
 E-mail Alert
E-mail Alert RSS
RSS
Research on control technology of single detection based on position correction in quantum optical communication
-
摘要
量子通信光学地面站光学系统中,采用精、高精跟踪两个快速控制反射镜组成单检测模式闭环。为保证系统控制精度和稳定性,控制过程中必须考虑解耦。然而在目标信噪比较低情况下,难以实现精、高精跟踪回路的准确解耦。本文提出在精跟踪、高精跟踪内部增加位置传感器,一方面采用位置传感器闭环提高内环控制对象确定性,便于参数整定,另一方面,位置传感器偏差量反映了电视脱靶量的偏差,精跟踪采用修正位置传感器偏差量进行闭环从而避免了系统解耦。本文分析了基于该方法实现的复合轴控制结构的对象特性,控制系统设计方法及鲁棒性。理论和实验结果表明:目标特性较差的情况下,特别是滞后变化较大的情况下,本文提出的方法不需要进行解耦控制,具有更好的鲁棒性、更高的精度。
Abstract
In the optical system of quantum communication optical ground station, two fast control mirrors, corresponding to precision and high-precision tracking, are used to form a single detection mode closed loop. In order to ensure the control accuracy and stability of the system, decoupling must be considered in the control process. However, when the SNR of the target is low, it is difficult to realize the accurate decoupling of precision and high-precision tracking loops. This paper proposes to add a position sensor in precision and high-precision tracking loops, respectively. On the one hand, the position sensor closed-loop is used to improve the certainty of the inner loop control object and facilitate parameter setting. On the other hand, the deviation of the position sensor reflects the deviation of the TV miss distance. The fine tracking adopts the correction of the deviation of the position sensor for closed-loop, so as to avoid system decoupling. This paper analyzes the object characteristics, control system design method, and robustness of the compound axis control structure based on this method. Theoretical and experimental results show that the proposed method has better robustness and higher accuracy without decoupling control when the target characteristics are poor, especially when the delay changes greatly.
-
Key words:
- single detection /
- position correction /
- decoupling /
- robustness
-
Overview
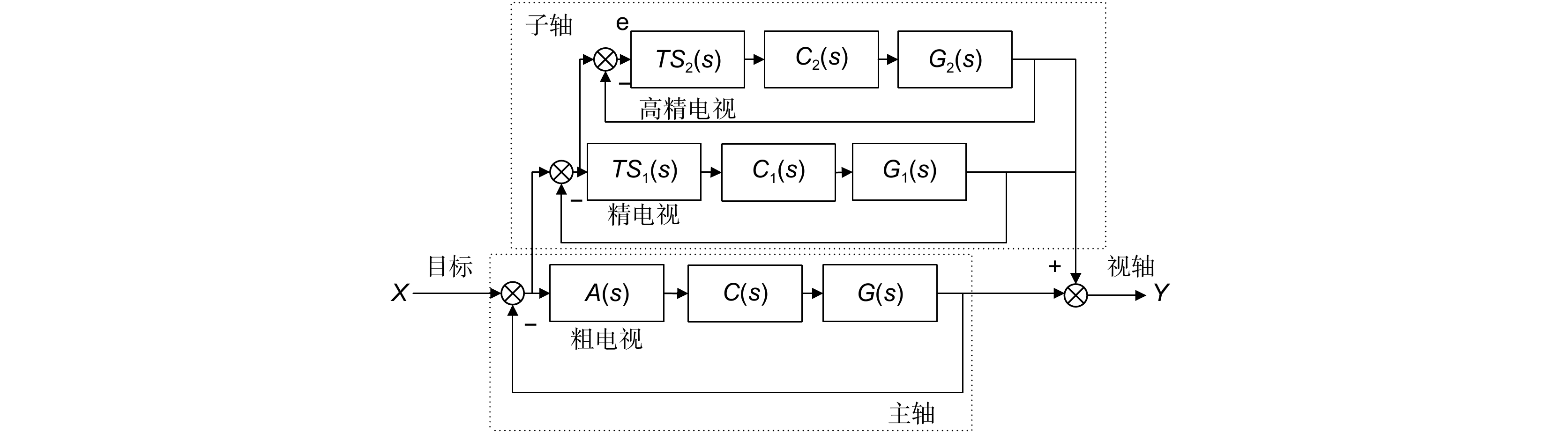
Overview: As a beam precise capture and tracking structure in quantum communication systems, ATP plays a vital role in the performance of quantum communication. In order to ensure the tracking accuracy and tracking range, the composite axis tracking mode of coarse and fine tracking is mostly used at present. However, in the coarse fine tracking compound axis mode, the size and ratio of the coarse fine tracking field of view are limited. In order to solve this problem, based on the existing optical path architecture of the ATP system, a primary transition field of view is added, and the corresponding tracking mirror of the transition field of view is added, forming a series structure of double fast control mirrors for precision tracking and high-precision tracking. In this structure, the fast deflection mirror with large stroke and low bandwidth and the fine tracking detector with low sampling frequency first form a fine tracking closed loop to complete the fine tracking with a large range and low bandwidth. On this basis, another fast deflection mirror with small stroke and high bandwidth is combined with a high-precision tracking detector with high sampling frequency to form a high-precision tracking closed loop to realize high-precision and high-bandwidth high-precision tracking. In order to further improve the control accuracy, after the double closed-loop stability of fine TV and high-precision TV, the high-precision TV with a high frame rate is also used for the closed-loop of the large travel tracking mirror, forming a single detection control structure. However, the parameter tuning of this structure is based on the small change of object characteristics. At the same time, it is also necessary to accurately calibrate the target characteristics, so as to facilitate the accurate decoupling of fine tracking and high-precision tracking. The debugging of the controller is complex, and the system robustness is poor under the condition of large changes of target and background. In this paper, a relative angle sensor is added in the high-precision tracking and the position inner loop is added on the basis of the high-precision TV closed loop. On the one hand, the certainty of the control object itself is improved and it is convenient for parameter tuning. On the other hand, the deviation of the sensor is used in the fine tracking closed loop to avoid the problem of system decoupling. This paper analyzes the object characteristics, control system design method and robustness of the compound axis control structure based on this method. The theoretical and experimental results show that when the target characteristics are poor, especially when the lag changes greatly, the proposed method does not need decoupling control and has better robustness and higher accuracy.
-

-
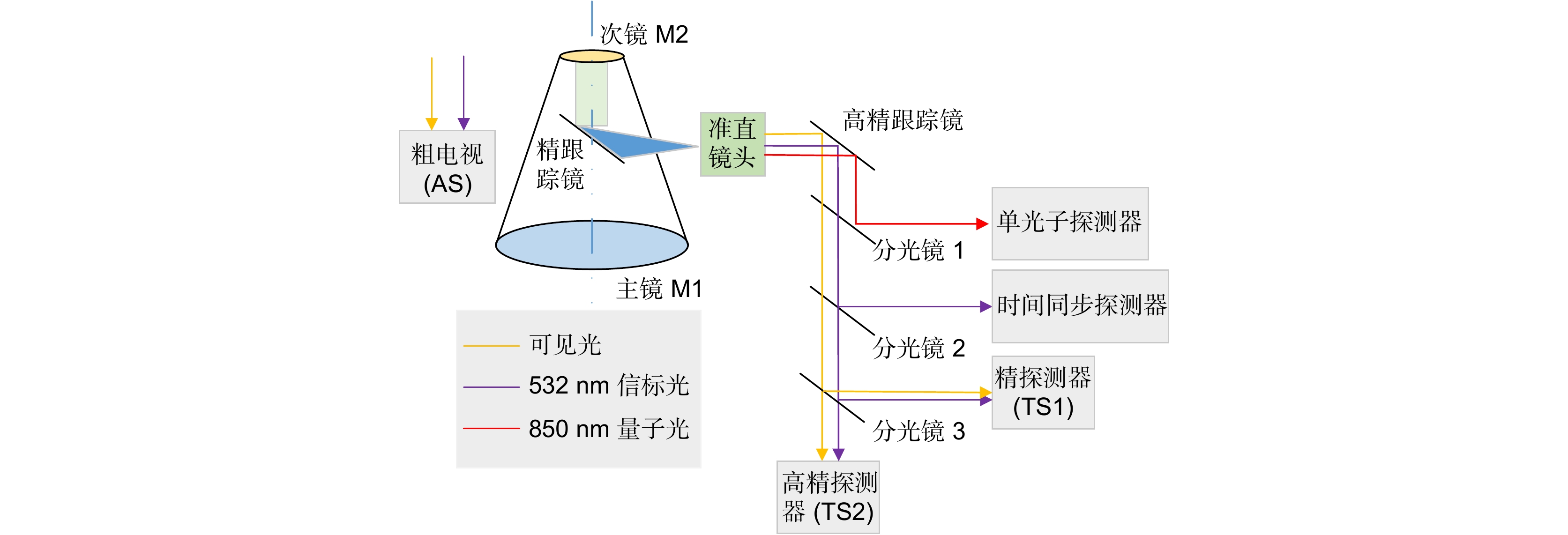
图 1 双跟踪镜串联式复合轴控制光路图
Figure 1. Compound axis control optical path diagram used series double tracking mirrors
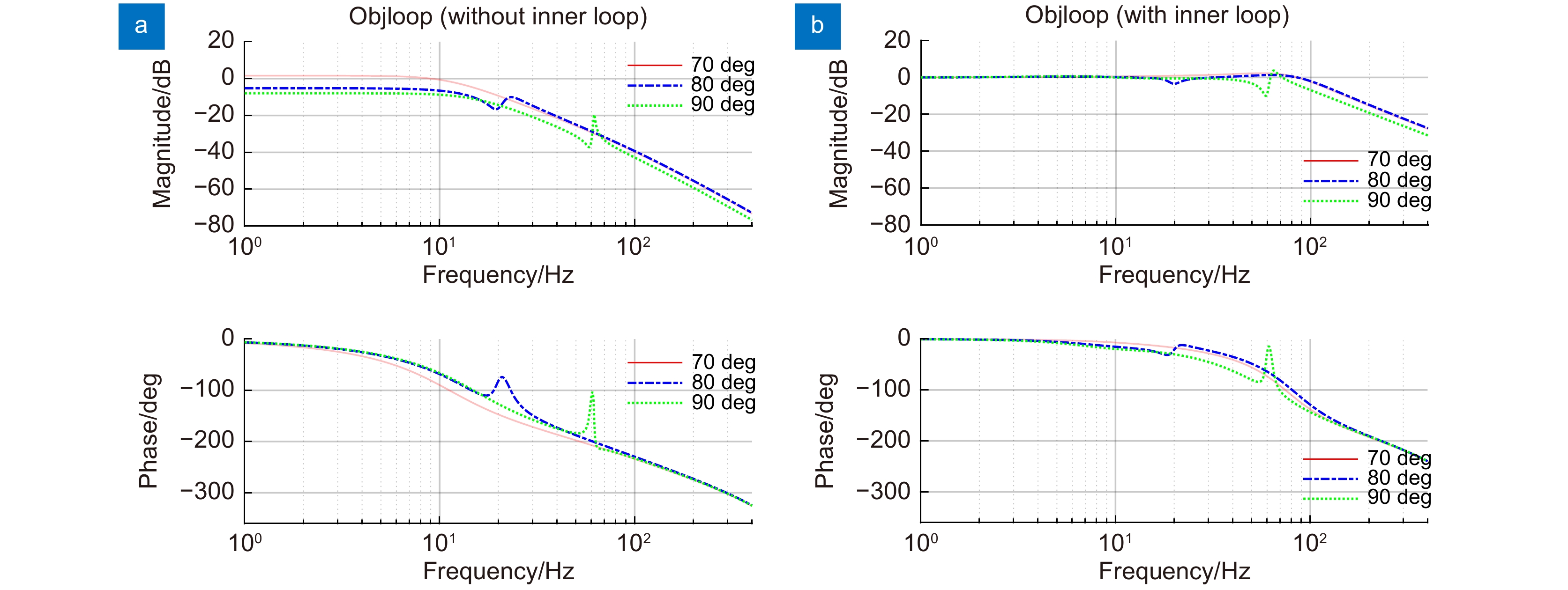
图 5 跟踪镜不同姿态对象特性对比(不加入内环和加入内环对比)。
Figure 5. Comparison of characteristics of objects with different attitudes of tracking mirror (without inner ring and with Inner ring).
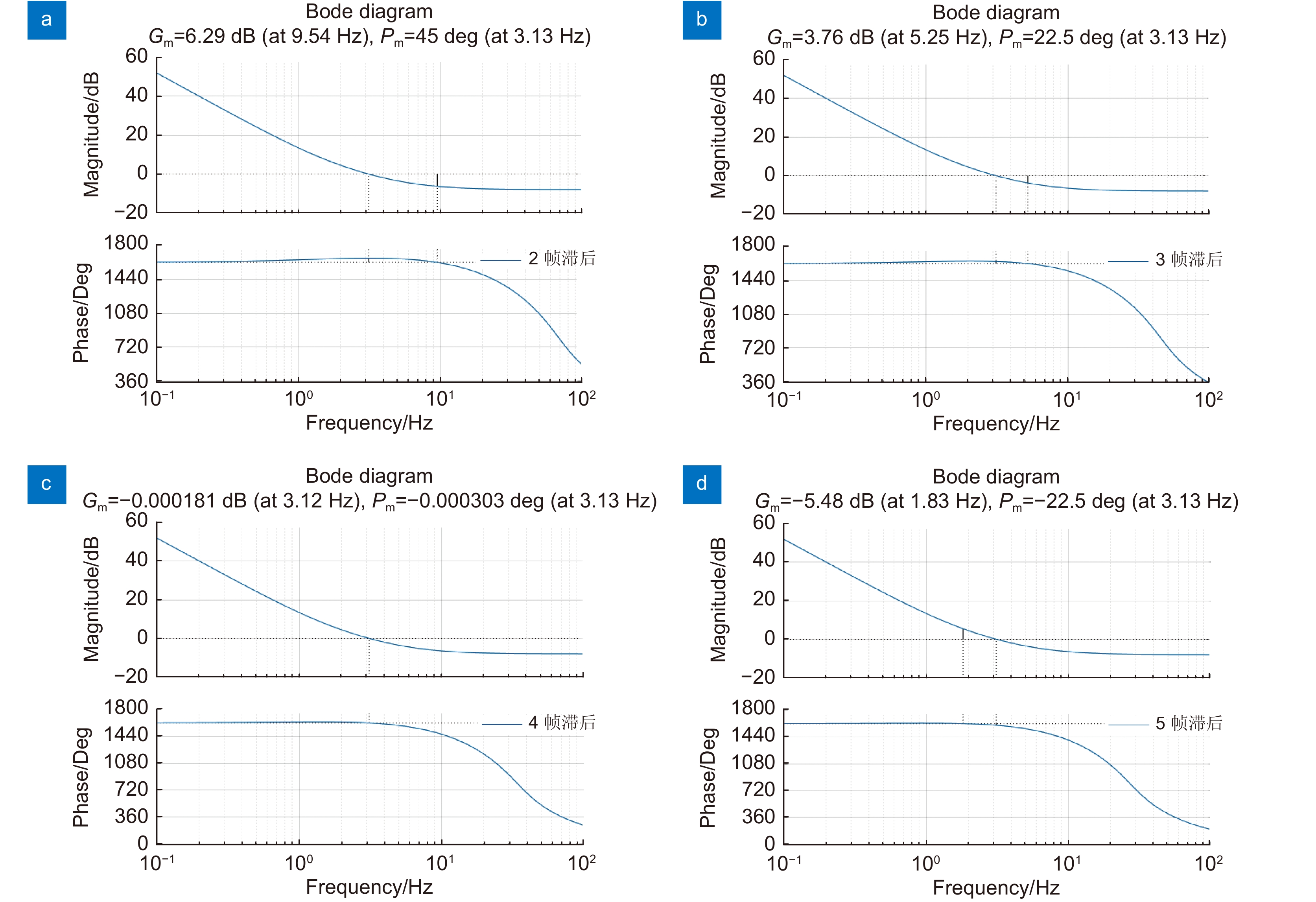
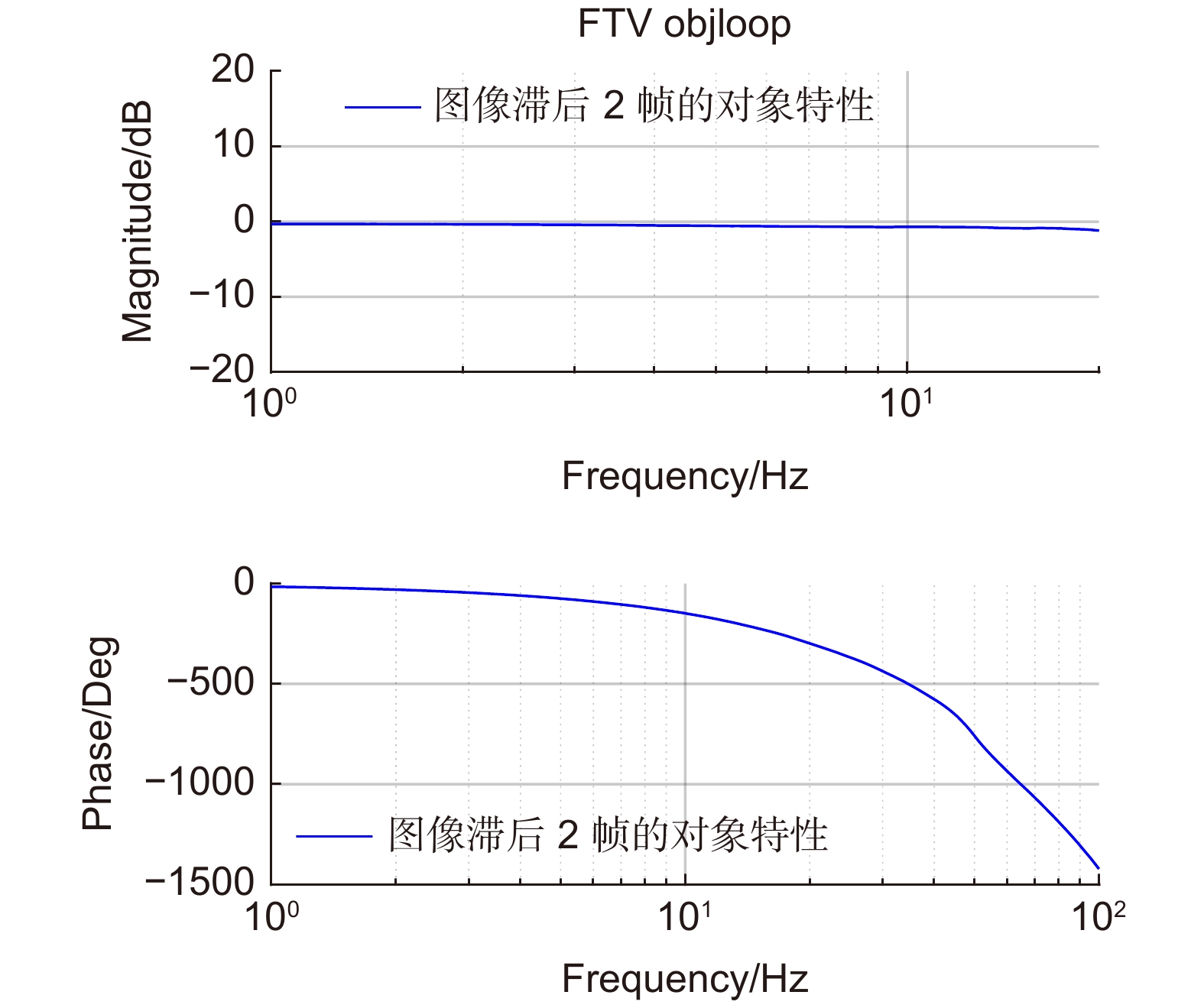
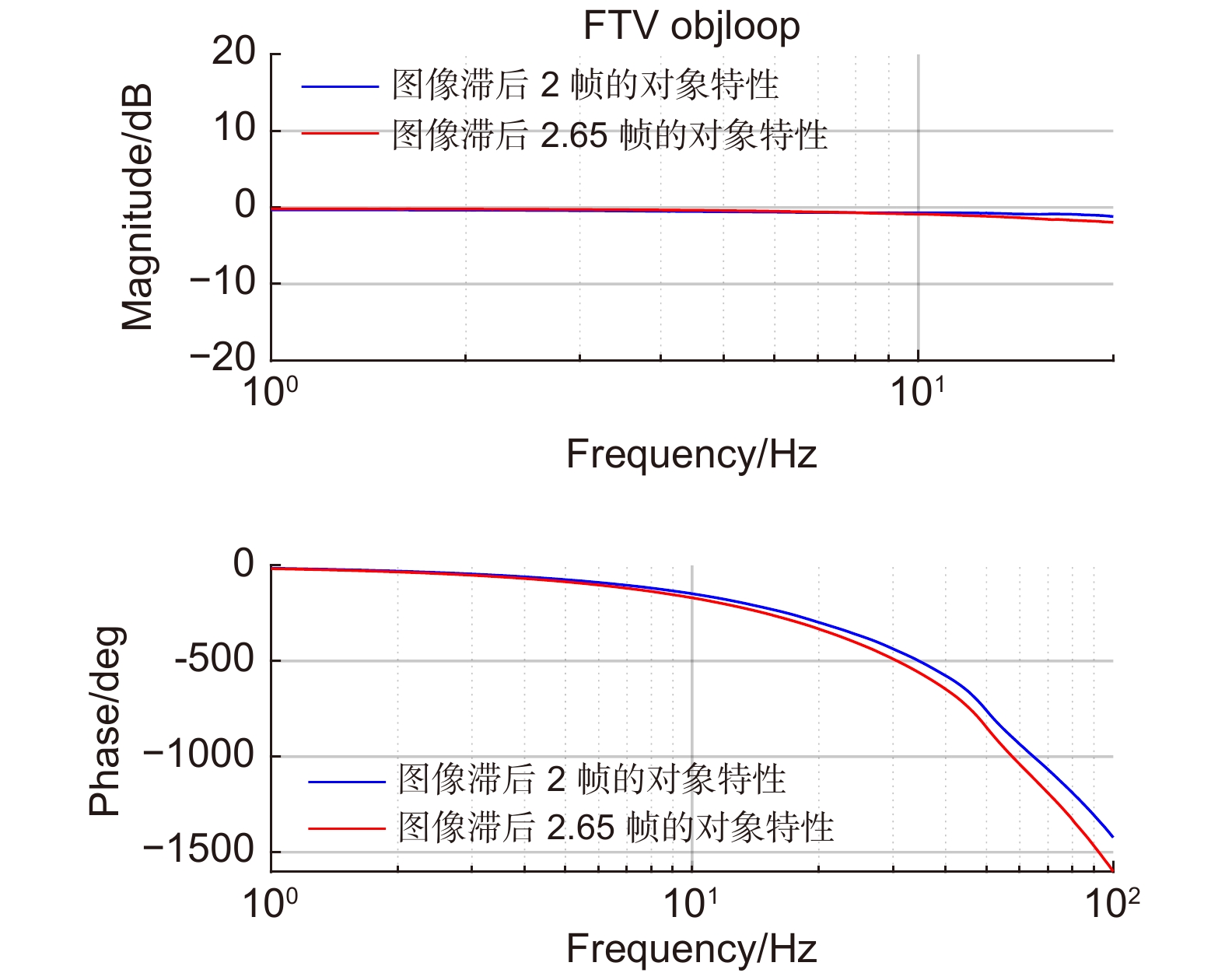
图 7 不同滞后情况下相同校正器的开环校正特性
Figure 7. Open loop correction characteristics of the same corrector under different hysteresis

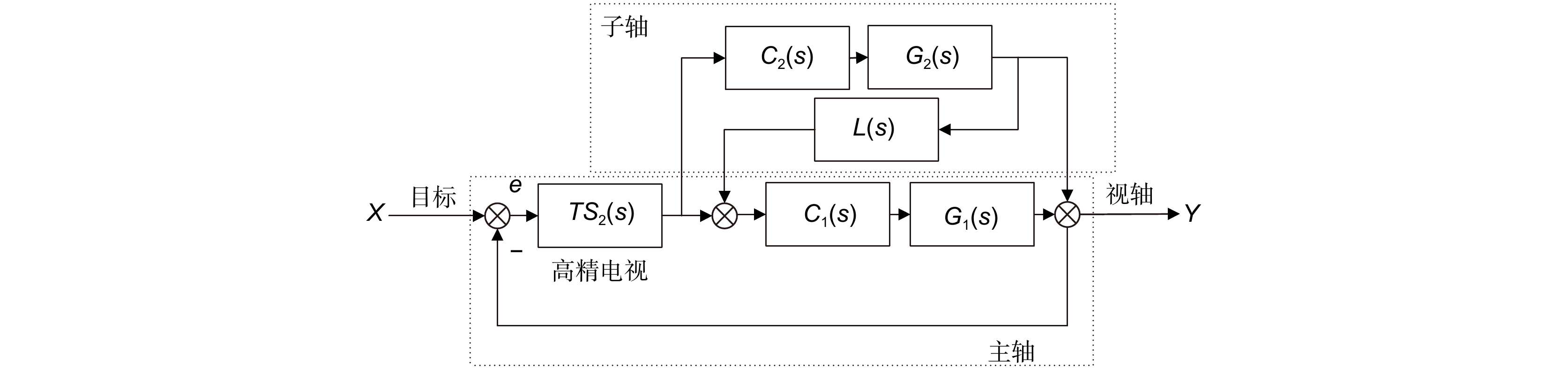
图 8 引入相对角传感器后的高精跟踪镜控制框图
Figure 8. Control block diagram of high precision tracking mirror after introducing relative angle sensor
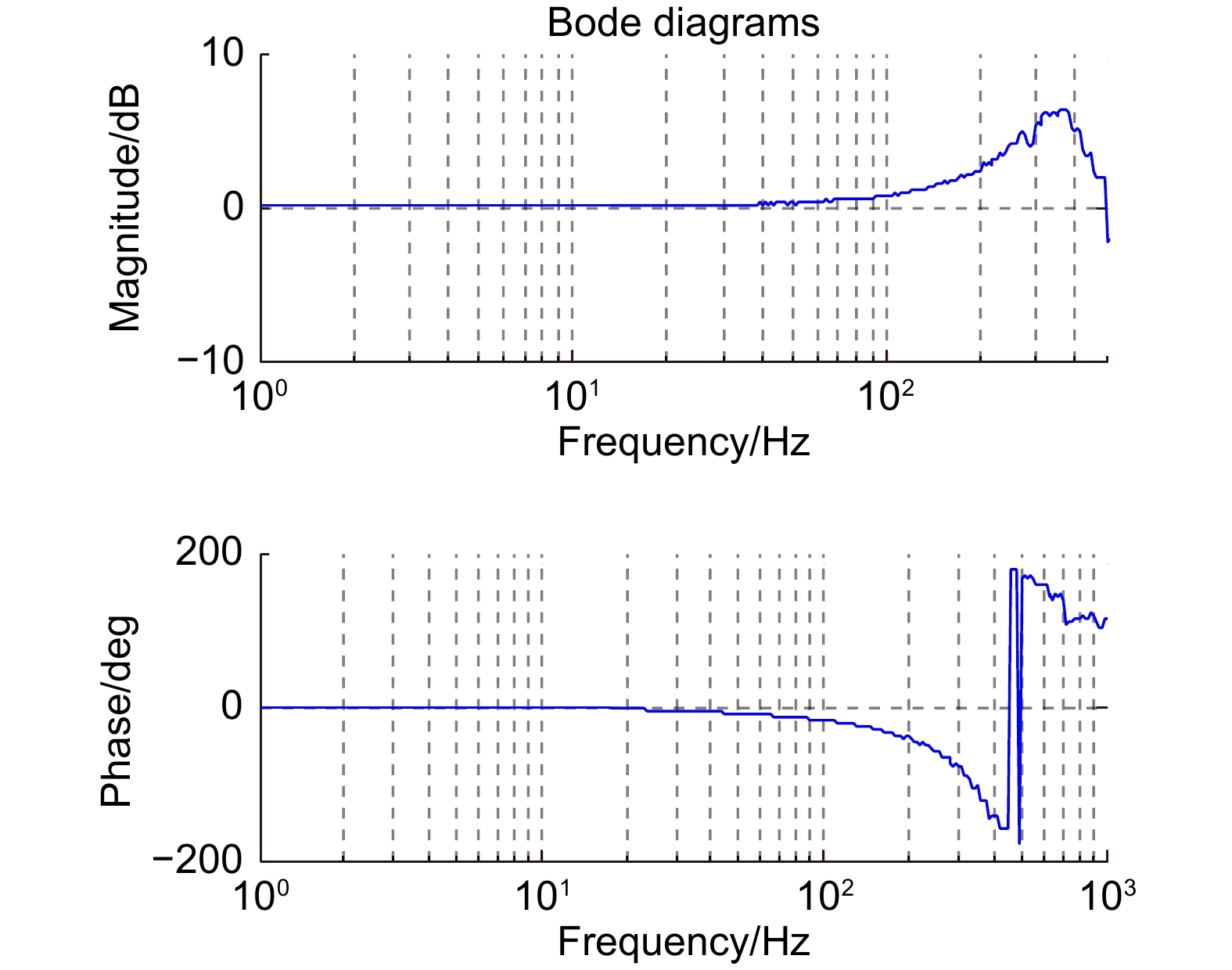
图 9 跟踪镜内部位置闭环特性图
Figure 9. Closed loop characteristic diagram of internal position of tracking mirror
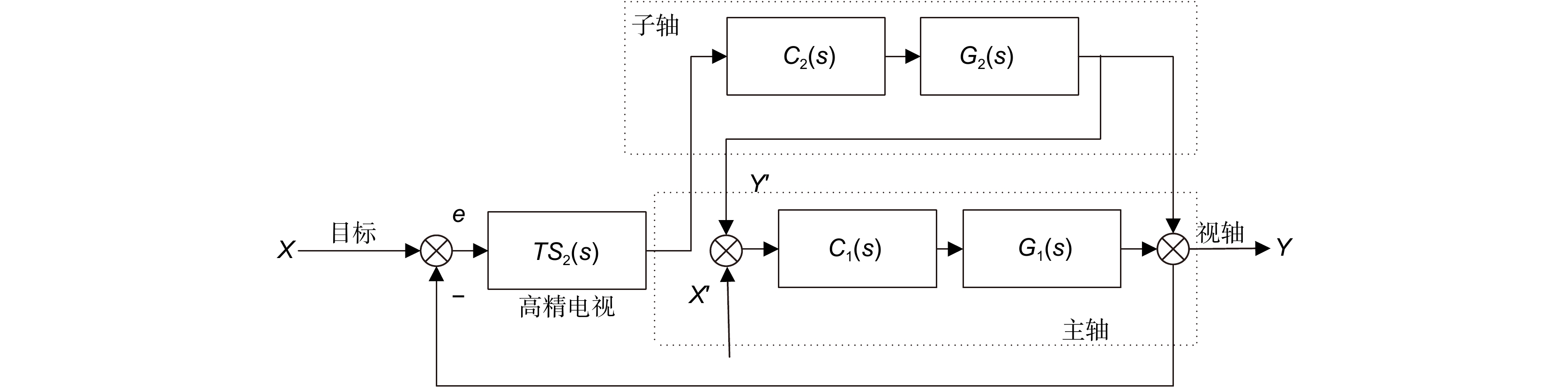
图 10 基于位置修正的单检测复合轴控制系统框架
Figure 10. Single detection compound axis control system framework based on position correction
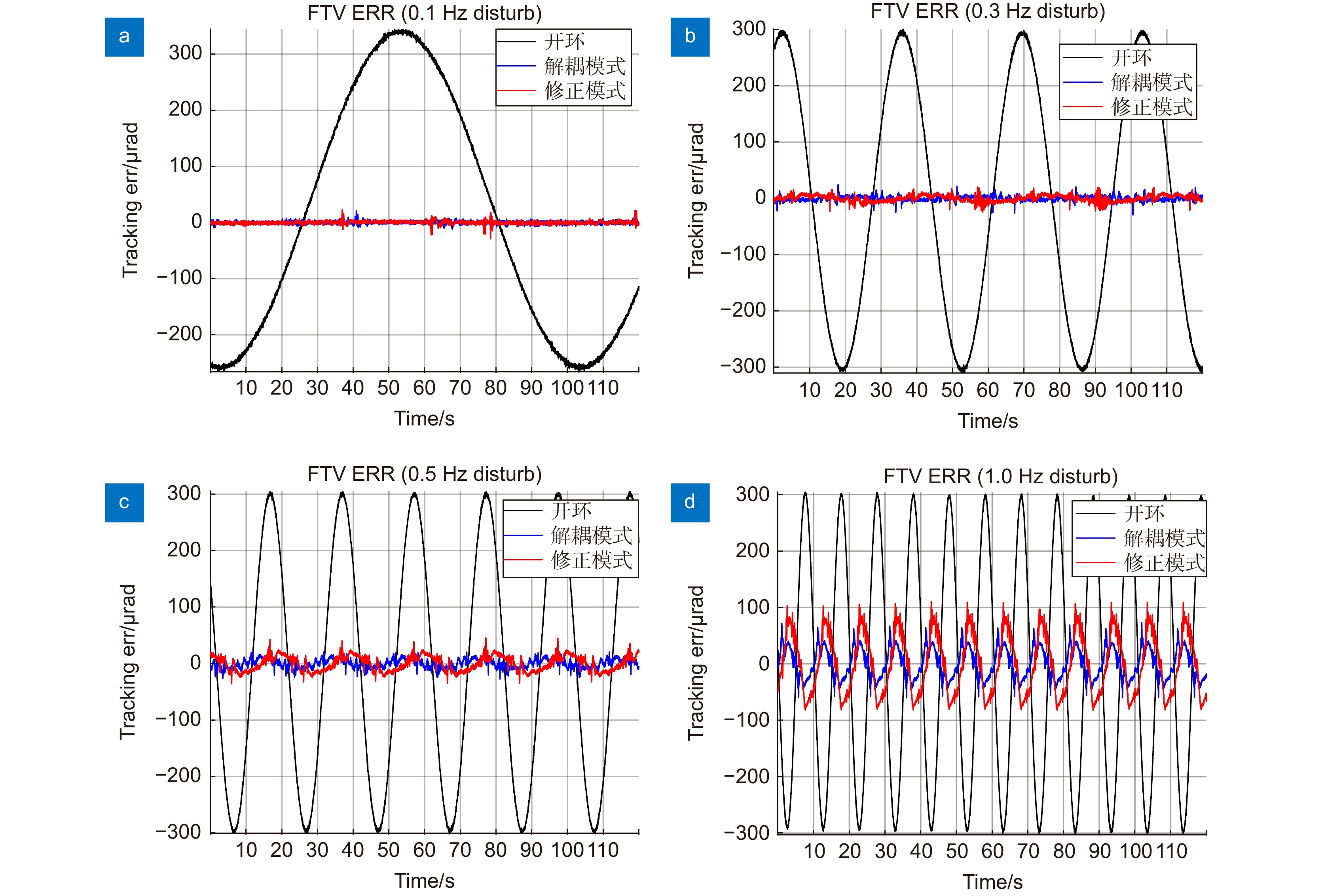
表 1 滞后不变下的跟踪误差
Table 1. Tracking error with constant lag
目标运动频率/Hz 跟踪误差RMS/PV/μrad 系统开环 解耦模式 位置修正模式 0.1 215.986/610.786 2.378/33.323 2.825/52.111 0.3 212.949/610.693 4.399/54.462 5.767/44.911 0.5 211/607.1948 7.6931/50.022 13.34/81.726 1.0 209.494/607.54 26.198/134.06 52.417/192.902  下载: 导出CSV
下载: 导出CSV
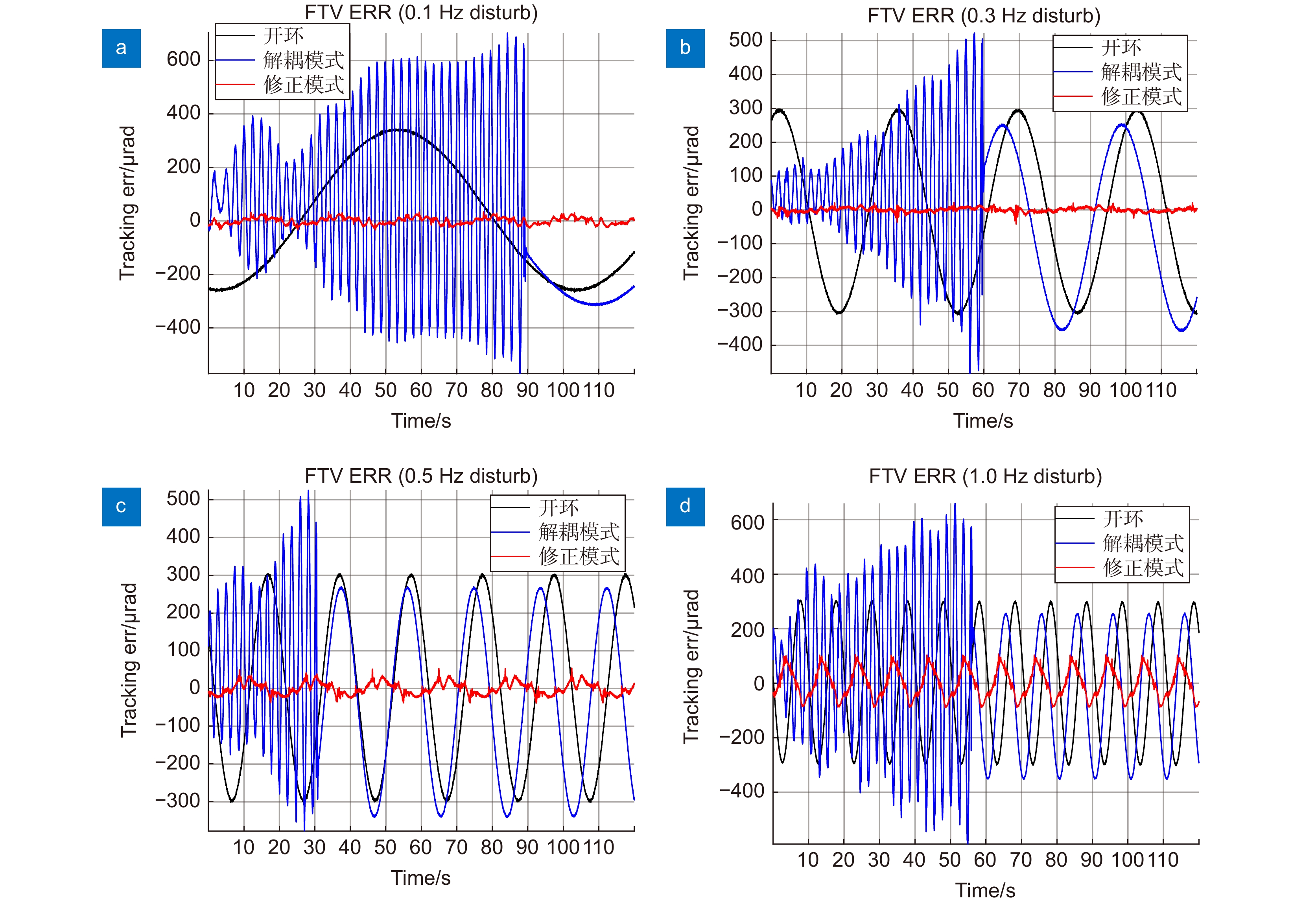
表 2 滞后变化下的跟踪误差
Table 2. Tracking error with variable lag
目标运动频率/Hz 跟踪误差RMS/PV/μrad 系统开环 解耦模式 位置修正模式 0.1 215.986/610.786 不稳定 12.319/68.297 0.3 212.949/610.693 不稳定 6.277/64.75 0.5 211/ 607.1948 不稳定 16.076/93.1 1.0 209.494/607.54 不稳定 52.846/197.242
下载: 导出CSV
-
参考文献
[1] Gisin N, Thew R. Quantum communication[J]. Nat Photonics, 2007, 1(3): 165−171. doi: 10.1038/nphoton.2007.22
[2] Nauerth S, Moll F, Rau M, et al. Air-to-ground quantum communication[J]. Nat Photonics, 2013, 7(5): 382−386. doi: 10.1038/nphoton.2013.46
[3] Wang X L, Cai X D, Su Z E, et al. Quantum teleportation of multiple degrees of freedom of a single photon[J]. Nature, 2015, 518(7540): 516−519. doi: 10.1038/nature14246
[4] Yin J, Cao Y, Li Y H, et al. Satellite-based entanglement distribution over 1200 kilometers[J]. Science, 2017, 356(6343): 1140−1144. doi: 10.1126/science.aan3211
[5] Hilkert J M, Kanga G, Kinnear K. Line-of-sight kinematics and corrections for fast-steering mirrors used in precision pointing and tracking systems[J]. Proc SPIE, 2014, 9076: 90760F.
[6] Rabinovich W S, Moore C I, Mahon R, et al. Free-space optical communications research and demonstrations at the U. S. naval research laboratory[J]. Appl Opt, 2015, 54(31): F189−F200. doi: 10.1364/AO.54.00F189
[7] Kaymak Y, Rojas-Cessa R, Feng J H, et al. A survey on acquisition, tracking, and pointing mechanisms for mobile free-space optical communications[J]. IEEE Commun Surv Tut, 2018, 20(2): 1104−1123. doi: 10.1109/COMST.2018.2804323
[8] Xiao Y J, Liu Y F, Dong R, et al. Experiment study of ATP system for free-space optical communications[J]. Optoelectron Lett, 2011, 7(6): 451−453. doi: 10.1007/s11801-011-1083-y
[9] Alvi B A, Asif M, Siddiqui F A, et al. Fast steering mirror control using embedded self-learning fuzzy controller for free space optical communication[J]. Wireless Pers Commun, 2014, 76(3): 643−656. doi: 10.1007/s11277-014-1731-1
[10] Arvizu A, Santos J, Domínguez E, et al. ATP subsystem for optical communications on a cubesat[C]//IEEE International Conference on Space Optical Systems and Applications, 2015: 1–5.
[11] Ren Y, Liu Z H, Chang L, et al. Adaptive sliding mode robust control for virtual compound-axis servo system[J]. Math Probl Eng, 2013, 2013: 343851.
[12] Nielsen T T. Pointing, acquisition, and tracking system for the free-space laser communication system SILEX[J]. Proc SPIE, 1995, 2381: 194−205. doi: 10.1117/12.207403
[13] Kim I I, Riley B, Wong N M, et al. Lessons learned for STRV-2 satellite-to-ground lasercom experiment[J]. Proc SPIE, 2001, 4272: 1−15. doi: 10.1117/12.430772
[14] Zhang M, Zhang L, Wu J C, et al. Detection and compensation of basis deviation in satellite-to-ground quantum communications[J]. Opt Express, 2014, 22(8): 9871−9886. doi: 10.1364/OE.22.009871
[15] Yin J, Ren J G, Lu H, et al. Quantum teleportation and entanglement distribution over 100-kilometre free-space channels[J]. Nature, 2012, 488(7410): 185−188. doi: 10.1038/nature11332
[16] Farr W, Sburlan S, Sahasrabudhe A, et al. Deep space acquisition and tracking with single photon detector arrays[C]//2011 International Conference on Space Optical Systems and Applications (ICSOS), 2011: 117–121.
[17] Borrello M. A multi stage pointing acquisition and tracking (PAT) control system approach for air to air laser communications[C]//Proceedings of the 2005, American Control Conference, 2005, 6: 3975–3980.
[18] Wang J Y, Yang B, Liao S K, et al. Direct and full-scale experimental verifications towards ground–satellite quantum key distribution[J]. Nat Photonics, 2013, 7(5): 387−393. doi: 10.1038/nphoton.2013.89
[19] Ortiz G G, Lee S, Monacos S P, et al. Design and development of robust ATP subsystem for the Altair UAV-to-ground lasercomm 2.5-Gbps demonstration[J]. Proc SPIE, 2003, 4975: 1−12. doi: 10.1117/12.478931
[20] Tang T, Niu S X, Yang T, et al. Vibration rejection of Tip-Tilt mirror using improved repetitive control[J]. Mech Syst Signal Proc, 2019, 116: 432−442. doi: 10.1016/j.ymssp.2018.06.060
[21] Zhou X, Mao Y, Duan Q W, et al. Multi-order cascade lag control for high precision tracking systems[J]. ISA Trans, 2022, 120: 318−329. doi: 10.1016/j.isatra.2021.03.032
[22] 亓波. 量子通信光学地面站ATP关键技术研究[D]. 成都: 中国科学院研究生院(光电技术研究所), 2014.
Qi B. Study on acquisition, tracking and pointing key technology of optical ground station for quantum communication[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2014.
[23] 王强, 傅承毓, 陈科, 等. 预测轨迹修正单检测型复合轴控制方法[J]. 光电工程, 2007, 34(4): 17−21,38.
Wang Q, Fu C Y, Chen K, et al. Single detector compound axis control based on realtime predicted trajectory correcting method[J]. Opto-Electron Eng, 2007, 34(4): 17−21,38.
[24] 聂光戍, 臧守飞, 郑磊刚, 等. 星间光通信复合轴跟踪结构性能和误差抑制能力分析[J]. 空军工程大学学报(自然科学版), 2011, 12(2): 47−51.
Nie G S, Zang S F, Zheng L G, et al. Study of capability and error restraint ability of optical inter-satellite communications compound axis tracking structure[J]. J Air Force Eng Univ (Nat Sci Ed), 2011, 12(2): 47−51.
[25] 马佳光, 唐涛. 复合轴精密跟踪技术的应用与发展[J]. 红外与激光工程, 2013, 42(1): 218−227. doi: 10.3969/j.issn.1007-2276.2013.01.040
Ma J G, Tang T. Review of compound axis servomechanism tracking control technology[J]. Infrared Laser Eng, 2013, 42(1): 218−227. doi: 10.3969/j.issn.1007-2276.2013.01.040
[26] 丛爽, 汪海伦, 邹紫盛, 等. 量子导航定位系统中的捕获和粗跟踪技术[J]. 空间控制技术与应用, 2017, 43(1): 1−10. doi: 10.3969/j.issn.1674-1579.2017.01.001
Cong S, Wang H L, Zou Z S, et al. Techniques of acquisition and coarse tracking in the quantum navigation and positioning system[J]. Aeros Control Appl, 2017, 43(1): 1−10. doi: 10.3969/j.issn.1674-1579.2017.01.001
[27] 唐涛, 杨涛, 黄永梅, 等. 具有延迟特性的FSM系统中PI-PI控制器[J]. 光电工程, 2013, 40(5): 1−5.
Tang T, Yang T, Huang Y M, et al. PI-PI controller for the time delay control system of FSM[J]. Opto-Electron Eng, 2013, 40(5): 1−5.
[28] Tang T, Ma J G, Ge R. PID-I controller of charge coupled device-based tracking loop for fast-steering mirror[J]. Opt Eng, 2011, 50(4): 043002. doi: 10.1117/1.3567059
[29] 唐涛, 马佳光, 陈洪斌, 等. 光电跟踪系统中精密控制技术研究进展[J]. 光电工程, 2020, 47(10): 200315.
Tang T, Ma J G, Chen H B, et al. A review on precision control methodologies for optical-electric tracking control system[J]. Opto-Electron Eng, 2020, 47(10): 200315.
[30] 徐田荣, 阮勇, 赵志强, 等. 基于误差的观测器在光电跟踪系统中的应用[J]. 光电工程, 2020, 47(11): 190713.
Xu T R, Ruan Y, Zhao Z Q, et al. Error-based observer control of an optic-electro tracking control system[J]. Opto-Electron Eng, 2020, 47(11): 190713.
[31] 牛帅旭, 蒋晶, 唐涛, 等. 望远镜中扰动抑制的Youla控制器优化设计[J]. 光电工程, 2020, 47(9): 190547.
Niu S X, Jiang J, Tang T, et al. Optimal design of Youla controller for vibration rejection in telescopes[J]. Opto-Electron Eng, 2020, 47(9): 190547.
[32] 阮勇, 徐田荣, 杨涛, 等. 具有延迟特性的倾斜镜系统中速度-位置控制方法[J]. 光电工程, 2020, 47(12): 200006.
Ruan Y, Xu T R, Yang T, et al. Position-rate control for the time delay control system of tip-tilt mirror[J]. Opto-Electron Eng, 2020, 47(12): 200006.
-
访问统计



 点击扫一扫
点击扫一扫
图(16)
表(2)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


