
 E-mail Alert
E-mail Alert RSS
RSS
Equivalent acceleration feedforward based on sensor optimization and robust prediction
-
摘要:
在一类仅安装MEMS加速度计和图像传感器的光电跟踪系统中,等效加速度前馈控制方法能够有效提高系统的跟踪能力。但是,加速度计低频噪声、目标合成轨迹延迟和运动模型不确定性,会对跟踪效果带来限制。因此,本文提出一种基于传感器优化与鲁棒预测的等效加速度前馈方法,来进一步提升系统的跟踪能力。使用加速度计测量值和系统加速度模型计算值进行频域融合,可以优化加速度计的低频性能;而采用鲁棒预测算法,能够减弱目标合成轨迹延迟及运动模型不确定性的影响,获得更准确的加速度前馈值。实验结果表明,该方法可以提高系统在0.1 Hz~4.5 Hz的跟踪能力。
Abstract:In a class of photoelectric tracking systems with only the target image sensor and MEMS accelerometer installed, an equivalent acceleration feedforward control method can improve the tracking ability of the system effectively. However, due to the low-frequency noise of accelerometers, the delay of the synthetic trajectory and the uncertainty of the movement model, the tracking accuracy will be limited. Therefore, in this paper, an equivalent acceleration feedforward method based on sensor optimization and robust prediction is proposed to further improve the tracking ability of the system. The frequency-domain fusion using the accelerometer measurement and the calculated acceleration can optimize the low-frequency performance of the accelerometer. Meanwhile, the robust prediction algorithm can reduce the impact of the delay of the synthetic trajectory and the uncertainty of the movement model and give more accurate feedforward acceleration. The experiment shows that this method can further improve the tracking ability of 0.1 Hz~ 4.5 Hz.
-

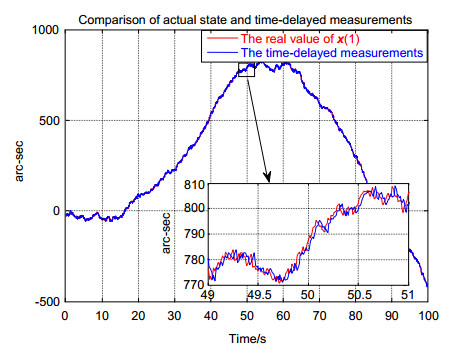
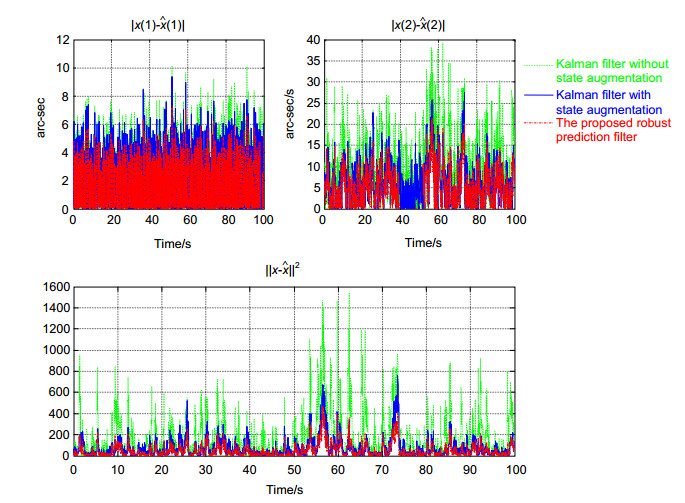
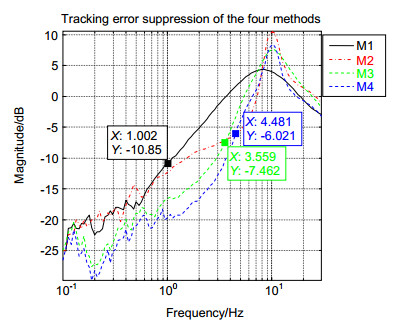
Overview: Photoelectric tracking systems are extensively applied in aerospace, astronomical observation, target tracking, adaptive optics, and other scientific fields. The image sensor CCD (Charge-coupled device) used to detect the target usually has a non-negligible time delay, which severely limits the closed-loop bandwidth and tracking ability of the system. The composite control method based on input feedforward can theoretically improve the tracking ability of the system without changing the stability of the system. Therefore, this method is the main method used in actual engineering. To improve the tracking ability of a class of photoelectric tracking systems with only the target image sensor and accelerometer installed, this paper proposes an equivalent acceleration feedforward control method based on sensor optimization and robust prediction filtering. The ideal feedforward control requires real-time and accurate state information of the target, such as position, velocity, and acceleration. However, CCD can only provide the time-delayed target line-of-sight (LOS) error. To obtain the global trajectory information of the target relative to the tracking platform, additional sensors are needed to provide the position information of the tracking platform itself. As the accelerometer has a phenomenon of "noise submergence" at low-frequency, it will seriously affect the accuracy of synthetic target trajectory at low-frequency. Since the acceleration calculated by the system acceleration model is more accurate at low-frequency, a method of frequency-domain fusion using the calculated acceleration and the accelerometer measurement is proposed. In this method, the low-frequency information of the acceleration calculated by the acceleration model and the mid-and-high-frequency information of the accelerometer measurement data are combined for frequency-domain fusion, and a more accurate platform acceleration in low-frequency is obtained. Then, the fused acceleration and the LOS error detected by the CCD are used to synthesize the target trajectory. Meanwhile, considering the uncertainty of the target motion model and the time delay of the synthetic target trajectory, this paper proposes to use a robust prediction filtering method to replace the traditional Kalman filtering method to predict the target acceleration. The design method and recursive procedure of the proposed robust prediction filter are given in detail. To verify the effectiveness of the proposed method, this paper designs verification experiments in a two-axis photoelectric tracking experimental system. The experimental results show that using the target trajectory synthesized by optimized accelerometer data to achieve equivalent acceleration feedforward can effectively improve the tracking ability of 0.1 Hz~3.5 Hz. Using the robust prediction filtering method to replace the Kalman filter to predict the target acceleration can further improve the tracking ability of 0.1 Hz~4.5 Hz. Therefore, the proposed equivalent acceleration feedforward control method based on sensor optimization and robust prediction filtering can effectively improve the tracking ability of the photoelectric tracking system concerned by this article.
-

-
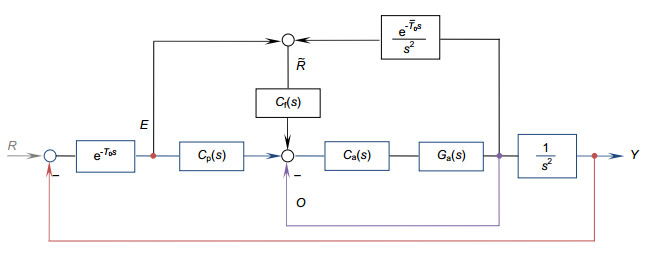
图 1 基于CCD和加速度计的光电跟踪系统等效加速度前馈
Figure 1. Equivalent acceleration feedforward of the photoelectric tracking system based on CCD and accelerometer
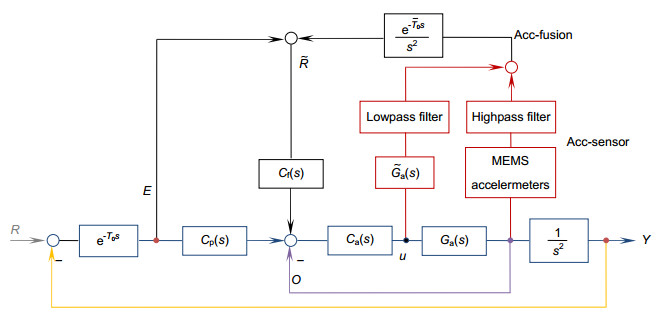
图 2 基于融合加速度的等效加速度前馈
Figure 2. Equivalent acceleration feedforward based on the fusion acceleration
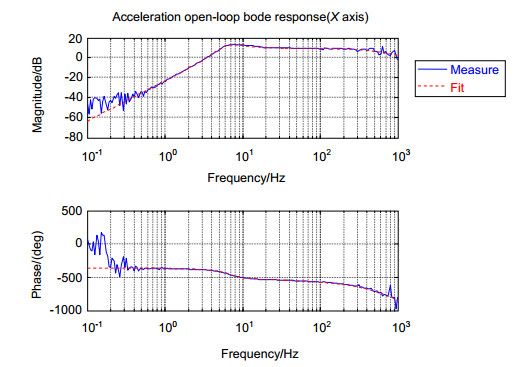
图 6 MEMS加速度计测量的被控对象加速度开环bode响应
Figure 6. Open-loop bode response of the controlled object acceleration measured by MEMS accelerometer
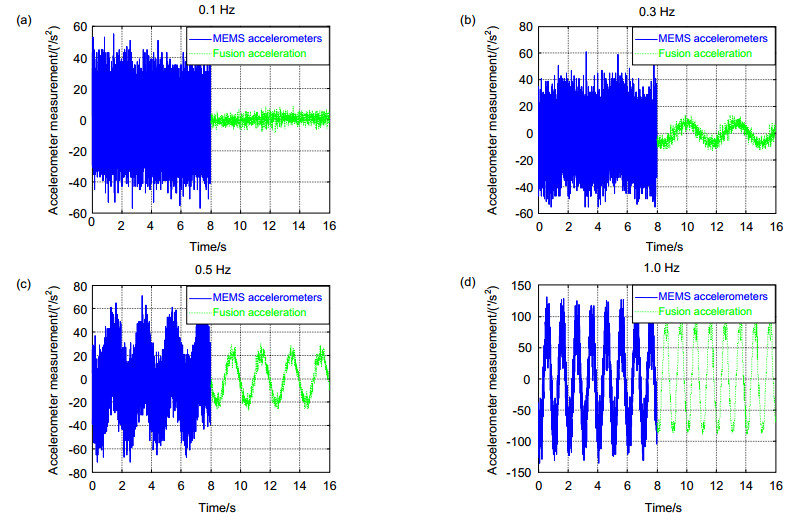
图 7 MEMS加速度计测量加速度和频域融合加速度的对比。
Figure 7. Comparison of the acceleration measured by MEMS accelerometers and obtained from open-loop fusion.
-
[1] 刘京, 邓永停, 李洪文. 基于级联滑模控制的高精度光电跟踪与捕获[J]. 光学精密工程, 2020, 28(2): 350–362. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM202002010.htm
Liu J, Deng Y T, Li H W. High-precision photoelectric acquisition and tracking based on cascade sliding mode control[J]. Opt Precis Eng, 2020, 28(2): 350–362. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM202002010.htm
[2] 李治国, 高立民, 张博妮, 等. 空间光电跟踪系统动量平衡设计与试验[J]. 光学精密工程, 2013, 21(1): 62–68. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201301011.htm
Li Z G, Gao L M, Zhang B N, et al. Design and experiment of momentum balance wheels for optoelectric tracking gimbals[J]. Opt Precis Eng, 2013, 21(1): 62–68. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201301011.htm
[3] 唐涛, 马佳光, 陈洪斌, 等. 光电跟踪系统中精密控制技术研究进展[J]. 光电工程, 2020, 47(10): 200315. doi: 10.12086/oee.2020.200315
Tang T, Ma J G, Chen H B, et al. A review on precision control methodologies for optical-electric tracking control system[J]. Opto-Electron Eng, 2020, 47(10): 200315. doi: 10.12086/oee.2020.200315
[4] Ulich B L. Overview of acquisition, tracking, and pointing system technologies[J]. Proc SPIE, 1988, 887: 40–63. doi: 10.1117/12.944208
[5] Wang C C, Hu L F, Wang Y K, et al. Time delay compensation method for tip-tilt control in adaptive optics system[J]. Appl Opt, 2015, 54(11): 3383–3388. doi: 10.1364/AO.54.003383
[6] He Q N, Luo Y, Mao Y, et al. An acceleration feed-forward control method based on fusion of model output and sensor data[J]. Sens Actuators A: Phys, 2018, 284: 186–193. doi: 10.1016/j.sna.2018.10.031
[7] 孙健. 动态高型控制方法在光电经纬仪跟踪伺服系统中的应用研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2004
Sun J. Study on application of dynamic high type method in tracking servo system of theodolite[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, China, 2004
[8] 邢启江, 董二宝, 陈娟, 等. 光电经纬仪伺服系统动态高型控制[J]. 电光与控制, 2007, 14(3): 140–143 doi: 10.3969/j.issn.1671-637X.2007.03.038
Xing Q J, Dong E B, Chen J, et al. Dynamic high-type control for the servo system of an photoelectric theodolite[J]. Electron Opt Control, 2007, 14(3): 140–143 doi: 10.3969/j.issn.1671-637X.2007.03.038
[9] Ma J S, Kang M S, Kwon W H, et al. Time delay compensation of the image sensor in electro-optical tracking system[J]. J Sens Sci Technol, 1998, 7(1): 23–30.
[10] Cao Z, Chen J, Deng C, et al. Improved smith predictor control for fast steering mirror system[J]. IOP Conf Ser: Earth Environ Sci, 2017, 69(1): 012085.
[11] Tang T, Deng C, Yang T, et al. Error-based observer of a charge couple device tracking loop for fast steering mirror[J]. Sensors, 2017, 7(3): 479. http://www.chemeurope.com/en/publications/1064304/sensors-vol-17-pages-479-error-based-observer-of-a-charge-couple-device-tracking-loop-for-fast-steering-mirror.html?WT.mc_id=ca0438
[12] 徐田荣, 阮勇, 赵志强, 等. 基于误差的观测器在光电跟踪系统中的应用(英文)[J]. 光电工程, 2020, 47(11): 190713 doi: 10.12086/oee 2020 190713
Xu T R, Ruan Y, Zhao Z Q, et al. Error-based observer control of an optic-electro tracking control system[J]. Opto-Electron Eng, 2020, 47(11): 190713 doi: 10.12086/oee 2020 190713
[13] 黄永梅, 马佳光, 付承毓. 目标速度预测在光电跟踪控制系统中的应用[J]. 红外与激光工程, 2004, 33(5): 477–481 doi: 10.3969/j.issn.1007-2276.2004.05.010
Huang Y M, Ma J G, Fu C Y, Application of forecast of moving target velocity in electro-optical tracking control system[J]. Infrared Laser Eng, 2004, 33(5): 477–481 doi: 10.3969/j.issn.1007-2276.2004.05.010
[14] Tang T, Tian J, Zhong D J, et al. Combining charge couple devices and rate sensors for the feedforward control system of a charge coupled device tracking loop[J]. Sensors, 2016, 16(7): 968. doi: 10.3390/s16070968
[15] Sani M H, Saghaei H, Mehranpour M A, et al. A novel all-optical sensor design based on a tunable resonant nanocavity in photonic crystal microstructure applicable in MEMS accelerometers[J]. Photonic Sens, 2021, 11(4): 457–471. doi: 10.1007/s13320-020-0607-0
[16] Bernstein J. An overview of MEMS inertial sensing technology[J]. Sensors, 2003, 20(2): 14–21.
[17] Liu Y, Zhao Y L, Wang W Z, et al. A high-performance multi-beam microaccelerometer for vibration monitoring in intelligent manufacturing equipment[J]. Sens Actuators A: Phys, 2013, 189: 8–16. doi: 10.1016/j.sna.2012.08.033
[18] Liu H B, Zhou T. Robust state estimation for uncertain linear systems with random parametric uncertainties[J]. Sci China Inf Sci, 2017, 60(1): 012202. doi: 10.1007/s11432-015-0327-x
[19] Rubinstein R Y, Kroese D P. Simulation and the Monte Carlo Method[M]. 2nd ed. New York: John Wiley & Sons, 2008.
[20] Tian J, Yang W S, Peng Z M, et al. Inertial sensor-based multiloop control of fast steering mirror for line of sight stabilization[J]. Opt Eng, 2016, 55(11): 1116022. http://europepmc.org/articles/PMC5134579/
-
 下载:
下载:

 点击扫一扫
点击扫一扫
图(8)
计量
- 文章访问数: 3394
- PDF下载数: 919
- 施引文献: 0


