
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要
舰载机飞行试验时,舰上常配备有光电经纬仪测量系统。针对光电经纬仪引导时所遇到引导信息频率低、存在干扰的问题,提出了数据预测的外推内插法和粗差剔除的三点截止法;为了平滑切换引导源,提出了渐进式跟踪算法。实际数据比对表明,上述方法有效地解决了舰载复杂环境下的数据滤波、插值和多源信息的引导问题。最后,基于舰载GPS/INS组合惯导信息,推导出动基座光电目标引导算法公式。

Abstract
The warship is generally equipped with photoelectric theodolite in carrier-borne aircraft flying test. Due to the low frequency of guidance source signal and disturbance from environment, the performance of the system is restricted. We proposed an extrapolation-interpolation method and a three points cut-off method to solve the problem, respectively. To smooth the switch of different guidance sources, we also recommended a gradually tracking algorithm. All the methods above resolve data filter, interpolation and multi-source problem effectively, which are usually encountered in the guiding photoelectric theodolite on the shipboard. At last, the guidance formulae of moving platform are established based on GPS/INS navigation information.
-
Key words:
- flight test /
- photoelectric theodolite /
- moving base /
- outlier /
- guidance algorithm
-
Overview

Abstract: In order to accurately measure the trajectory and characteristic points of the carrier borne aircraft during the flight test, the shipborne photoelectric theodolite is adopted. According to the target position information and the video image information measured by the observation system, the solution is obtained in the deck coordinate system for the accurate trajectory of the target. However, due to the influence of the weather, the distance is short and the field of view is small. When the aircraft enters its working area, it is often too late to be tracked. Related research report is relatively small. In order to solve this problem, according to the ship and aircraft equipped with infrared guide, mutual guide and guide work, when a target signal appears, primary mirror of theodolite is guided to aim target direction. Once the target runs into the test area, it will be timely captured. The warship is generally equipped with photoelectric theodolite in shipboard plane flying test. Flight test equipment configuration of the aircraft is equipped with a real-time GPS system, and the ship is equipped with telemetry system, and therefore the project uses an external guide work.
According to the environment caused by theodolite data source interference and low data sending rate, the guidance algorithm of moving optoelectronic target under complex environment is proposed to solve the problem of photoelectric theodolite stability guidance. The GPS with three organic loading error cutoff methods is adjusted by extrapolation prediction data interpolation method, incremental tracking algorithm source guide smooth switching and coordinate transformation algorithm. Several algorithms are successfully applied to the project, and achieve good results.
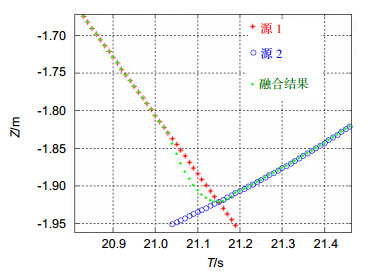
In flight test, there are two sources of guidance: airborne GPS data and telemetry data sent by the network. Airborne GPS positioning system through the wireless data chain under the plane cause the ship affected by the electromagnetic environment and the plane distance. Pose variation and occlusion of wireless data link bandwidth and limited data issued by the noise pollution and low frequency eliminate the coordinate transmission conversion error after using three points method of gross error on the received data of coordinate conversion for the first time. The remote sensing system sends the guide data. The frequency is high, and the data is stable. The threshold method is used to remove the outliers and then participates in the guidance calculation. Aiming at the problem of guidance source signal low frequency and interference, thesis puts forward an extrapolation-interpolation method and a three points cut-off method, respectively. Thesis also puts forward gradually tracking algorithm for the smooth transition of guidance sources. The methods all above resolve effectively data filter, interpolation and multi-source problem which are encountered in the guiding photoelectric theodolite on the shipboard. The last moving base photoelectric equipment guidance formulae are educed based on GPS/INS integrated navigation information.
-

-
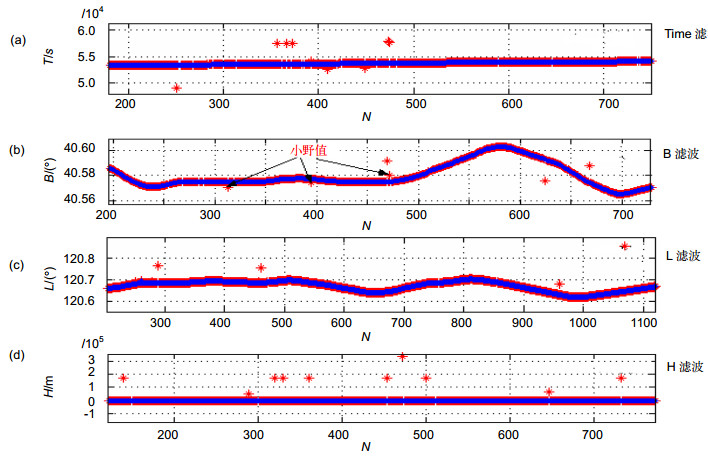
图 1 三点截止法剔除野值. (a)时间. (b)纬度数据. (c)经度数据. (d)高程数据.
Figure 1. Three points cut-off method to eliminate outliers. (a) Time. (b) Latitude data. (c) Longitude data. (d) Altitude data.
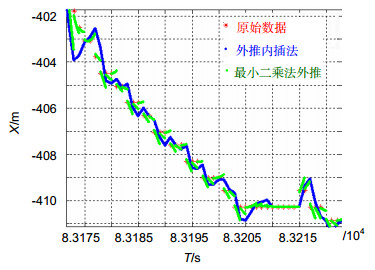
图 2 外推内插法与最小二乘法外推.
Figure 2. Extrapolation-interpolation method and the least squares extrapolation.
-
参考文献
[1] Zhang Zi, Hu Yucong, Zhang Chuanchun, et al. Designing parking guidance information system based on internet of things[J]. Applied Mechanics and Materials, 2014, 668–669: 1263–1268. doi: 10.4028/www.scientific.net/AMM.668-669
[2] Yao Zhiqiang, Zhu Hengjun, Du Wenhe. Design and implementation of automated warehouse monitoring system based on the internet of things[J]. Applied Mechanics and Materials, 2014, 543–547: 1099–1102. doi: 10.4028/www.scientific.net/AMM.543-547
[3] Zhou Fengli, Li Qing. Parking guidance system based on ZigBee and geomagnetic sensor technology[C]// Proceedings of 2014 13th International Symposium on Distributed Computing and Applications to Business, Engineering and Science, 2014: 268–271.
[4] Patil M, Reddy S R N. Design and implementation of home/ office automation system based on wireless technologies[J]. International Journal of Computer Applications, 2014, 79: 19–22. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.403.2179
[5] 侯海啸.基于遥测PCM接收通道的光电经纬仪外引导[J].光电工程, 2015, 42(7): 36–41. http://www.cnki.com.cn/Article/CJFDTotal-GDGC201507008.htm
Hou Haixiao. External Guide For Photoelectric Theodolite Based on Telemetry PCM Receiving Channel[J]. Opto-Electronic Engineering, 2015, 42(7): 36–41. http://www.cnki.com.cn/Article/CJFDTotal-GDGC201507008.htm
[6] Li Fengmei, Wei Yaoguang, Chen Yingyi, et al. System design of online monitoring and controlling system based on Zigbee in greenhouse[M]// Li D, Chen Y. Computer and Computing Technologies in Agriculture VIII. CCTA 2014. IFIP Advances in Information and Communication Technology, Cham, 2015, 452: 702–713.
[7] 杨廷梧, 张正中.航空飞行试验光电测量理论与方法[M].北京:国防工业出版社, 2014: 71–77.
Yang Tingwu, Zhang Zhengzhong. Optical-Electronic Measurement Theory and Methods in Flight Test[M]. Beijing: National Defense Industry Publishing House, 2014: 71–77.
[8] Qiu Weimin, Dong Linxi, Wang Fei, et al. Design of intelligent greenhouse environment monitoring system based on ZigBee and embedded technology[C]// Proceedings of IEEE Interna-tional Conference on Consumer Electronics-China, 2015: 1–3.
[9] 晏晖, 吴衡, 胡丙华.无激光测距的动平台经纬仪单站精确测量[J].光电工程, 2014, 41(4): 30–34. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201404005
Yan Hui, Wu Heng, Hu Binghua. Precise Measurement by Single Theodolite on Moving Platform without Laser Ranging [J]. Opto-Electronic Engineering, 2014, 41(4): 30–34. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201404005
[10] 张杰, 王京海, 石磊, 等.一种经纬仪自准直姿态实时测量方法[J].光电工程, 2015, 42(5): 39–44. http://www.cnki.com.cn/Article/CJFDTotal-GDGC201505008.htm
Zhang Jie, Wang Jinghai, Shi Lei, et al. The Research of Real-time Attitude Measurement Based on Theodolite by Using Auto collimation[J]. Opto-Electronic Engineering, 2015, 42(5): 39-44. http://www.cnki.com.cn/Article/CJFDTotal-GDGC201505008.htm
[11] Wang Kaikai, Sun Kelin, Zhou Pei. Implementation of the photoelectric theodolite image real-time compression[J]. Microcomputer & its Applications, 2014, 33(16): 31–33. http://www.en.cnki.com.cn/Article_en/CJFDTotal-WXJY201416012.htm
[12] Li Guoyou, Fu Chengyu, He Peilong, et al. The method of miss distance measurement based on coordinate operation of radar and photoelectric theodolite[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2014, 34(2): 168–171. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_djyzdxb201402046
[13] Tabatabaeifar A, Shafieian M A, Banizaman H, et al. Design and implementation of a web-based greenhouse remote monitoring system with zigbee protocol and GSM network [J]. Journal of Intelligent Procedures in Electrical Technology, 2014, 5(19): 71–79. http://www.ingentaconnect.com/content/doaj/23223871/2014/00000005/00000019/art00015
[14] Sultan Mahmud Rana G M, Khan A A M, Hoque M N, et al. Design and implementation of a GSM based remote home security and appliance control system[C]// International Conference on Advances in Electrical Engineering, 2014: 291–295.
[15] Hasan R, Khan M M, Ashek A, et al. Microcontroller Based Home Security System with GSM Technology[J]. Open Journal of Safety Science & Technology, 2015, 5(6): 55–62. http://www.researchgate.net/publication/278684556_Microcontroller_Based_Home_Security_System_with_GSM_Technology
-
访问统计
 下载:
下载:
 点击扫一扫
点击扫一扫
图(3)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


