
 E-mail Alert
E-mail Alert RSS
RSS
Three-dimensional reconstruction and analysis of target laser point cloud data in simulated turbulent water environment
-
摘要
水下目标三维点云重建在水底勘探和水下无人航行器避障等领域有着重要的应用。本文通过实验室模拟温度和盐度水体湍流,开展了水下目标探测实验,研究了温度差和盐度差对水下潜艇、滑翔机和锚雷的激光点云三维重建效果的影响,并对重建后的三维点云数据进行误差分析。结果表明:在水下目标三维点云重建过程中,随着水体温度湍流和盐度湍流强度的增强,重建点云数据的有效点数明显下降,均值误差明显上升。研究结果对水下三维点云重建系统的研制具有一定参考价值。
Abstract
Three-dimensional point cloud reconstruction of underwater targets has important applications in underwater exploration and obstacle avoidance of underwater unmanned vehicles. In this paper, the underwater target detection experiment is carried out by simulating the temperature and salinity water turbulence in the laboratory, and the influence of temperature difference and salinity difference on the laser point cloud three-dimensional reconstruction effect of underwater submarines, gliders and anchor mines are studied, and the error analysis of the reconstructed 3D point cloud data is carried out. The results show that in the process of underwater target 3D point cloud reconstruction, with the enhancement of water temperature turbulence and salinity turbulence intensity, the effective points of the reconstructed point cloud data decrease significantly, and the mean error increased significantly. The research results have a certain reference value for the development of underwater three-dimensional point cloud reconstruction system.
-
Overview
Overview: Underwater target detection has important applications in underwater accident search and rescue, equipment maintenance and resource exploration. At present, underwater acoustic detection is the most common detection method, but it has the shortcomings of low resolution and target edge blur, and it is difficult to effectively identify the target. The underwater optical detection system perfectly makes up for the shortage of underwater acoustic detection. However, the existence of ocean turbulence seriously restricts the development of underwater optical detection. The generation of ocean turbulence is mainly due to the influence of temperature and salinity. In addition, it is very difficult to carry out underwater detection experiments directly in the real ocean turbulence environment. Therefore, this paper simulates the ocean turbulence in the laboratory by changing the salinity difference and temperature difference of the water body. The effects of turbulence intensity on the three-dimensional reconstruction of underwater laser point clouds of submarines, gliders and anchor mines are studied.
We used lidar to collect the original point cloud data of targets in different water environments within the experimental glass tank. The original point cloud data obtained from the experiment was then processed by using the threshold segmentation refraction correction and point cloud denoising algorithms. In the original point cloud data, the threshold segmentation separated the target point cloud and the backscattered noise point. Refraction correction corrected the influence of refraction during crossing the medium by correcting the parameters in the spherical coordinate system. To filter out noise points in the point cloud data, we first calculated the average distance from all points to their neighbors by the point cloud denoising method and then set the filtering threshold based on the obtained value. Finally, we mounted the 3Dmax-processed standard point cloud data to the k-d tree, queried the minimum distance between all points in the reconstructed point cloud data and the generated k-d tree, and saved the closest point of all points in the reconstructed point cloud. The output was used to show the error between the reconstructed point cloud and the standard point cloud.
In this paper, by changing the temperature difference and salinity difference, the influence of different turbulence intensities on the three-dimensional point cloud reconstruction of underwater targets is studied. The results show that, in the process of 3D point cloud reconstruction of underwater targets, with the increasingly harsh water temperature turbulence and salinity turbulence environment, the effective points of the reconstructed point cloud show a downward trend, and the average error shows an upward trend.
-

-
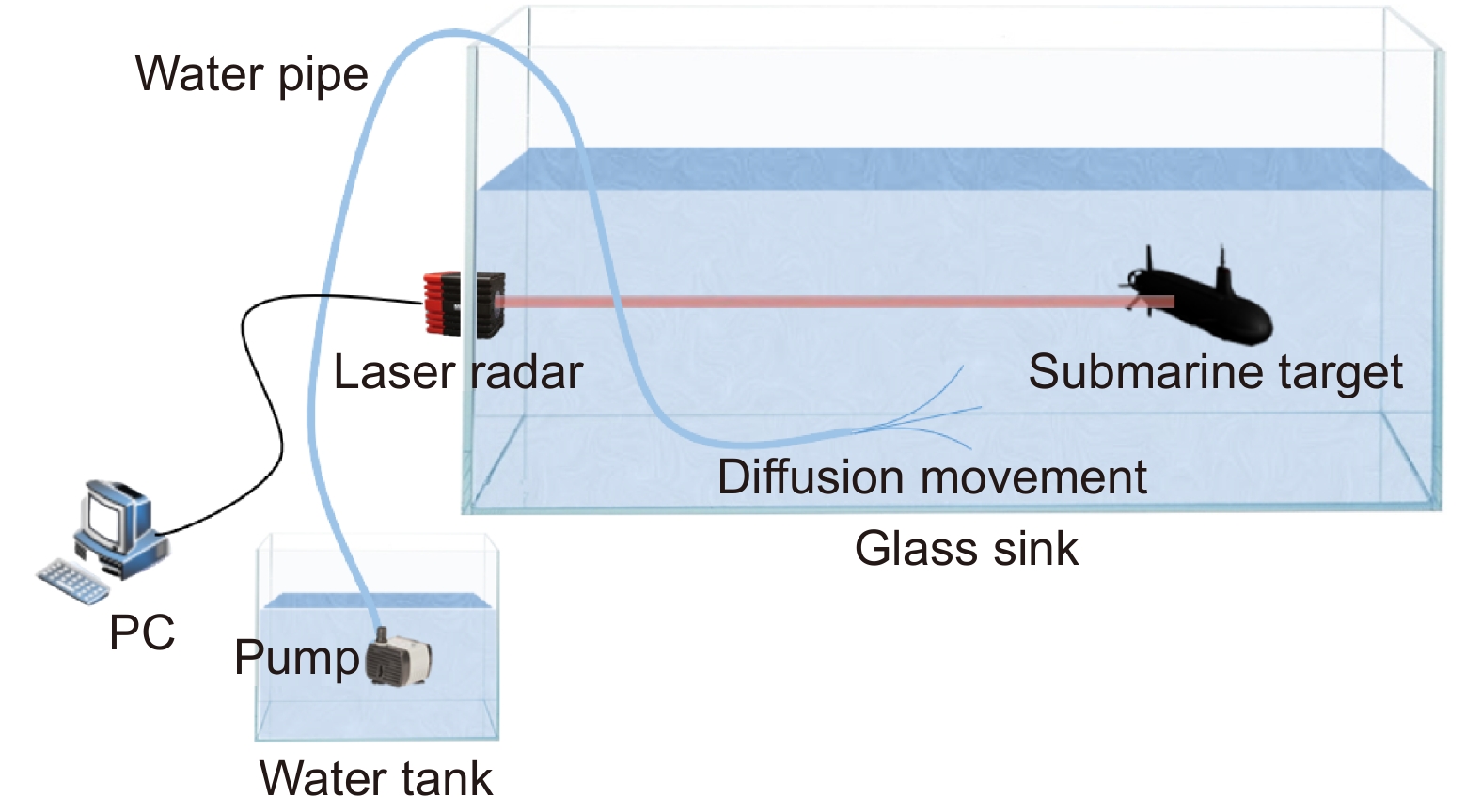
图 1 模拟水下湍流环境下的目标探测实验示意图
Figure 1. Schematic diagram of the target detection experiment under the simulated underwater turbulent environment
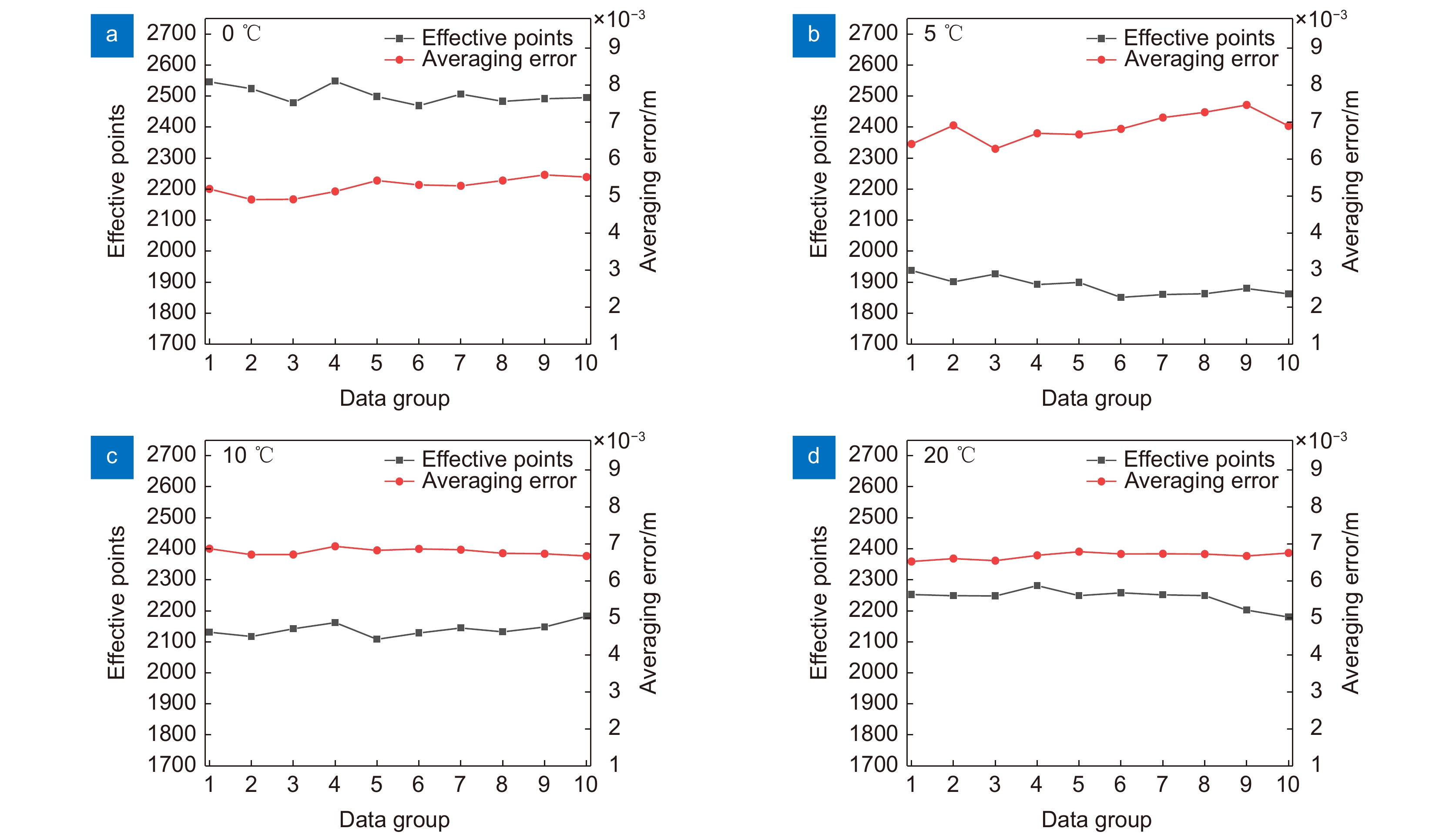
图 2 不同温度湍流对水下滑翔机的三维点云重建影响。(a)温度差0 ℃;(b) 温度差5 ℃;(c) 温度差10 ℃;(d) 温度差20 ℃
Figure 2. Effect of turbulent flow at different temperatures on 3D point cloud reconstruction of the underwater glider. (a) Temperature difference is 0 ℃;(b) Temperature difference is 5 ℃;(c) Temperature difference is 10 ℃;(d) Temperature difference is 20 ℃
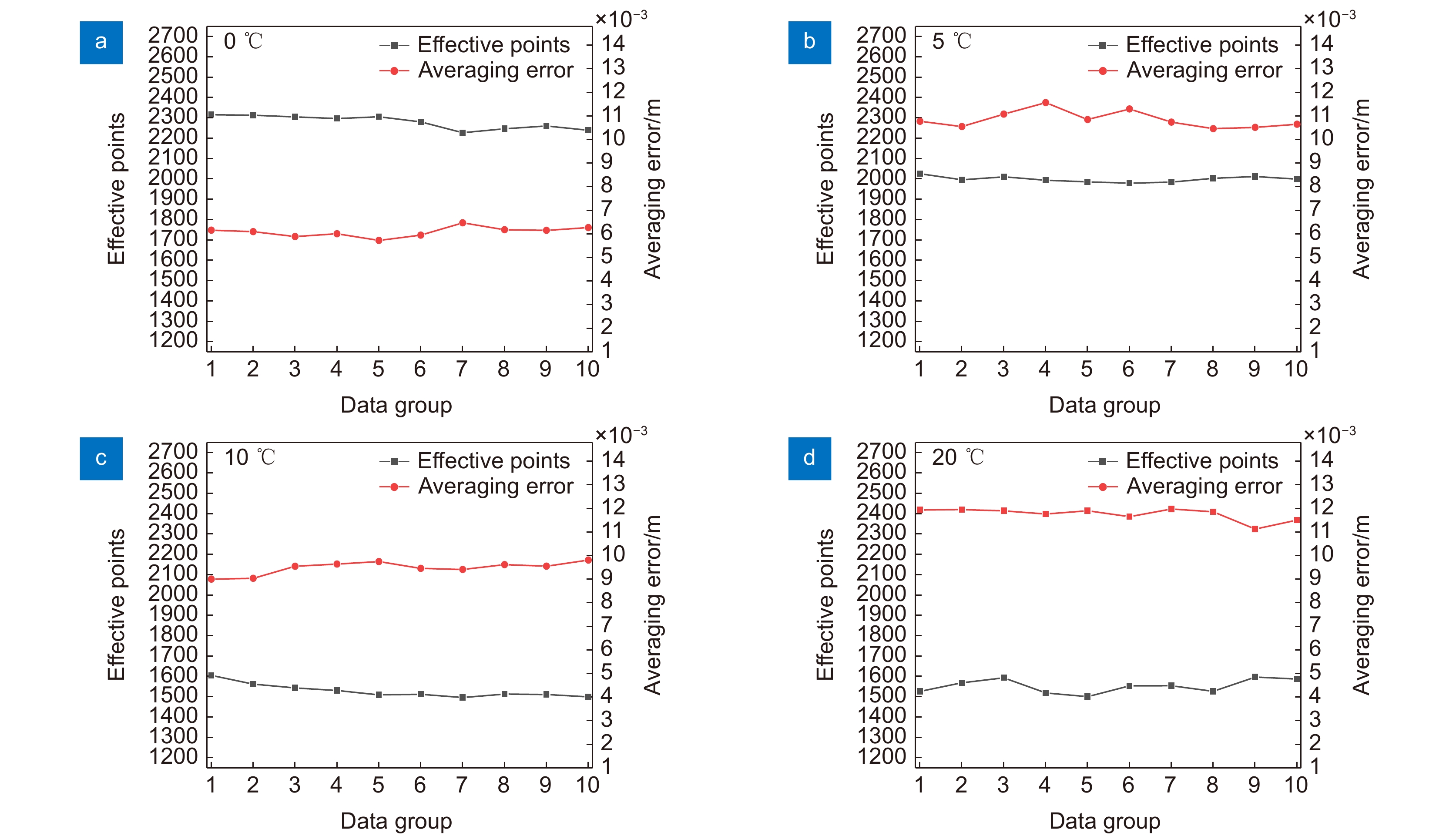
图 3 不同温度湍流对锚雷的三维点云重建影响。(a)温度差0 ℃;(b) 温度差5 ℃;(c) 温度差10 ℃;(d) 温度差20 ℃
Figure 3. Influence of different temperature turbulence on 3D point cloud reconstruction of the underwater anchor mine. (a) Temperature difference is 0 ℃;(b) Temperature difference is 5 ℃;(c) Temperature difference is 10 ℃;(d) Temperature difference is 20 ℃
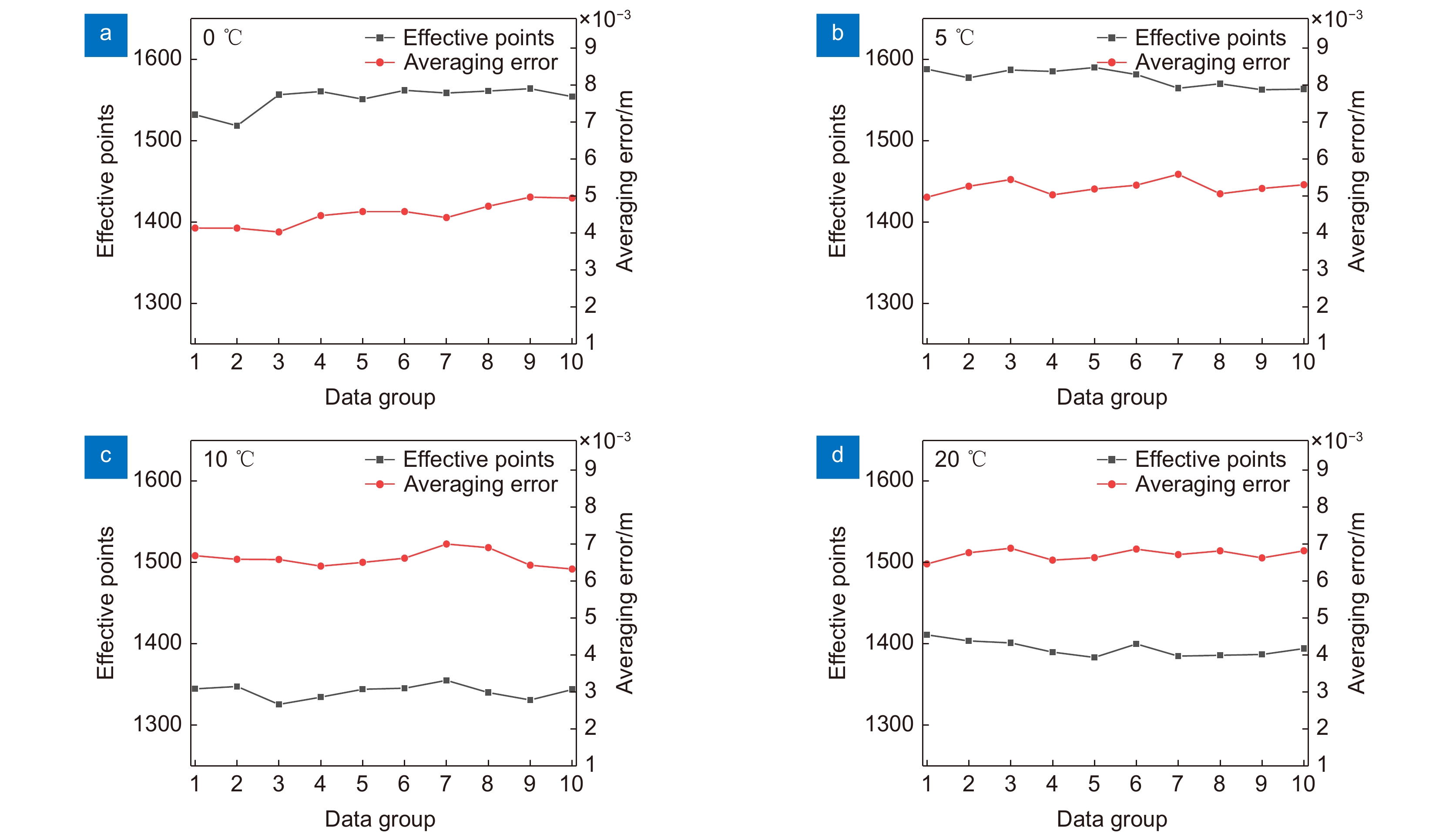
图 4 不同温度湍流对潜艇的三维点云重建影响。(a)温度差0 ℃;(b) 温度差5 ℃;(c) 温度差10 ℃;(d) 温度差20 ℃
Figure 4. Influence of turbulence at different temperatures on 3D point cloud reconstruction of the submarine model. (a) Temperature difference is 0 ℃;(b) Temperature difference is 5 ℃;(c) Temperature difference is 10 ℃;(d) Temperature difference is 20 ℃
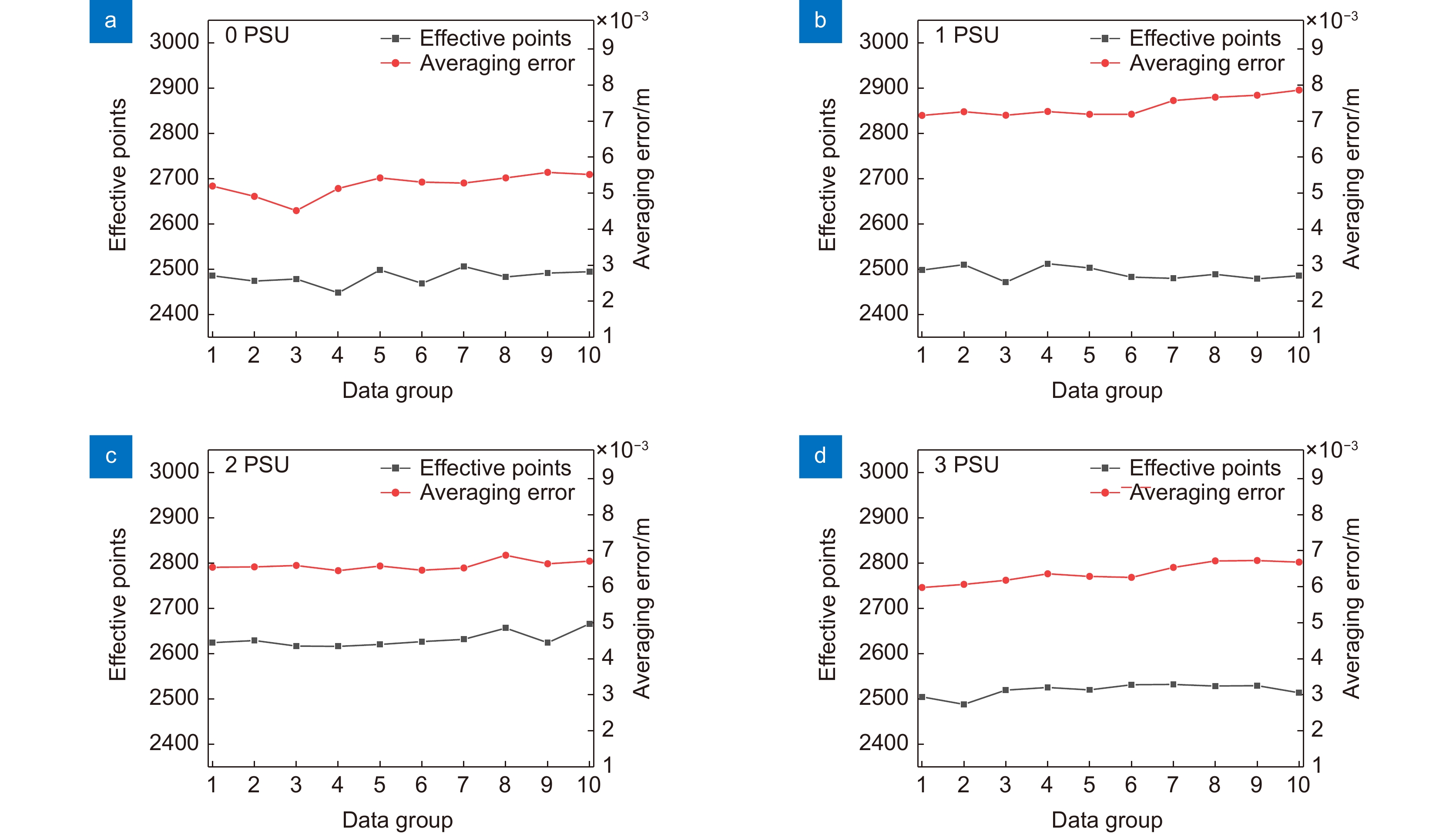
图 5 不同盐度湍流对水下滑翔机的三维点云重建影响。(a)盐度差0 PSU;(b) 盐度差1 PSU;(c) 盐度差2 PSU;(d) 盐度差3 PSU
Figure 5. Influence of turbulent flow with different salinity on 3D point cloud reconstruction of the underwater glider. (a) Salinity difference is 0 PSU;(b) Salinity difference is 1 PSU;(c) Salinity difference is 2 PSU;(d) Salinity difference is 3 PSU
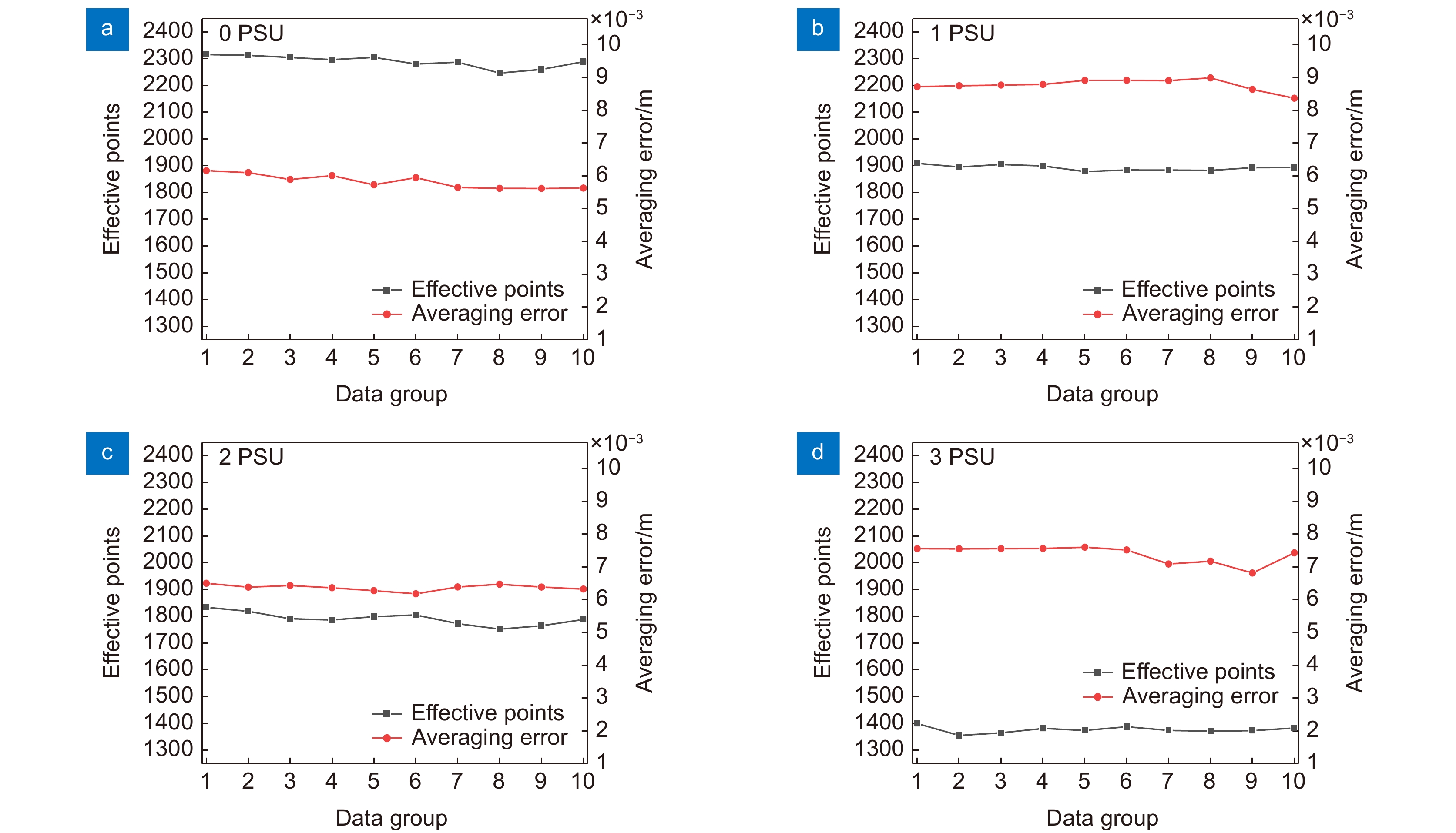
图 6 不同盐度湍流对锚雷的三维点云重建影响。(a)盐度差0 PSU;(b) 盐度差1 PSU;(c) 盐度差2 PSU;(d) 盐度差3 PSU
Figure 6. Influence of different salinity turbulence on 3D point cloud reconstruction of the underwater anchor mine. (a) Salinity difference is 0 PSU; (b) Salinity difference is 1 PSU;(c) Salinity difference is 2 PSU;(d) Salinity difference is 3 PSU
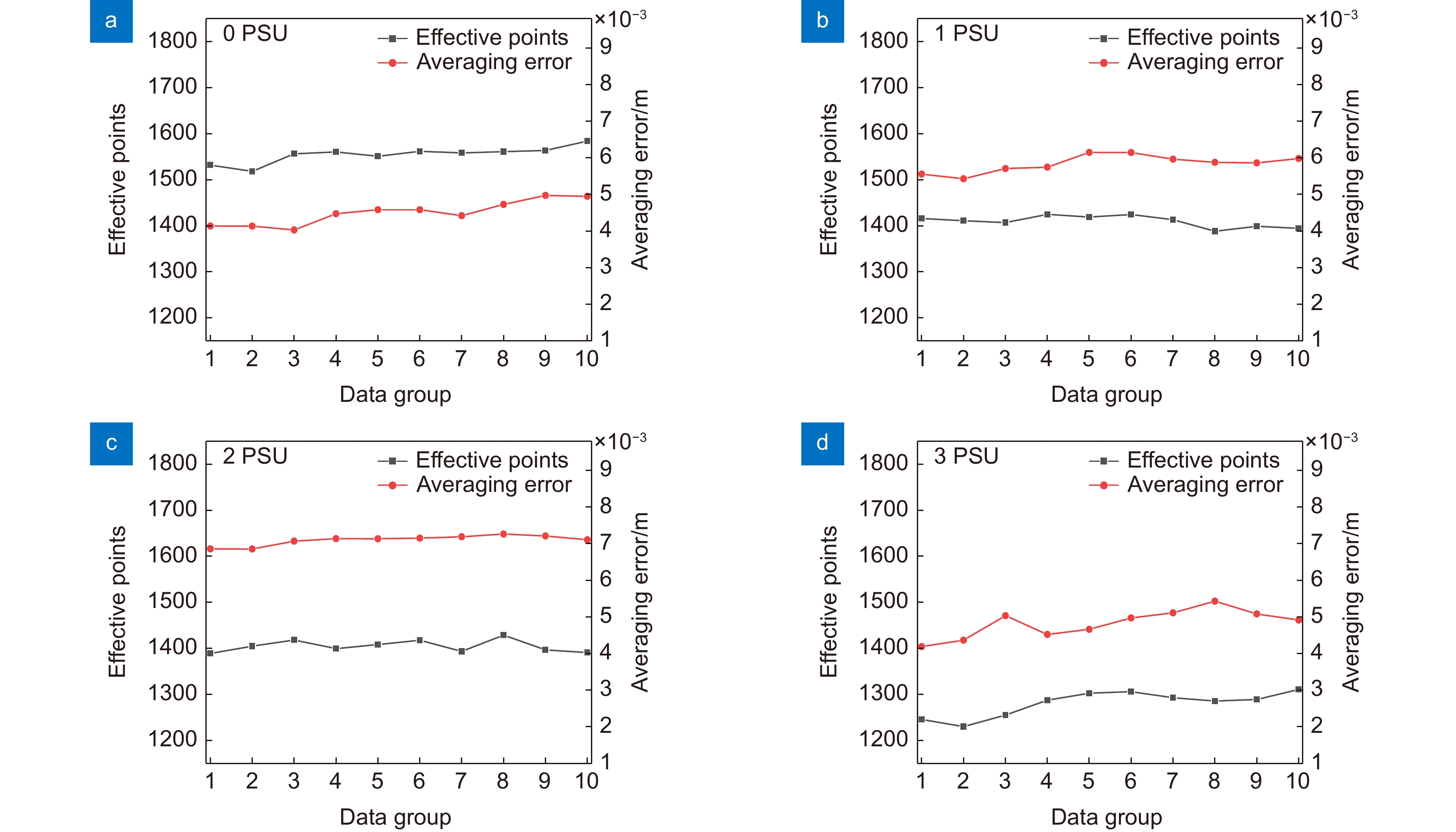
图 7 不同盐度湍流对潜艇的三维点云重建影响。(a)盐度差0 PSU;(b) 盐度差1 PSU;(c) 盐度差2 PSU;(d) 盐度差3 PSU
Figure 7. Influence of turbulent flow with different salinity on 3D point cloud reconstruction of the submarine model. (a) Salinity difference is 0 PSU; (b) Salinity difference is 1 PSU;(c) Salinity difference is 2 PSU; (d) Salinity difference is 3 PSU
-
参考文献
[1] Korotkova O, Farwell N. Effect of oceanic turbulence on polarization of stochastic beams[J]. Opt Commun, 2011, 284(7): 1740−1746. doi: 10.1016/j.optcom.2010.12.024
[2] 孙艳玲, 张家瑞, 鲁振中. 拉盖尔-高斯涡旋光束在水下湍流中的传输特性[J]. 光学学报, 2019, 39(10): 1001005. doi: 10.3788/AOS201939.1001005
Sun Y L, Zhang J R, Lu Z Z. Propagation characteristics of Laguerre-Gaussian vortex beams in underwater turbulence[J]. Acta Opt Sin, 2019, 39(10): 1001005. doi: 10.3788/AOS201939.1001005
[3] Xia T, Liu D J, Dong A Y, et al. Properties of partially coherent elegant Laguerre-Gaussian beam in free space and oceanic turbulence[J]. Optik, 2020, 201: 163514. doi: 10.1016/j.ijleo.2019.163514
[4] Wen W, Wang Z B, Qiao C H. Beam propagation quality factor of airy laser beam in oceanic turbulence[J]. Optik, 2022, 252: 168428. doi: 10.1016/j.ijleo.2021.168428
[5] Liu X Y, Zhou G Q, Shen Y T. Effect of oceanic turbulence with anisotropy on the propagation of multi-sinc Schell-model beams[J]. Results Phys, 2022, 36: 105447. doi: 10.1016/j.rinp.2022.105447
[6] Fu Y, Cao J C, Yamanouchi K, et al. Air-laser-based standoff coherent Raman spectrometer[J]. Ultrafast Sci, 2022, 2022: 9867028. doi: 10.34133/2022/9867028
[7] Ye P, Oldal L G, Csizmadia T, et al. High-flux 100 kHz attosecond pulse source driven by a high-average power annular laser beam[J]. Ultrafast Sci, 2022, 2022: 9823783. doi: 10.34133/2022/9823783
[8] 侯冬, 任军委, 郭广坤, 等. 高精度水下激光频率传递研究进展[J]. 光电工程, 2023, 50(2): 220149. doi: 10.12086/oee.2023.220149
Hou D, Ren J W, Guo G K, et al. Progress on high-precision laser-based underwater frequency transfer[J]. Opto-Electron Eng, 2023, 50(2): 220149. doi: 10.12086/oee.2023.220149
[9] 张雨凡, 李鑫, 吕伟超, 等. 水下无线光通信链路构成与性能优化进展[J]. 光电工程, 2020, 47(9): 190734. doi: 10.12086/oee.2020.190734
Zhang Y F, Li X, Lv W C, et al. Link structure of underwater wireless optical communication and progress on performance optimization[J]. Opto-Electron Eng, 2020, 47(9): 190734. doi: 10.12086/oee.2020.190734
[10] 夏金泽, 孙浩铭, 胡盛辉, 等. 基于图像信息约束的三维激光点云聚类方法[J]. 光电工程, 2023, 50(2): 220148. doi: 10.12086/oee.2023.220148
Xia J Z, Sun H M, Hu S H, et al. 3D laser point cloud clustering method based on image information constraints[J]. Opto-Electron Eng, 2023, 50(2): 220148. doi: 10.12086/oee.2023.220148
[11] 王明军, 李乐, 易芳, 等. 模拟真实水体环境下目标激光点云数据的三维重建与分析[J]. 中国激光, 2022, 49(3): 0309001. doi: 10.3788/CJL202249.0309001
Wang M J, Li L, Yi F, et al. Three-dimensional reconstruction and analysis of target laser point cloud data under simulated real water environment[J]. Chin J Lasers, 2022, 49(3): 0309001. doi: 10.3788/CJL202249.0309001
[12] Gilbert G D, Honey R C. Optical turbulence in the sea[J]. Proc SPIE, 1971, 24: 49−56. doi: 10.1117/12.953476
[13] Guo Y J, Trichili A, Alkhazragi O, et al. On the reciprocity of underwater turbulent channels[J]. IEEE Photonics J, 2019, 11(2): 7901909. doi: 10.1109/JPHOT.2019.2898094
[14] Weng Y, Guo Y J, Alkhazragi O, et al. Impact of turbulent-flow-induced scintillation on deep-ocean wireless optical communication[J]. J Lightwave Technol, 2019, 37(19): 5083−5090. doi: 10.1109/JLT.2019.2928465
[15] 卢腾飞, 刘永欣, 吴志军. 涡旋光束在不同盐度的水下湍流中的传输特性的实验研究[J]. 中国光学, 2022, 15(1): 111−118. doi: 10.37188/CO.EN.2021-0001
Lu T F, Liu Y X, Wu Z J. Experimental investigation on propagation characteristics of vortex beams in underwater turbulence with different salinity[J]. Chin Opt, 2022, 15(1): 111−118. doi: 10.37188/CO.EN.2021-0001
[16] Zhang X N, Li S B, Liu W J, et al. Positioning of turbulence-distorted laser spot for underwater optical wireless communication[C]//2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), 2020: 1–6. https://doi.org/10.1109/CSNDSP49049.2020.9249484.
[17] 张晓妮. 水体非均匀特性对无线光定位定向性能的影响[D]. 合肥: 中国科学技术大学, 2021.
Zhang X N. Influence of water non-uniform characteristics on the underwater wireless optical positioning and pointing performances[D]. Hefei: University of Science and Technology of China, 2021.
[18] Eyyuboğlu H T. Estimation of aperture averaged scintillations in weak turbulence regime for annular, sinusoidal and hyperbolic Gaussian beams using random phase screen[J]. Opt Laser Technol, 2013, 52: 96−102. doi: 10.1016/j.optlastec.2013.04.021
-
访问统计
 下载:
下载:

 点击扫一扫
点击扫一扫
图(8)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


