
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
现代科技中,激光雷达在自动导航、工业测绘等领域扮演关键角色,但传统相位测距系统普遍存在测量精度低和结构复杂等问题。本文提出了一种新型的高精度相位式激光雷达测距系统。该系统采用激光控制同频参比的相位差检测方法,包括对激光发射和接收模块的光学结构优化,以及对接收电路的放大滤波与差分混频处理,最终制作出了一个基于AD8302的高分辨率鉴相系统。实验结果显示,该系统测量精度为毫米级别,简便实用且能满足广泛的实际应用需求。这一研究为激光雷达技术在高精度距离测量方面提供了可行的解决方案。
Abstract:In modern science and technology, LiDAR plays a key role in automatic navigation, industrial mapping and other fields, but the traditional phase ranging system has many problems such as low measurement accuracy and complex structure. A new high-precision phase laser radar ranging system is proposed in this paper. The system adopts the phase difference detection method of laser control with the same frequency reference, including the optical structure optimization of the laser transmitting and receiving modules, and the amplification filtering and differential mixing processing of the receiving circuit, and finally produces a high-resolution phase discrimination system based on AD8302. The experimental results show that the measurement accuracy of the system is millimeter level, which is simple and practical and can meet the needs of a wide range of practical applications. This research provides a feasible solution for LiDAR technology in high-precision distance measurement.
-
Key words:
- LiDAR /
- phase /
- precision /
- phase discrimination
-
Overview: With the advent of the intelligent era, laser ranging is widely used in remote sensing, and the development and research of radar technology has been attached to great importance in the world. Phase ranging is one of the most favourite ranging ways at present, and the phase LiDAR ranging technology has a wide application prospect in modern science and technology, especially in the fields of automatic driving, robot navigation, three-dimensional mapping and so on. Compared with traditional ranging methods, phase LiDAR ranging technology can achieve higher accuracy and resolution. However, despite significant progress in phase LiDAR ranging technology, there are still some not solved troubles. For example, the measurement accuracy and performance stability problems in complex environments, and the cost of high-precision phase ranging systems is usually higher, which restricts its widespread application in certain fields. The objective of this study is to design and develop a high-precision phase LiDAR ranging system. To improve the measurement accuracy and stability of phase ranging and reduce the cost of the laser ranging system. Firstly, Based on the principle of phase laser ranging, the transmitting and receiving parts of the optical system are designed and selected to ensure the stable transmission and reception of the laser. Then the receiver circuit of the hardware system is processed with signal amplification, filtering and mixing structure. In the case of large high-frequency phase discrimination errors, the method of mixed-frequency phase identification is used to improve the accuracy of the system. Finally, The AD8302 module is used as a foundation to improve the measurement accuracy of the system, simplify the hardware design of the system, and reduce the need for traditional complex signal processing algorithms. At the same instant, the technology of multi-ruler joint measurement is adopted. The high precision advantage of high frequency is used to improve the accuracy of the measured distance, and the wide range advantage of low frequency is used to expand the range of the measured distance to meet the long-distance requirements of high precision. Through the performance evaluation of the system, the system meets the design requirements. The experimental result manifests that the measurement system not only has high measurement accuracy and strong stability, but also reduces the complexity and cost of the system and meets the practical application requirements.
-

-
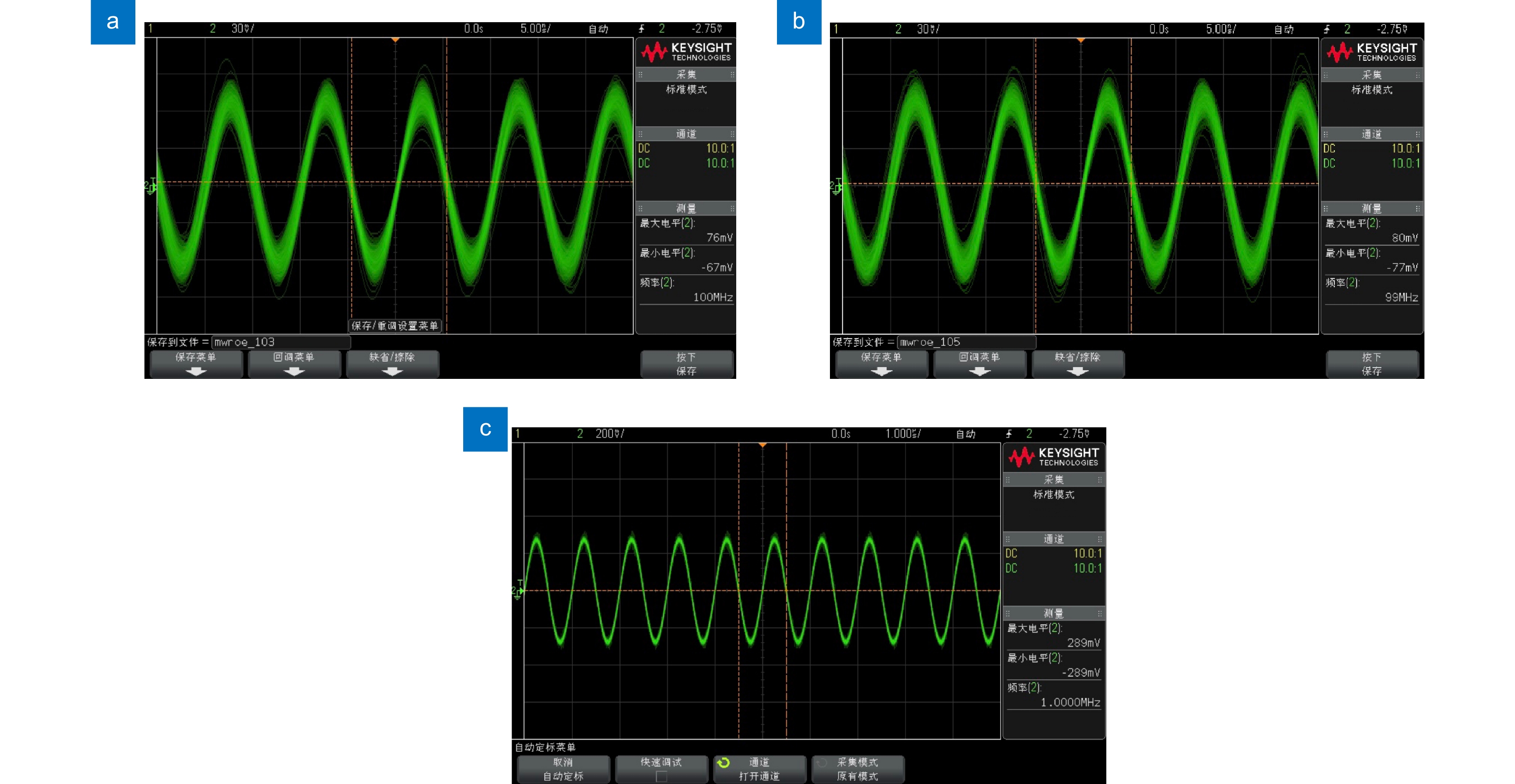
图 8 示波器中采集的系统中关键信号。(a)主振信号;(b)本振信号;(c)差频回波信号
Figure 8. Key signals in the system collected from the oscilloscope. (a) Main oscillator signal ; (b) Local oscillator signal; (c) Differential frequency echo signal
表 1 国外主要测距仪器参数列表
Table 1. List of main distance measuring instrument parameters abroad
外观图 


生产厂家 Velodyne LiDAR Leica ScanStation Luminar Technologies 所在国 美国 瑞士 美国 仪器型号 HDL-64E Leica ScanStation C10 Luminar Iris 测距方式 相位式 相位式 相位式 激光波段/nm 700~1550 700~1550 1550 激光等级 Class 1 Class 3 Class 1 测程/m 100~200 134~300 250~500 扫描速度/(103points/second) 700~1400 50 122 距离不确定度(k=2) <1 mm@25 m <2.5 mm@15 m <3 cm@280 m  下载: 导出CSV
下载: 导出CSV
表 2 测尺长度和测尺精度表
Table 2. Scale length and accuracy table
频率 长度/m 精确度/m 100 Hz 1.5 0.001 10 Hz 15 0.01 1 Hz 150 0.1 100 kHz 1500 1 10 kHz 15000 10
下载: 导出CSV
表 3 25 ℃下HSLD650-5的光电特性
Table 3. Photoelectric characteristics of HSLD650-5 at 25 ℃
性能参数 符号 工作条件 最小值 最大值 单位 峰值波长 λp Po=10 mW - - nm 阈值电流 Ith - - 30 mA 工作电流 Iop Po=10 mW - 40 mA 工作电压 Vop Po=10 mW - 2.5 V PD监控电流 Im Po=10 mW,VRD=5 V 0.05 0.3 mA 平行发散角 θ∥ Po=10 mW 6 10 deg 垂直发散角 θ⊥ Po=10 mW 30 36 deg
下载: 导出CSV
表 4 0.3 m到3 m内的测量结果
Table 4. Measurement results within 0.3 m to 3 m
标准值/m 测量均值/m 测量误差/mm 标准差/mm 0.300 0.301 1.000 0.690 0.600 0.602 2.000 0.678 0.900 0.901 1.000 0.734 1.200 1.202 2.000 0.670 1.500 1.503 3.000 0.722 1.800 1.802 2.000 0.740 2.100 2.102 2.000 0.664 2.400 2.403 3.000 0.680 2.700 2.703 3.000 0.696 3.000 3.004 4.000 0.682
下载: 导出CSV
表 5 3 m到100 m内的测量结果
Table 5. Measurement results within 3 m to 100 m
标准值/m 测量均值/m 测量误差/mm 标准差/mm 3.000 3.004 4.000 0.682 13.000 13.004 4.000 0.693 23.000 23.005 5.000 0.684 33.000 33.006 6.000 0.658 43.000 43.009 9.000 0.747 53.000 53.007 7.000 0.772 63.000 63.009 9.000 0.733 73.000 73.009 9.000 0.668 83.000 83.010 10.000 0.692 93.000 93.008 8.000 0.616 100.000 99.990 10.000 0.720
下载: 导出CSV
-
[1] Killinger D K, Menyuk N. Laser remote sensing of the atmosphere[J]. Science, 1987, 235(4784): 37−45. doi: 10.1126/science.235.4784.37
[2] Tsai B M, Gardner C S. Remote sensing of sea state using laser altimeters[J]. Appl Opt, 1982, 21(21): 3932−3940. doi: 10.1364/AO.21.003932
[3] Moeller C, Schmidt H C, Koch P, et al. Real time pose control of an industrial robotic system for machining of large scale components in aerospace industry using laser tracker system[J]. SAE Int J Aerosp, 2017, 10(2): 100−108. doi: 10.4271/2017-01-2165
[4] Jung J, Yoon S, Ju S, et al. Development of kinematic 3D laser scanning system for indoor mapping and as-built BIM using constrained SLAM[J]. Sensors, 2015, 15(10): 26430−26456. doi: 10.3390/s151026430
[5] Kim J, Cho H, Kim S. Positioning and driving control of fork-type automatic guided vehicle with laser navigation[J]. Int J Fuzzy Logic Intell Syst, 2013, 13(4): 307−314. doi: 10.5391/IJFIS.2013.13.4.307
[6] Bergstrand E. The geodimeter system: a short discussion of its principal function and future development[J]. J Geophys Res, 1960, 65(2): 404−409. doi: 10.1029/JZ065i002p00404
[7] Wyant J C. Testing aspherics using two-wavelength holography[J]. Appl Opt, 1971, 10(9): 2113−2118. doi: 10.1364/AO.10.002113
[8] De Groot P, Kishner S. Synthetic wavelength stabilization for two-color laser-diode interferometry[J]. Appl Opt, 1991, 30(28): 4026−4033. doi: 10.1364/AO.30.004026
[9] Desai V D, Ferrario J L, Bentley J L, et al. Portable laser range finder and digital compass assembly: 5, 831, 718[P]. 1998-11-03.
[10] Seidel R W. From glow to flow: a history of military laser research and development[J]. Hist Stud Phys Biol Sci, 1987, 18(1): 111−147. doi: 10.2307/27757598
[11] 王选钢. 高速高精度相位式激光测量关键技术研究[D]. 北京: 中国科学院研究生院, 2012.
Wang X G. Research on Key Technologies of high-speed and high-precision phase-shift laser rangefinder[D]. Beijing: Graduate School of the Chinese Academy of Sciences, 2012.
[12] 杨宏兴. 基于同步可调谐测尺方法的相位式激光测距技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
Yang H X. Phase shift laser rngge finding based on synchronous tunable measuring wavelength[D]. Harbin: Harbin Institute of Technology, 2012.
[13] 贾方秀. 多频调制的相位法激光测距中若干关键技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2010. https://doi.org/10.7666/d.D269457.
Jia F X. Research on key technologies of phase-shift laser range finder with multi-frequency modulation[D]. Harbin: Harbin Institute of Technology, 2010. https://doi.org/10.7666/d.D269457.
[14] McManamon P. Field Guide to Lidar[M]. Washington: Society of Photo-Optical Instrumentation Engineers (SPIE), 2015. https://doi.org/10.1117/3.2186106.
[15] Huang J, Dong B Q. The research of phase method of laser ranging measurement system[J]. Adv Mater Res, 2012, 479–481: 632–635. https://doi.org/10.4028/www.scientific.net/AMR.479-481.632.
[16] Zhang C, Huang H. Design and experiment of phase laser ranging system based on MEMS mirror for scanning detection[J]. Key Eng Mater, 2015, 645–646: 1099–1104. https://doi.org/10.4028/www.scientific.net/KEM.645-646.1099.
[17] 傅勤毅, 周遵梅, 金鼎沸, 等. 三角波调制在激光测距中的应用研究[J]. 中国激光, 2020, 47(3): 0304006. doi: 10.3788/CJL202047.0304006
Fu Q Y, Zhou Z M, Jin D F, et al. Triangular-wave modulation in a laser ranging system[J]. Chin J Lasers, 2020, 47(3): 0304006. doi: 10.3788/CJL202047.0304006
[18] Dorsch R G, Häusler G, Herrmann J M. Laser triangulation: fundamental uncertainty in distance measurement[J]. Appl Opt, 1994, 33(7): 1306−1314. doi: 10.1364/AO.33.001306
[19] Liu Y. The application and optimization of phase method in laser distance measurement[J]. J Phys Conf Ser, 2021, 1881: 022002. doi: 10.1088/1742-6596/1881/2/022002
[20] Kikuta H, Iwata K, Nagata R. Distance measurement by the wavelength shift of laser diode light[J]. Appl Opt, 1986, 25(17): 2976−2980. doi: 10.1364/AO.25.002976
[21] Lee W L, Wu K C, Jiang J Y, et al. A laser ranging radar transceiver with modulated evaluation clock in 65 nm CMOS technology[C]//2011 Symposium on VLSI Circuits-Digest of Technical Papers, 2011: 286–287.
[22] Zhou L S, He H Y, Sun J F, et al. Phase-shift laser ranging technology based on multi-frequency carrier phase modulation[J]. Photonics, 2022, 9(9): 603. doi: 10.3390/photonics9090603
[23] Poujouly S, Journet B, Placko D. Digital laser range finder: phase-shift estimation by undersampling technique[C]//25th Annual Conference of the IEEE Industrial Electronics Society, 1999, 3: 1312–1317. https://doi.org/10.1109/IECON.1999.819401.
[24] Sun X B, Tan J J, Xu J, et al. Research on key technology for phase-shift laser range finder[C]//2013 IEEE 11th International Conference on Dependable, Autonomic and Secure Computing, 2013: 235–237. https://doi.org/10.1109/DASC.2013.68.
[25] You T, Li P J, Tong G J, et al. Development of acoustic emission high-speed data acquisition system[J]. Adv Mater Res, 2012, 433-440: 5666−5671. doi: 10.4028/www.scientific.net/AMR.433-440.5666
[26] Hu P C, Yu L, Mei J T, et al. Increasing the operating distance of a phase-shift laser range-finding system by using an active reflector[J]. Opt Commun, 2015, 356: 7−11. doi: 10.1016/j.optcom.2015.07.043
[27] Jia F X, Ding Z L, Yuan F. Design of intelligent receiver system for phase-shift laser range finder[J]. Proc SPIE, 2009, 7133: 71332U. doi: 10.1117/12.810485
[28] Journet B A, Poujouly S. High-resolution laser rangefinder based on a phase-shift measurement method[J]. Proc SPIE, 1998, 3520: 123−132. doi: 10.1117/12.334326
-


 点击扫一扫
点击扫一扫
图(9)
表(5)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


