
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
大气偏振模式在导航等领域具有广阔的应用前景,但是由于受到大气偏振信息采集装置物理特性的限制,在同一时刻只能获得局部的、不连续的偏振信息,对实际应用产生影响。针对此问题,本文通过挖掘大气偏振模式分布的连续性,提出一种大气偏振模式生成方法,从局部的偏振信息生成全天域的大气偏振模式。此外,偏振信息往往受到不同的天气条件、地理环境等因素的影响,而这些偏振数据在真实环境中难以采集。针对此问题,本文挖掘不同天气、地理条件下有限样本数据之间的多样性关系,以此关系将生成的大气偏振模式泛化到不同的条件下。本论文在仿真数据和实测数据上进行了实验,并与其它最新方法进行对比,实验结果证明了本文方法的优越性和鲁棒性。
 Abstract:
Abstract:Atmospheric polarization has broad application prospects in navigation and other fields. However, due to the limitation of the physical characteristics of the atmospheric polarization information acquisition device, only local and discontinuous polarization information can be obtained at the same time, which has an impact on the practical application. In order to solve this problem, by mining the continuity of atmospheric polarization mode distribution, this paper proposes a network for generating atmospheric polarization mode from local polarization information. In addition, polarization information is often affected by different weather conditions, geographic environment and other factors, and these polarization data are difficult to collect in the real environment. To solve this problem, this paper mines the diversity relationship between the few-shot data under different weather and geographic conditions, by which the generated atmospheric polarization mode is generalized to different conditions. In this paper, experiments are carried out on the simulated data and measured data. Compared with other new methods, the experimental results prove the superiority and robustness of this proposed method.
-

Overview: As an earth's natural attribute, atmospheric polarization pattern contains rich information of the distribution of the optical properties and stability of the atmospheric polarization pattern in the sky. Even under complex atmospheric environment factors, the atmospheric polarization pattern still presents a series of continuous distribution of time and space. Therefore, in the autonomous navigation, target detection and other fields, it has broad application prospects. However, due to the limitation of the physical characteristics of the atmospheric polarization information acquisition device, only local and discontinuous atmospheric polarization information can be obtained at the same time, and it is difficult to form the atmospheric polarization mode in the whole sky, which will affect the practical application. To solve this problem, this paper proposes a polarization pattern generation network by mining the continuity of the atmospheric polarization pattern distribution. Using this continuous distribution, atmospheric polarization pattern is generated by inverse transformation sampling. Then the generated atmospheric polarization mode is compared with the real atmospheric polarization mode to correct the previously mined continuous distribution characteristics and inverse transformation sampling process. Through continuous iterative optimization, the essential distribution characteristics among the local atmospheric polarization information are finally excavated, and the atmospheric polarization mode model is completed. The missing information is supplemented by the model, and the all-sky atmospheric polarization mode is generated from the local atmospheric polarization information. In addition, atmospheric polarization information is often affected by different weather conditions, geographic environment and other factors, and these polarization data are difficult to collect in the real environment. To solve this problem, this paper excavates the diversity relationship between the few-shot sample data under different weather and geographic conditions, and generalizes the generated atmospheric polarization mode to different conditions based on the relationship. For the above two problems, this paper designs a drive atmospheric polarization pattern generation network based on the few-shot data, which is obtained by digging through the local atmospheric polarization pattern under different weather, geographical locations, and continuity of polarization diversity of the relationship between different data, and which is also based on the formation of polarization information, and the generalization ability to generate the atmospheric polarization pattern under different conditions. In this paper, the simulated data and measured data are used to carry out experiments. Compared with other latest methods, the experimental results prove the superiority and robustness of this proposed method. In addition, the ablation experiment also proves that the network designed in this paper has the generalization ability and better robustness.
-

-
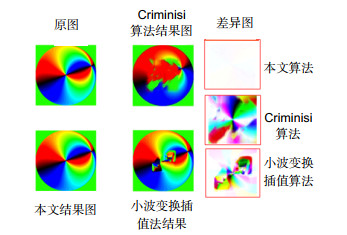
图 1 传统方法与本文方法结果对比(因差异较小,差异图可放大看)
Figure 1. The results of traditional methods are compared with those in this paper. (Because the difference is small, the difference graph can be enlarged)
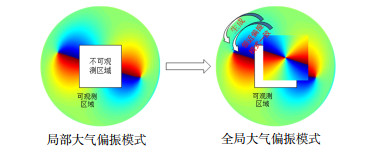
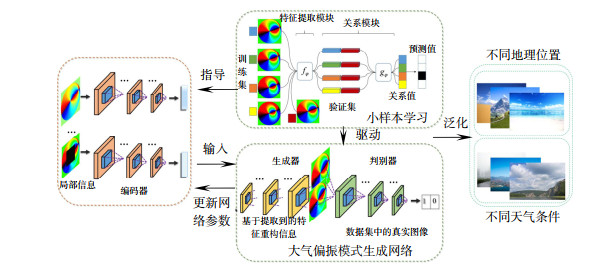
图 2 局部偏振信息生成全局偏振信息
Figure 2. Local polarization information generates global polarization information
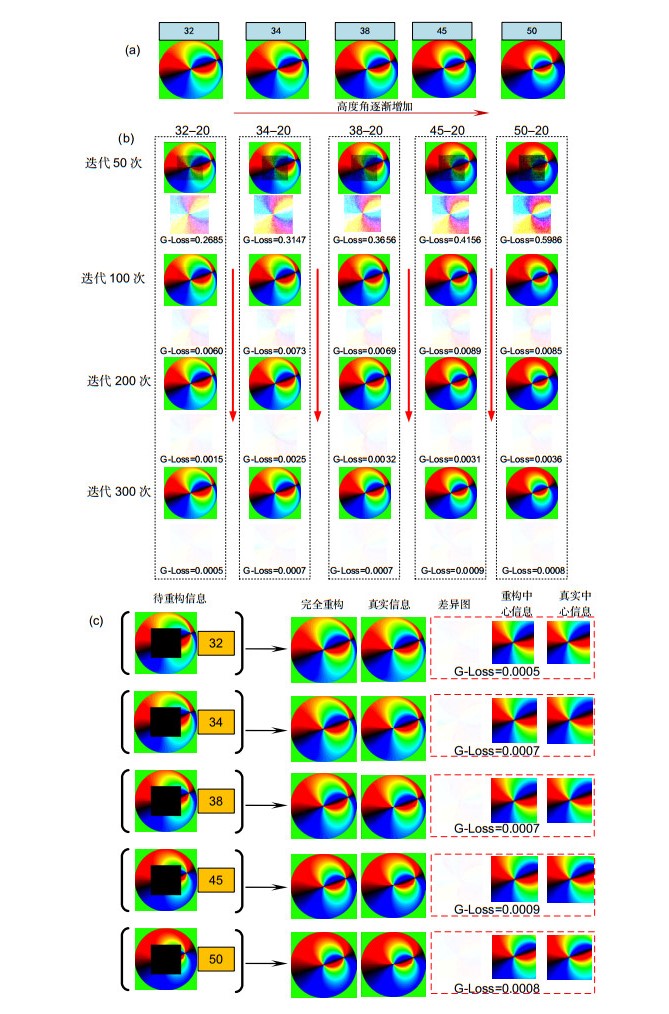
图 4 仿真数据结果图(因差异较小,差异图可放大看)。(a) 相同太阳方位角下,不同太阳高度角的真实图;(b) 不同迭代次数下的生成、差异对比结果图;(c) 相同太阳方位角下,不同太阳高度角的重构结果图
Figure 4. Simulation data result diagram(Because the difference is small, the difference graph can be enlarged). (a) True picture of different solar altitude angles at the same solar azimuth; (b) The generation and difference comparison result graph under different iteration times; (c) Reconstruction results of different solar altitude angles at the same solar azimuth
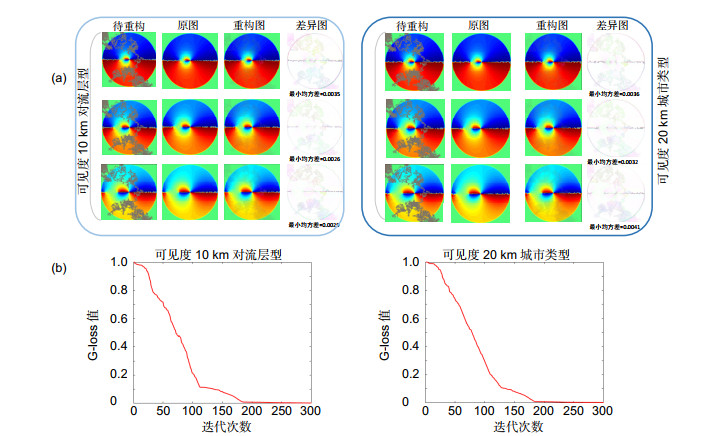
图 5 (a) Libradtran仿真数据重构结果,左为可见度为10 km对流层型重构结果,右为可见度为20 km城市类型重构结果;(b) Libradtran仿真下可见度为10 km对流层型(左)以及可见度为20 km城市类型(右)下迭代最小均方差值(G-Loss)曲线图(图中曲线是趋于0,数值并不为0,实际还是存在一定误差)
Figure 5. (a) Reconstruction results of Libradtran simulation data. The left is the reconstruction result of 10 km troposphere type visibility, and the right is the reconstruction result of 20 km city type visibility; (b) Iteration minimum mean square error (G-loss value) curve under Libradtran simulation. The left is visibility of 10 km tropospheric, and the right is visibility of 20 km city (the curve in the figure tends to 0, but the value is not 0, and there is still some error in fact)
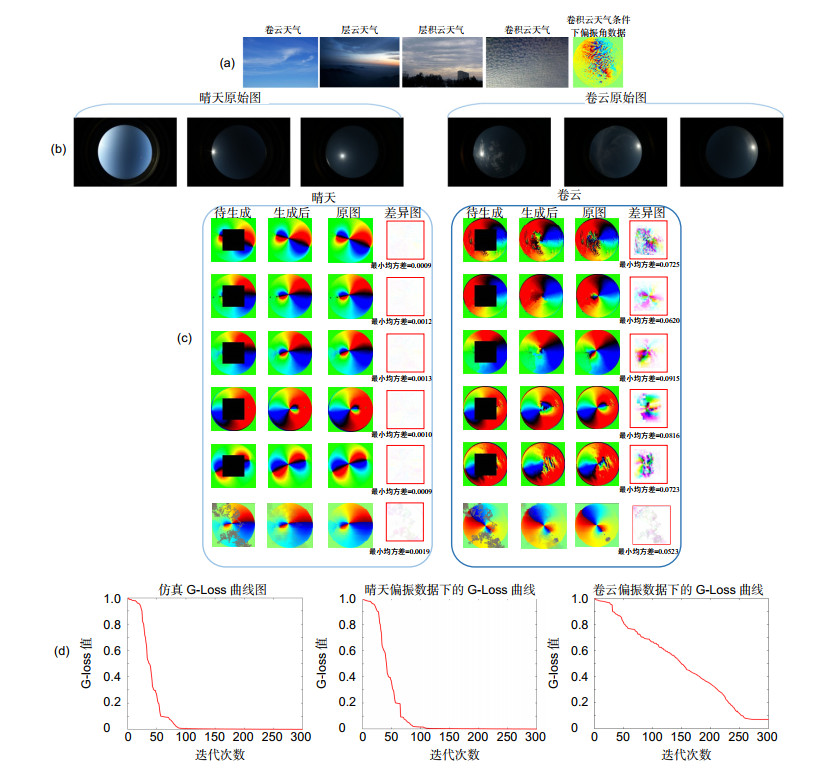
图 6 (a) 不同云层条件下实景图;(b) 少许晴天与卷云天气条件下原始数据;(c) 实测实验结果:左为晴天条件实验结果,右为卷云条件实验结果(因差异较小,差异图可放大看);(d) 仿真数据、实测晴天数据(某一时刻下)、实测卷云数据(某一时刻下)下迭代最小均方差(G_Loss)曲线图。(图中曲线是趋于0,数值并不为0,实际还是存在一定误差)
Figure 6. (a) Real view under different cloud conditions; (b) The raw data under clear and cirrus weather conditions; (c) Experimental results: the left is the experimental results under sunny conditions, and the right is the experimental results under floating clouds(Because the difference is small, the difference graph can be enlarged); (d) Iterated G_LOSS curve diagram under simulation data, measured sunny day data and measured floating cloud data. (The curve in the figure tends to zero. In fact, the value is not zero, but there is still some error in practice)

图 7 对比实验结果图。(a) 原始数据;(b) 待生成数据;(c) 不加入元学习的生成网络结果;(d) 加入元学习的生成网络结果;(e) Criminisi算法结果;(f) 小波变换插值算法结果;(g) 基于深度生成模型结果
Figure 7. Comparison of the experimental results. (a) Original data; (b) Data to be generated; (c) Without adding meta-learning; (d) Adding meta-learning; (e) Criminisi algorithm results; (f) Wavelet transform interpolation algorithm results; (g) Generate model results based on depth
表 1 Libradtran仿真参数设定(其中气溶胶都选定为亚洲夏季气溶胶类型)
Table 1. Libradtran simulation parameter setting (the aerosol type is selected as Asian summer aerosol)
参数类型 A B C D E F 10 km以上的气溶胶状况 一般陆地型 一般陆地型 一般陆地型 一般陆地型 一般陆地型 一般陆地型 10 km以下的气溶胶类型 对流层型 对流层型 对流层型 城市类型 城市类型 城市类型 可见度/km 10 10 10 20 20 20 高度角/(°) 30 45 60 30 45 60 方位角/(°) 180 180 180 180 180 180 光子数 10000 10000 10000 10000 10000 10000 仿真图 





 下载: 导出CSV
下载: 导出CSV
表 2 Libradtran仿真重构结果数据分析
Table 2. Data analysis of Libradtran simulation reconstruction results
对流层型 精准重构差别5°以内 大致重构差别5°~20° 错误重构差别20°以上 城市类型 精准重构差别5°以内 大致重构差别5°~20° 错误重构差别20°以上 
0.68 0.21 0.11 
0.71 0.09 0.20 
0.73 0.15 0.12 
0.69 0.18 0.13 
0.70 0.18 0.12 
0.70 0.15 0.15
下载: 导出CSV
表 3 实测结果数据分析
Table 3. Data analysis of measured results
晴天 精准重构差别5°以内 大致重构差别5°~20° 错误重构差别20°以上 卷云 精准重构差别5°以内 大致重构差别5°~20° 错误重构差别20°以上 
晴天1 0.78 0.13 0.09 
卷云1 0.56 0.23 0.21 晴天2 0.77 0.12 0.11 卷云2 0.55 0.24 0.21 晴天3 0.77 0.11 0.12 卷云3 0.58 0.25 0.17 晴天4 0.80 0.12 0.08 卷云4 0.55 0.22 0.23 晴天5 0.79 0.10 0.11 卷云5 0.57 0.23 0.20 晴天6 0.75 0.06 0.19 卷云6 0.60 0.21 0.19
下载: 导出CSV
表 4 对比实验结果数据分析
Table 4. Data analysis of compare the experimental results
算法 精准重构 大致重构 错误重构 仅生成网络 0.41 0.26 0.33 有限样本生成网络 0.56 0.23 0.21 Criminisi算法 0.10 0.12 0.78 基于小波变换的插值算法 0.34 0.24 0.42 基于深度生成模型算法 0.36 0.16 0.48
下载: 导出CSV
-
[1] Foster J J, Temple S E, How M J, et al. Polarisation vision: overcoming challenges of working with a property of light we barely see[J]. Sci Nat, 2018, 105(3-4): 27. doi: 10.1007/s00114-018-1551-3
[2] Powell S B, Garnett R, Marshall J, et al. Bioinspired polarization vision enables underwater geolocalization[J]. Sci Adv, 2018, 4(4): eaao6841. doi: 10.1126/sciadv.aao6841
[3] 褚金奎, 关乐, 李世奇, 等. 大气偏振模式图分布及仿生偏振导航技术[J]. 遥感学报, 2018, 22(6): 969-979. https://www.cnki.com.cn/Article/CJFDTOTAL-YGXB201806007.htm
Chu J K, Guan L, Li S Q, et al. Atmospheric polarization field pattern distribution and polarization navigation technology[J]. J Remote Sens, 2018, 22(6): 969-979. https://www.cnki.com.cn/Article/CJFDTOTAL-YGXB201806007.htm
[4] Deschamps P Y, Breon F M, Leroy M, et al. The POLDER mission: instrument characteristics and scientific objectives[J]. IEEE Trans Geosci Remote Sens, 1994, 32(3): 598-615. doi: 10.1109/36.297978
[5] 饶瑞中. 现代大气光学[M]. 北京: 科学出版社, 2012: 145-155.
[6] Jin Y Q. Electromagnetic Scattering Modelling for Quantitative Remote Sensing[M]. Singapore: World Scientific, 1994: 87-145.
[7] Kirschvink J L, Gould J L. Biogenic magnetite as a basis for magnetic field detection in animals[J]. Biosystems, 1981, 13(3): 181-201. doi: 10.1016/0303-2647(81)90060-5
[8] Voss K J. Electra-optic camera system for measurement of the underwater radiance distribution[J]. Opt Eng, 1989, 28(3): 283241. http://dx.doi.org/10.1117/12.7976940
[9] Horváth G, Wehner R. Skylight polarization as perceived by desert ants and measured by video polarimetry[J]. J Comp Physiol A, 1999, 184(1): 1-7. doi: 10.1007/s003590050300
[10] Bhandari P, Voss K J, Logan L. An instrument to measure the downwelling polarized radiance distribution in the ocean[J]. Opt Express, 2011, 19(18): 17609-17620. doi: 10.1364/OE.19.017609
[11] 孙洁, 高隽, 怀宇, 等. 全天域大气偏振模式的实时测量系统[J]. 光电工程, 2016, 43(9): 45-50, 55. doi: 10.3969/j.issn.1003-501X.2016.09.008
Sun J, Gao J, Huai Y, et al. Real-time measurement system for the pattern of all skylight polarization[J]. Opto-Electron Eng, 2016, 43(9): 45-50, 55. doi: 10.3969/j.issn.1003-501X.2016.09.008
[12] 高永, 高隽, 范之国, 等. 多光谱目标偏振信息探测系统设计[J]. 微型机与应用, 2013, 32(10): 92-94. doi: 10.3969/j.issn.1674-7720.2013.10.030
Gao Y, Gao J, Fan Z G, et al. Design of multi-spectral target polarization information detection system[J]. Microcomp Appl, 2013, 32(10): 92-94. doi: 10.3969/j.issn.1674-7720.2013.10.030
[13] 褚金奎, 张慧霞, 王寅龙, 等. 多方向偏振光实时定位样机的设计与搭建[J]. 光学 精密工程, 2017, 25(2): 312-318. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201702005.htm
Chu J K, Zhang H X, Wang Y L, et al. Design and construction of autonomous real-time position prototype based on multi-polarized skylight[J]. Opt Precis Eng, 2017, 25(2): 312-318. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201702005.htm
[14] 陈永台, 张然, 林威, 等. 天空实时全偏振成像探测器设计与搭建[J]. 光学 精密工程, 2018, 26(4): 816-824. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201804010.htm
Chen Y T, Zhang R, Lin W, et al. Design and construction of real-time all-polarization imaging detector for skylight[J]. Opt Precis Eng, 2018, 26(4): 816-824. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201804010.htm
[15] Lu H, Zhao K C, Wang X C, et al. Real-time imaging orientation determination system to verify imaging polarization navigation algorithm[J]. Sensors, 2016, 16(2): 144. doi: 10.3390/s16020144
[16] Lu H, Zhao K C, You Z, et al. Real-time polarization imaging algorithm for camera-based polarization navigation sensors[J]. Appl Opt, 2017, 56(11): 3199-3205. doi: 10.1364/AO.56.003199
[17] He X, Li L L, Chen J B, et al. Research of polarization navigation system based on division-of-amplitude[C]//Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference, Nanjing, China, 2016: 306-311.
[18] He X, Li L L, Zhang X S, et al. The division-of-amplitude polarization navigation angle sensor design[C]//Proceedings of 2016 35th Chinese Control Conference, Chengdu, China, 2016: 5357-5361.
[19] 李爱菊, 钮文良. 基于改进Criminisi算法的图像修复[J]. 计算机工程与应用, 2014, 50(18): 167-170. doi: 10.3778/j.issn.1002-8331.1401-0419
Li A J, Niu W L. Image inpainting based on improved Criminisi algorithm[J]. Comput Eng Appl, 2014, 50(18): 167-170. doi: 10.3778/j.issn.1002-8331.1401-0419
[20] 程光权, 成礼智. 基于小波的方向自适应图像插值[J]. 电子与信息学报, 2009, 31(2): 265-269. https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200902005.htm
Cheng G Q, Cheng L Z. Direction adaptive image interpolation via wavelet transform[J]. J Electron Inf Technol, 2009, 31(2): 265-269. https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200902005.htm
[21] 魏昊明, 赵威, 戴星灿. 雾和气溶胶前向散射对消光的影响[J]. 光学 精密工程, 2018, 26(6): 1354-1361. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201806009.htm
Wei H M, Zhao W, Dai X C. Influence of fog and aerosol particles' forward-scattering on light extinction[J]. Opt Precis Eng, 2018, 26(6): 1354-1361. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201806009.htm
[22] 崔岩, 赵金勇, 关乐, 等. 黄海海域天空光偏振分布仿真与测试[J]. 光学学报, 2017, 37(10): 1001004. https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201710004.htm
Cui Y, Zhao J Y, Guan L, et al. Simulation and measurement of skylight polarization distributionin in yellow sea[J]. Acta Opt Sin, 2017, 37(10): 1001004. https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201710004.htm
[23] 张军华, 毛节泰, 王美华. 中国不同地区气溶胶消光特性分析[J]. 大气科学进展, 2002, 19(1): 136-152. https://www.cnki.com.cn/Article/CJFDTOTAL-DQJZ200201011.htm
Zhang J H, Mao J T, Wang M H. Analysis of the aerosol extinction characteristics in different areas of China[J]. Adv Atmos Sci, 2002, 19(1): 136-152. https://www.cnki.com.cn/Article/CJFDTOTAL-DQJZ200201011.htm
[24] Cox D R. The regression analysis of binary sequences[J]. J Roy Stat Soc: Ser B (Methodol), 1958, 20(2): 215-232.
[25] Cherkassky V, Ma Y Q. Practical selection of SVM parameters and noise estimation for SVM regression[J]. Neural Netw, 2004, 17(1): 113-126. doi: 10.1016/S0893-6080(03)00169-2
[26] Käll L, Krogh A, Sonnhammer E L L. A combined transmembrane topology and signal peptide prediction method[J]. J Mol Biol, 2004, 338(5): 1027-1036. doi: 10.1016/j.jmb.2004.03.016
[27] Xu X M, Guo Y W, Wang Z F. Cloud image detection based on Markov Random Field[J]. J Electron (China), 2012, 29(3-4): 262-270. doi: 10.1007/s11767-012-0821-z
[28] Goodfellow I J, Pouget-Abadie J, Mirza M, et al. Generative adversarial nets[C]//Proceedings of the 27th International Conference on Neural Information Processing Systems, Montreal, Canada, 2014: 2672-2680.
[29] Li F F, Fergus R, Perona P. One-shot learning of object categories[J]. IEEE Trans Pattern Anal Mach Intell, 2006, 28(4): 594-611. doi: 10.1109/TPAMI.2006.79
[30] Lake B M, Ullman T D, Tenenbaum J B, et al. Building machines that learn and think like people[J]. Behav Brain Sci, 2017, 40: e253. doi: 10.1017/S0140525X16001837
[31] Finn C, Abbeel P, Levine S. Model-agnostic meta-learning for fast adaptation of deep networks[J]. arXiv preprint arXiv: 1703.03400, 2017.
[32] Li Z G, Zhou F W, Chen F, et al. Meta-SGD: learning to learn quickly for few-shot learning[Z]. arXiv: 1707.09835, 2017.
[33] Sung F, Yang Y X, Zhang L, et al. Learning to compare: relation network for few-shot learning[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 1199-1208.
[34] Pathak D, Krähenbühl P, Donahue J, et al. Context encoders: feature learning by inpainting[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA. arXiv: 1604.07379v2[cs. CV].
[35] Liu H Y, Jiang B, Xiao Y, et al. Coherent semantic attention for image inpainting[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 2019.
[36] Suhai B, Horváth G. How well does the Rayleigh model describe the E-vector distribution of skylight in clear and cloudy conditions? A full-sky polarimetric study[J]. J Opt Soc Am A, 2004, 21(9): 1669-1676. doi: 10.1364/JOSAA.21.001669
[37] Emde C, Buras-Schnell R, Kylling A, et al. The libRadtran software package for radiative transfer calculations (version 2.0.1)[J]. Geosci Model Dev, 2016, 9(5): 1647-1672. doi: 10.5194/gmd-9-1647-2016
[38] Mayer B, Kylling A. Technical note: the libRadtran software package for radiative transfer calculations - description and examples of use[J]. Atmos Chem Phys, 2005, 5(7): 1855-1877. doi: 10.5194/acp-5-1855-2005
-
 点击扫一扫
点击扫一扫
图(7)
表(4)
计量
- 文章访问数: 5492
- PDF下载数: 784
- 施引文献: 0


