
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
提出和发展了适用于液体(水)环境的光热微驱动技术及光热微驱动机构(OTMA)。建立了水环境中OTMA膨胀臂在激光照射下的光热膨胀模型,基于有限元分析推导出膨胀臂的温升分布公式,并对长度1080 μm、宽度90 μm的膨胀臂在4 mW激光照射下的温升分布进行了仿真,理论研究表明了液体环境中光热微驱动技术的可行性。设计与微加工制作了一种对称型OTMA,在波长520 nm、功率可调的激光照射下,首次实现了液体环境中的光热微驱动,实验结果表明膨胀臂的光热偏转量随激光功率的增大而增加。进一步开展了在波长520 nm、有效功率4 mW、频率可调的激光脉冲照射下的光热微驱动实验,结果表明,对称型OTMA在频率0.9 Hz~16.4 Hz的激光脉冲照射下具有良好的动态响应,驱动量(偏转量)振幅在2.6 μm~3.7 μm之间变化,随激光脉冲频率的增大而减小。理论研究及实验曲线趋势表明,适当增大激光功率、提高激光脉冲频率,在液体环境中实现更大偏转量、更高频率的光热微驱动是完全可行的。本文研究拓展了液体环境中的光热微驱动技术,为微光机电系统及微纳米技术领域的应用提供了新的方法与途径。
Abstract:In this paper, the optothermal microactuation technology and optothermal microactuator (OTMA) suitable for water or other liquids are proposed and developed. The model of optothermal expansion and temperature rise distribution is established, and simulation on a 1080 μm long OTMA is conducted, revealing the feasibility of optothermal microactuation technology in water. The optothermal microactuation experiment of a symmetrical OTMA is carried out in water under the irradiation of a laser with a wavelength of 520 nm and adjustable power, revealing that the optothermal deflection increases with the increase of the laser power. Another experiment is carried out under the irradiation of a laser pulse with a wavelength of 520 nm, effective power of 4 mW, and an adjustable frequency, demonstrating that the symmetric OTMA has a good dynamic response under the laser irradiation. The amplitude of the actuating (deflection) amount varies between 2.6 μm and 3.7 μm when irradiated by the laser pulse with a frequency of 0.9 Hz~16.4 Hz, and it decreases with the increase of the frequency of the laser pulse. The theoretical research and experimental curve trend reveals that it is completely feasible to obtain greater deflection and higher frequency optothermal microactuation in water by appropriately increasing the laser power and laser pulse frequency. This research provides new methods and approaches for the application of micro-opto-electromechanical systems and micro-nano technology.
-

Overview: With the rapid development of micro-nano technology and micro-electromechanical systems (MEMS) and micro-opto-electromechanical systems (MOEMS), microactuation technology and microactuators or microactuation mechanisms have become research hotspots. Traditional thermal microactuators are mainly based on electrothermal excitation, which obtains thermal deformation by generating ohmic heat of electric current flowing through the asymmetric expansion arms. Such microactuators are capable of gaining larger displacement and generating bigger actuating forces. Contrary to the advantages, the electrothermal microactuators (ETMAs) always require a built-in power source or connecting circuit, resulting in difficulty of miniaturization of the whole device and operating in liquid. In spite of ETMAs, both symmetric and asymmetric OTMAs are available for obtaining microactuation and being applied in water or other liquids without electric circuits and loops. This paper proposes and develops the optothermal microactuation technology and optothermal microactuator (OTMA) suitable for water or other liquids. An optothermal expansion model of the OTMA's expansion arm in water under laser irradiation is established. The temperature rise distribution formula of the expansion arm is derived by the finite element analysis, and simulation on the expansion arm with a length of 1080 μm and a width of 90 μm under 4 mW laser irradiation is conducted, revealing the feasibility of optothermal microactuation technology in water. The optothermal microactuation experiment of a symmetrical OTMA is carried out in water for the first time under the irradiation of a laser pulse with a wavelength of 520 nm and adjustable power. The results reveal that the amount of optothermal deflection of the expansion arm increases with the increase of the laser power. Another experiment is carried out under the irradiation of a laser pulse with a wavelength of 520 nm, effective power of 4 mW, and an adjustable frequency. The results demonstrate that the symmetric OTMA has a good dynamic response under the laser irradiation. The amplitude of the actuating (deflection) amount varies between 2.6 μm and 3.7 μm when irradiated by the laser pulse with a frequency of 0.9 Hz~16.4 Hz, and it decreases with the increase of the frequency of the laser pulse. The theoretical research and experimental curve trend reveals that it is completely feasible to obtain greater deflection and higher frequency optothermal microactuation in water by appropriately increasing the laser power and laser pulse frequency. This research provides new methods and approaches for the application of micro-opto-electromechanical systems and micro-nano technology.
-

-
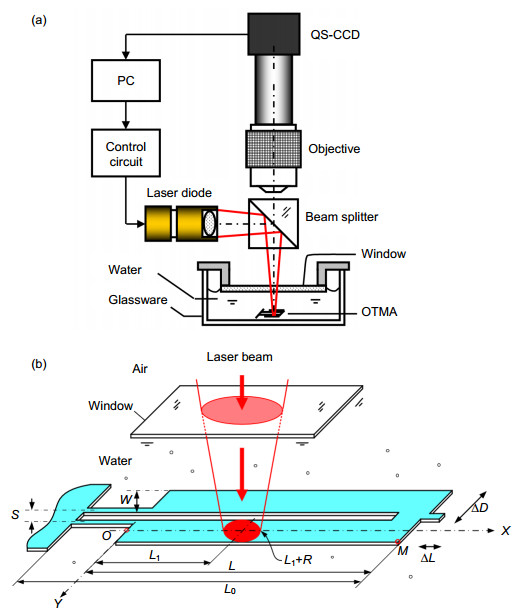
图 1 水环境中光热驱动。(a) 实验装置示意图;(b) 对称型OTMA的光热驱动原理图
Figure 1. Schemes of (a) the experimental device for optothermal microactuation operated in water and (b) the symmetric optothermal microactuator operated in water
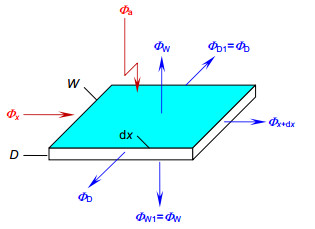
图 2 水环境中膨胀臂的任一微元及其热流分布示意图
Figure 2. Schematic diagram of any element of the expansion arm and its heat flow distribution in water

图 3 仿真得到的对称型OTMA膨胀臂的温升分布
Figure 3. The temperature rise distribution of the symmetrical OTMA expansion arm obtained by simulation
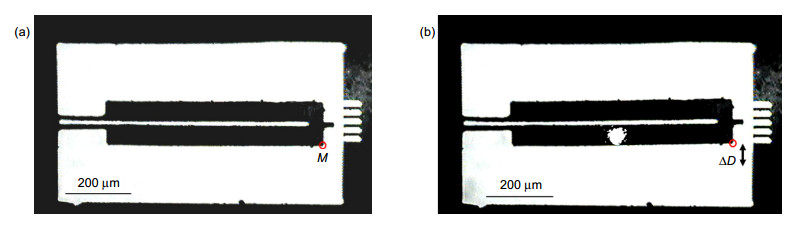
图 5 水环境下对称型OTMA的(a)原始状态和(b)受激光照射时产生光热偏转的显微视频截图
Figure 5. Microscopic images of the symmetric OTMA's (a) original and (b) laser-irradiated states in water
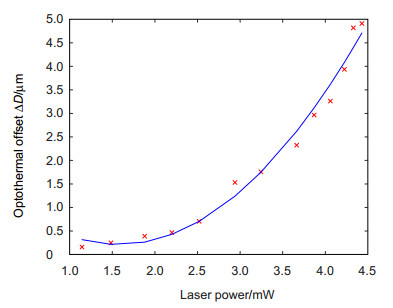
图 6 水环境中OTMA光热偏转量的平均振幅随激光功率变化的曲线
Figure 6. The curve of the average amplitude of OTMA photothermal deflection in water with the change of laser power

图 7 水环境中对称型OTMA在不同激光脉冲频率下的光热驱动实验结果。
Figure 7. Optothermal microactuation experiment results of the symmetrical OTMA under different laser pulse frequencies in water.
表 1 对称型OTMA的尺寸和热学参数
Table 1. Size and thermal parameters of the symmetrical OTMA
符号 描述 具体数值 L/μm OTMA膨胀臂的长度 1080 W/μm OTMA膨胀臂的宽度 86 D/μm OTMA膨胀臂的厚度 20 L0/μm OTMA总长度 1260 S/μm 与OTMA臂相连的两个窄桥的间距 45 R/μm 激光光斑在膨胀臂上的半径 42 K/(W·m-1·K-1) 材料的热导率 0.24 hD/(W·m-2·K-1) 膨胀臂侧面与外界的对流换热系数 25000 hW/(W·m-2·K-1) 膨胀臂水平面与外界的对流换热系数 2500 h1/(W·m-2·K-1) 膨胀臂与左侧固定端热交换的换热系数 25000 h2/(W·m-2·K-1) 膨胀臂与右侧水对流换热系数 25000 P/(mW) 激光功率 4 λ/nm 激光波长 520 f/Hz 激光频率 1~16 α/(K-1) 膨胀臂的膨胀系数 3.2×10-5 T0/(℃) 环境温度(水温) 20 ρ/(g/cm3) 膨胀臂的密度 0.9 C 膨胀臂的热容 1.883  下载: 导出CSV
下载: 导出CSV
-
[1] Conrad H, Schenk H, Kaiser B, et al. A small-gap electrostatic micro-actuator for large deflections[J]. Nat Commun, 2015, 6(1): 10078. doi: 10.1038/ncomms10078
[2] Li H J, Barnes P, Harding E, et al. Large-displacement vertical electrostatic microactuator dynamics using duty-cycled softening/stiffening parametric resonance[J]. J Microelectromech Syst, 2019, 28(3): 351–361. doi: 10.1109/JMEMS.2019.2911183
[3] Liu J K, Liu Y X, Zhao L L, et al. Design and experiments of a single-foot linear piezoelectric actuator operated in a stepping mode[J]. IEEE Trans Industr Electron, 2018, 65(10): 8063–8071. doi: 10.1109/TIE.2018.2798627
[4] Shokrgozar A, Safarpour H, Habibi M. Influence of system parameters on buckling and frequency analysis of a spinning cantilever cylindrical 3D shell coupled with piezoelectric actuator[J]. Proc Instit Mech Eng Part C: J Mech Eng Sci, 2020, 234(2): 512–529. doi: 10.1177/0954406219883312
[5] Duvernoy B, Farkhatdinov I, Topp S, et al. Electromagnetic actuator for tactile communication[M]//Prattichizzo D, Shinoda H, Tan H Z, et al. Haptics: Science, Technology, and Applications. Cham: Springer, 2018.
[6] Salerno M, Firouzeh A, Paik J, et al. A low profile electromagnetic actuator design and model for an origami parallel platform[J]. J Mech Robot, 2017, 9(4): 041005. doi: 10.1115/1.4036425
[7] Yu Y W, Zhang C, Zhou M L. NARMAX model-based hysteresis modeling of magnetic shape memory alloy actuators[J]. IEEE Trans Nanotechnol, 2019, 19: 1–4. http://ieeexplore.ieee.org/document/8910586
[8] Zhang C, Yu Y W, Wang Y F, et al. Takagi–sugeno fuzzy neural network hysteresis modeling for magnetic shape memory alloy actuator based on modified bacteria foraging algorithm[J]. Int J Fuzzy Syst, 2020, 22(4): 1314–1329. doi: 10.1007/s40815-020-00826-9
[9] Evstafyev S, Samoylikov V. Research and analysis of heat exchange processes of a micromechanical mirror based on a thermal microactuator[J]. Proc SPIE, 2019, 11022: 110220U. http://www.researchgate.net/publication/331806734_Research_and_analysis_of_heat_exchange_processes_of_a_micromechanical_mirror_based_on_a_thermal_microactuator
[10] Lin X T, Han Q, Huang J Z. Effect of defects on the motion of carbon nanotube thermal actuator[J]. Nanotechnol Rev, 2019, 8(1): 79–89. doi: 10.1515/ntrev-2019-0007
[11] Kim T H, Choi J G, Byun J Y, et al. Biomimetic thermal-sensitive multi-transform actuator[J]. Sci. Rep. , 2019, 9(1): 7905. doi: 10.1038/s41598-019-44394-x
[12] Kim S, Zhang X, Daugherty R, et al. Ultrasonic electrostatic actuators on a flexible substrate[J]. Proceedings of the IEEE 25th International Conference on Micro Electro Mechanical Systems, Paris, France, 2015: 1193–1196. http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=6170377
[13] Geetha G K, Mahapatra D R. Modeling and simulation of vibro-thermography including nonlinear contact dynamics of ultrasonic actuator[J]. Ultrasonics, 2019, 93: 81–92. doi: 10.1016/j.ultras.2018.11.001
[14] Cao Y, Dong J Y. High-performance low-voltage soft electrothermal actuator with directly printed micro-heater[J]. Sens Actuat A: Phys, 2019, 297: 111546. doi: 10.1016/j.sna.2019.111546
[15] Cao Y, Dong J Y. Fabrication and self-sensing control of soft electrothermal actuator[J]. Proced Manuf, 2020, 48: 43–48. doi: 10.1016/j.promfg.2020.05.018
[16] Liu C, Zhang D X, Zhang H J. Experimental study of the characteristics of novel microactuator based on optothermal expansion[J]. High Technol Lett, 2009, 15(2): 131–134.
[17] Mark J E. Polymer data handbook, 2nd ed[J]. J Am Chem Soc, 2009, 131(44): 16330–16330. http://pubs.acs.org/doi/abs/10.1021/ja907879q
[18] Pope R M, Fry E S. Absorption spectrum (380–700 nm) of pure water. II. Integrating cavity measurements[J]. Appl Opt, 1997, 36(33): 8710–8723. doi: 10.1364/AO.36.008710
-
 点击扫一扫
点击扫一扫
图(7)
表(1)
计量
- 文章访问数: 2947
- PDF下载数: 806
- 施引文献: 0


