, Lisbon, 2016: 1–2.
[23] Raj A S, Lowney M, Shah R, et al. Stanford lytro light field archive[EB/OL]. [2024-07]. http://lightfields.stanford.edu/LF2016.html.
-
访问统计

 点击扫一扫
点击扫一扫
图(10)
表(4)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


