
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
河道漂浮物检测对于船舶自动驾驶以及河道清理有着重大意义,但现有的方法在针对河道漂浮物目标尺寸小且互相遮挡、特征信息少时出现检测精度低等问题。为解决这些问题,本文基于YOLOv7,提出了一种改进模型PAW-YOLOv7。首先,为了提高网络模型对小目标的特征表达能力,构建了小目标物体检测层,并将自注意力和卷积混合模块 (ACmix)集成应用于新构建的小目标检测层;其次,为了减少复杂背景的干扰,采用全维动态卷积 (ODConv)代替颈部的卷积模块,使网络具有捕获全局上下文信息能力;最后,将PConv (partial convolution)模块融入主干网络,替换部分标准卷积,同时采用WIoU (Wise-IoU)损失函数取代CIoU,实现网络模型计算量的降低,提高网络检测速度,同时增加对低质量锚框的聚焦能力,加快模型收敛速度。实验结果表明,PAW-YOLOv7算法在本文利用数据扩展技术改进的FloW-Img数据集上的检测精度达到89.7%,较原YOLOv7提升了9.8%,且检测速度达到54帧/秒 (FPS),在自建的稀疏漂浮物数据集上的检测精度比YOLOv7提高了3.7%,能快速准确地检测河道微小漂浮物,同时也具有较好的实时检测性能。
-
关键词:
- YOLOv7 /
- 漂浮物检测 /
- 混合卷积自注意力机制 /
- 全维动态卷积 /
- Wise-IoU损失函数
Abstract:Detection of floating debris in rivers is of great significance for ship autopilot and river cleaning, but the existing methods in targeting floating objects in the river with small target sizes and mutual occlusion, and less feature information lead to low detection accuracy. To address these problems, this paper proposes a small target object detection method called PAW-YOLOv7 based on YOLOv7. Firstly, in order to improve the feature expression ability of the small target network model, a small target object detection layer is constructed, and the self-attention and convolution hybrid module (ACmix) is integrated and applied to the newly constructed small target detection layer. Secondly, in order to reduce the interference of the complex background, the Omni-dimensional dynamic convolution (ODConv) is used instead of the convolution module in the neck, so as to give the network the ability to capture the global contextual information. Finally, the PConv (partial convolution) module is integrated into the backbone network to replace part of the standard convolution, while the WIoU (Wise-IoU) loss function is used to replace the CIoU. It achieves the reduction of network model computation, improves the network detection speed, and increases the focusing ability on the low-quality anchor frames, accelerating the convergence speed of the model. The experimental results show that the detection accuracy of the PAW-YOLOv7 algorithm on the FloW-Img dataset improved by the data extension technique in this paper reaches 89.7%, which is 9.8% higher than that of the original YOLOv7, the detection speed reaches 54 frames per second (FPS), and the detection accuracy on the self-built sparse floater dataset improves by 3.7% compared with that of YOLOv7. It is capable of detecting the tiny floating objects in the river channel quickly and accurately, and also has a better real-time detection performance.
-
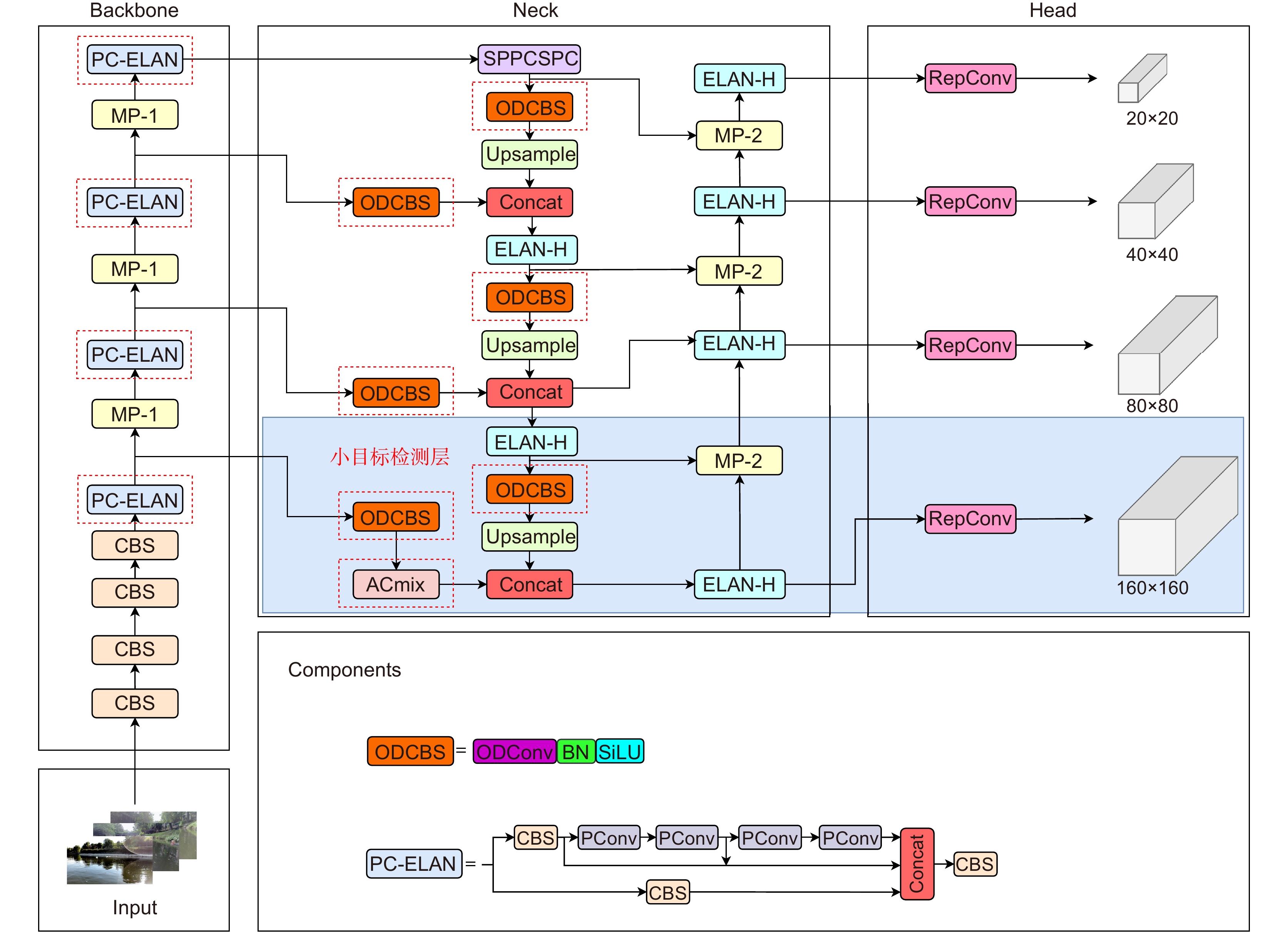
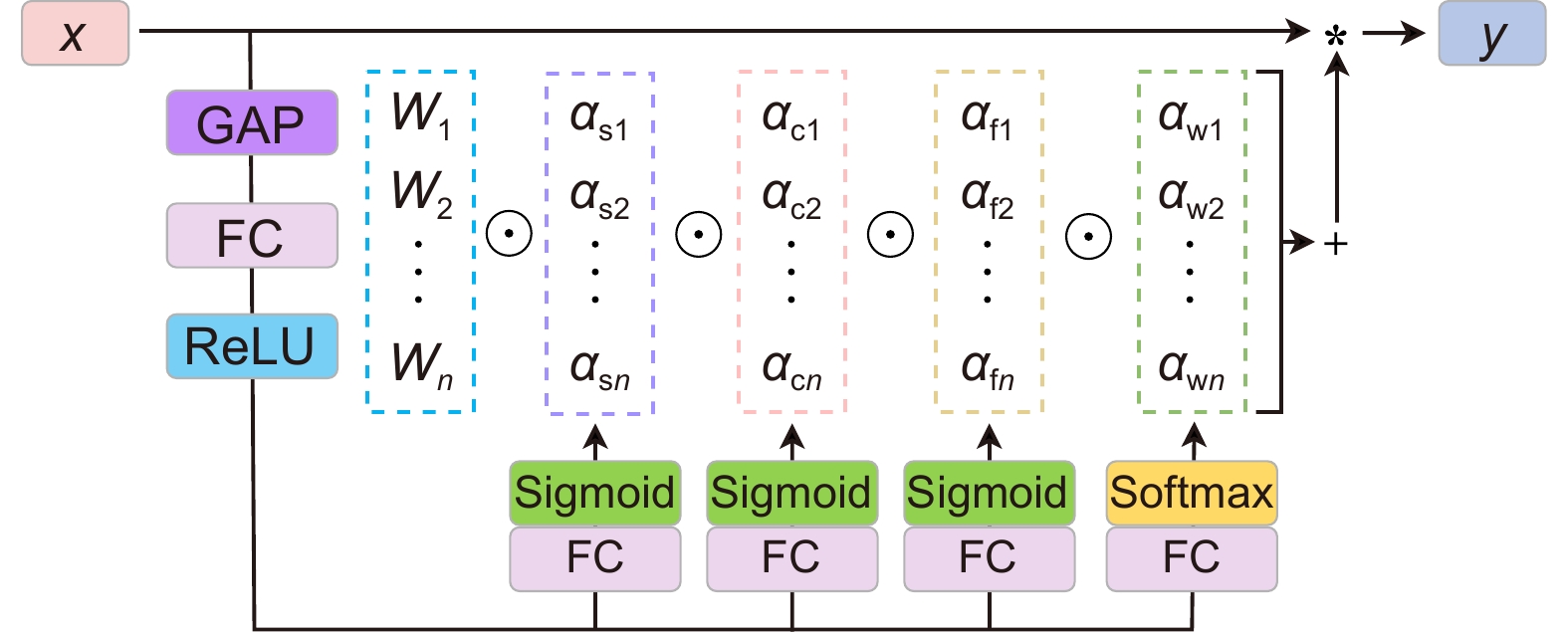
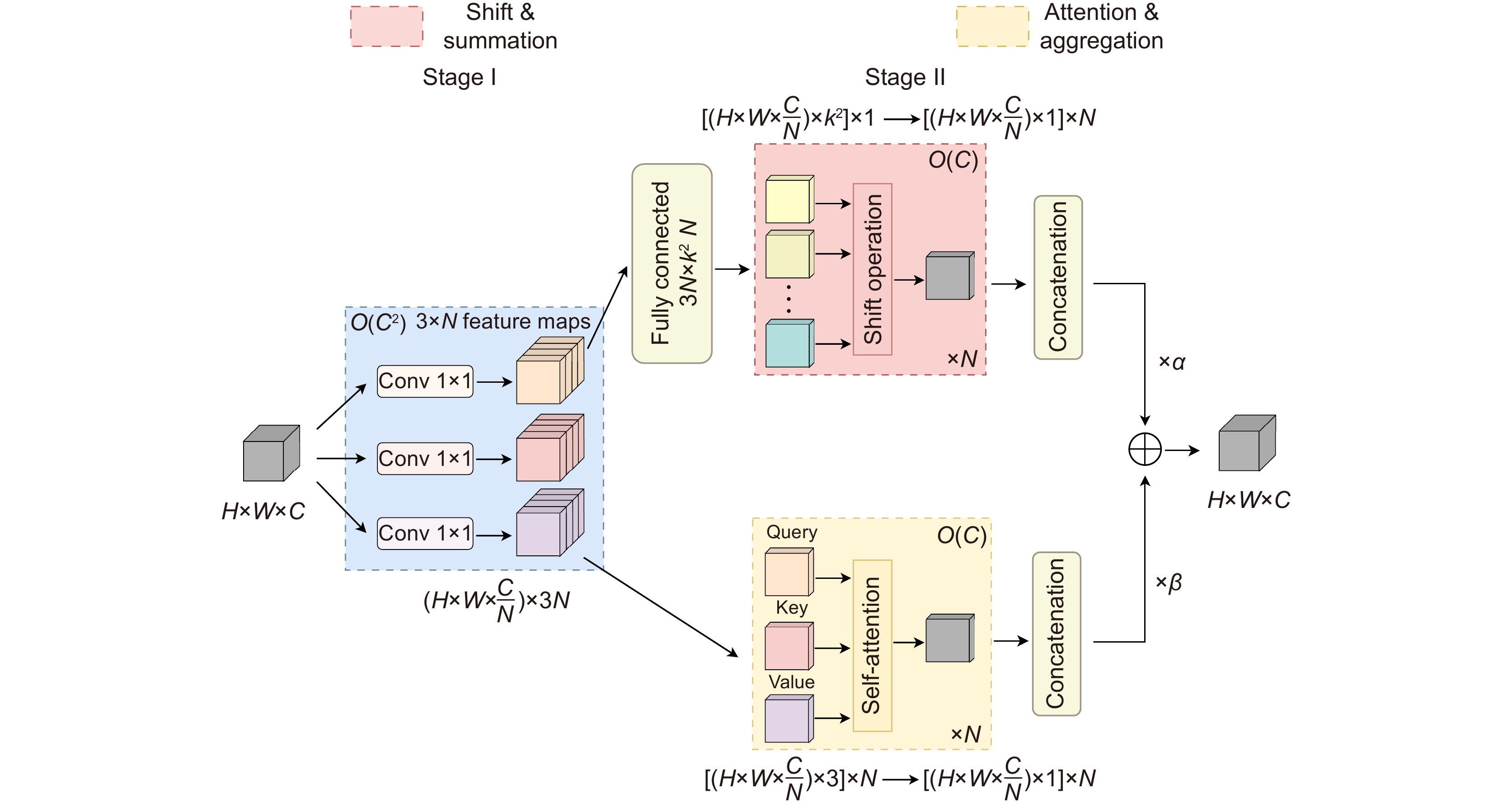
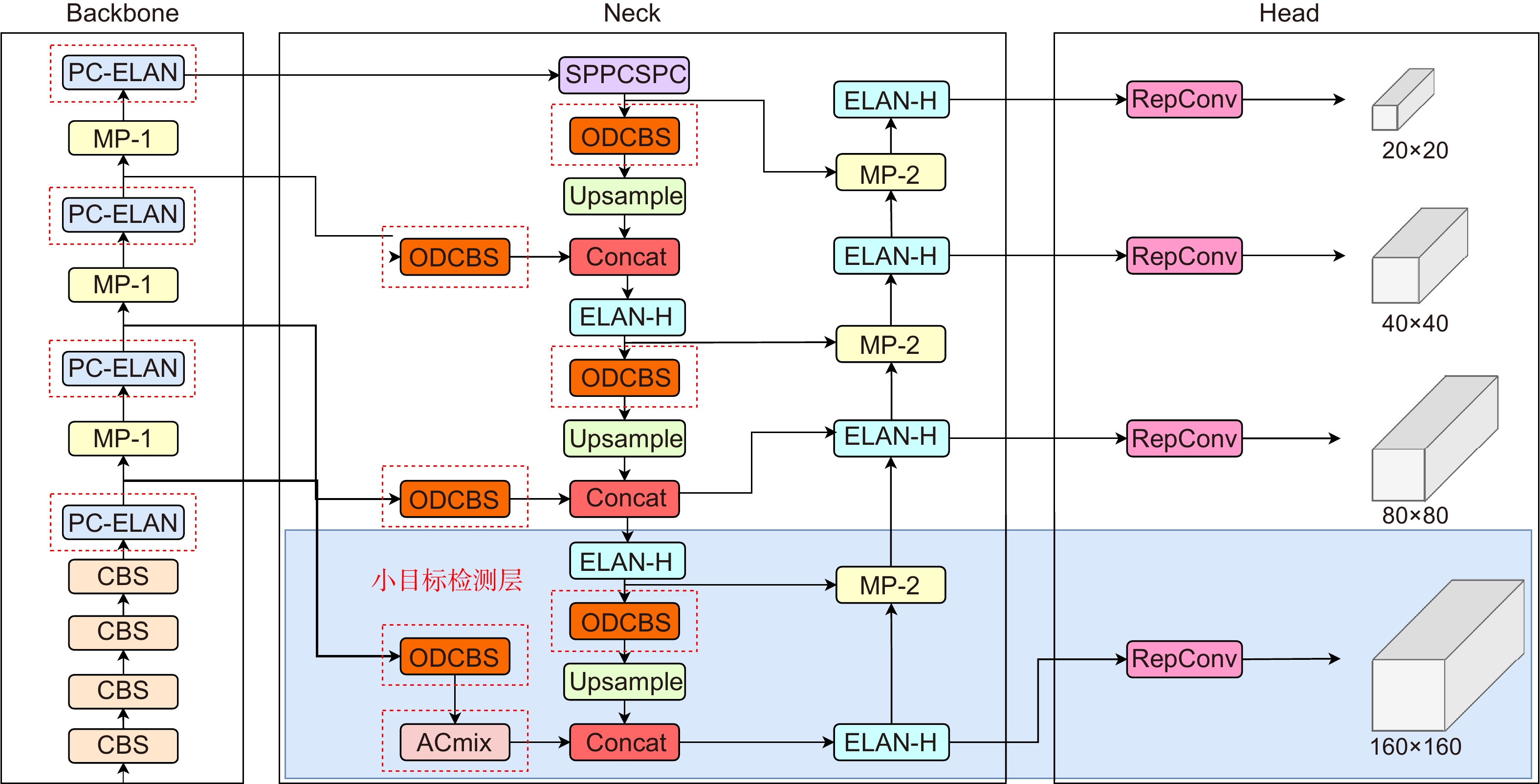
Overview: In recent years, with the continuous development of deep learning technology, target detection has achieved unprecedented results in the field of computer vision and has been applied to a large number of scenarios, such as intelligent driving, rescue activities, and motion data analysis. In many target detection tasks, river float detection is of great significance for automatic ship driving and river cleaning, at present, target detection has a better performance in medium and large target detection, but the accuracy and real-time performance in the face of detection of tiny floats in the river is poor and the model volume is large. Since the detection of tiny floating objects in the river channel mainly faces the problems of small target size, little feature information, uneven dispersion, and serious background interference of floating objects on the water surface, the existing methods have a good performance in target detection of small floating objects in the river channel. Existing methods for the detection of floating objects in the river channel will face these difficulties such as low detection accuracy, leakage and false detection, bad real-time, and other problems. In order to solve these problems, this paper proposes an improved river small target detection model PAW-YOLOv7 based on YOLOv7. Firstly, in order to improve the feature expression ability of the network model for small targets, a small target object detection layer is constructed, a 160×160-size output is added, and self-attention and convolutional mixing module (ACmix) is integrated and applied to the newly constructed small target detection layer to achieve the effect of enhancing the model's feature perception and location information of distant small targets. Secondly, to reduce the interference of complex backgrounds, the new ODCBS module is constructed by using Omni-dimensional dynamic convolution (ODConv) instead of the convolution module of the neck, and the attention value is analyzed and learned from the spatial dimension of the convolution kernel, the dimension of the input channel, and the dimension of the output channel, respectively, in each part of the convolutional layer to enable the network to effectively capture richer contextual information. Finally, the PConv (partial convolution) module is integrated into the backbone network to replace part of the standard convolution, while the WIoU (Wise-IoU) loss function is used to replace the CIoU, to realize a reduction in the computation of the network model, improve the network detection speed, and at the same time, increase the low-quality anchor frames' focusing ability, and accelerate the model convergence speed. The experimental results show that the detection accuracy of the PAW-YOLOv7 algorithm on the FloW-Img dataset improved by the data extension technique used in this paper reaches 89.7%, which is 9.8% higher than that of the original YOLOv7. The detection speed reaches 54 frames per second (FPS), and the detection accuracy on the self-constructed sparse floater dataset improves by 3.7% compared with that of YOLOv7. It can quickly and accurately detect tiny floating objects in the river channel and also has better real-time detection performance. Finally, compared with the mainstream detection methods, the method in this paper has the best comprehensive effect.
-

-
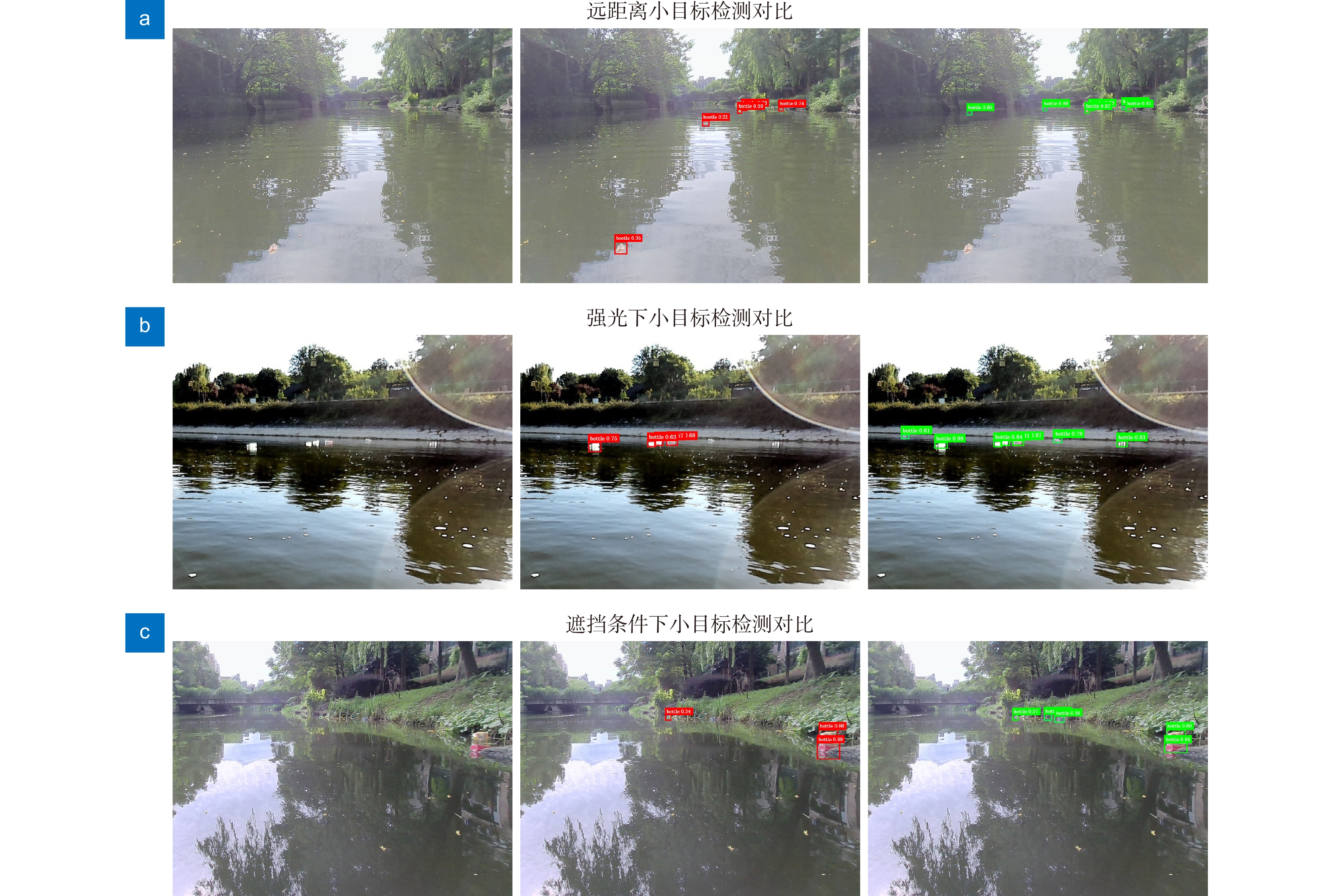
图 8 不同场景下不同算法目标检测结果。 (左)检测图片; (中) YOLOv7模型; (右)本文算法
Figure 8. Target detection results of different algorithms in different scenes. Left: detection image, Center: YOLOv7 model, Right: algorithm of this paper
表 1 消融实验结果
Table 1. Results of ablation experiments
组别 Head ACmix ODCBS WIoU PC-ELAN mAP/% FLOPs/G FPS 1 79.9 105.4 101 2 √ 81.1 119.5 86 3 √ 85.6 101.6 75 4 √ 80.8 109.8 97 5 √ 81.5 105.4 108 6 √ 78.1 83.7 124 7 √ √ 87.3 115.3 56 8 √ √ √ 88.2 119.2 47 9 √ √ √ √ 90.8 119.2 48 10 √ √ √ √ √ 89.7 97.8 54  下载: 导出CSV
下载: 导出CSV
表 2 FloW-Img数据集各算法对比实验数据
Table 2. Comparative experimental data of each algorithm on FloW-Img dataset
算法 mAP/% FPS FLOPs/G Params/M SSD 73.3 71 78.4 26.3 Faster R-CNN 76.8 63 75.1 137.1 YOLOv3 85.7 125 96.3 61.5 YOLOv5s 84.1 236 64.7 10.7 TPH-YOLOv5 82.3 69 125.6 26.1 YOLOv7 79.9 101 105.4 37.2 YOLOv8l 86.4 117 155.4 43.6 PAW-YOLOv7 89.7 54 97.8 25.4
下载: 导出CSV
表 3 自建数据集各算法对比实验数据
Table 3. Comparative experimental data of each algorithm on self-constructed dataset
算法 mAP/% FPS FLOPs/G Params/M SSD 57.9 67 78.4 26.3 Faster R-CNN 61.3 61 75.1 137.1 YOLOv3 59.7 137 96.3 61.5 YOLOv5s 66.5 242 64.3 10.7 TPH-YOLOv5 63.7 74 125.6 26.1 YOLOv7 68.1 98 105.1 37.2 YOLOv8l 65.9 106 155.4 43.6 PAW-YOLOv7 71.8 68 97.7 25.4
下载: 导出CSV
-
[1] Yan L, Yamaguchi M, Noro N, et al. A novel two-stage deep learning-based small-object detection using hyperspectral images[J]. Opt Rev, 2019, 26(6): 597−606. doi: 10.1007/s10043-019-00528-0
[2] 朱豪, 周顺勇, 刘学, 等. 基于深度学习的单阶段目标检测算法综述[J]. 工业控制计算机, 2023, 36(4): 101−103.
Zhu H, Zhou S Y, Liu X, et al. Survey of single-stage object detection algorithms based on deep learning[J]. Ind Control Comput, 2023, 36(4): 101−103.
[3] Girshick R. Fast R-CNN[C]//Proceedings of the 2015 IEEE International Conference on Computer Vision, 2015: 1440–1448. https://doi.org/10.1109/ICCV.2015.169.
[4] Ren S Q, He K M, Girshick R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Trans Patt Anal Mach Intellig, 2017, 39(6): 1137−1149. doi: 10.1109/TPAMI.2016.2577031
[5] Liu W, Anguelov D, Erhan D, et al. SSD: single shot MultiBox detector[C]//Proceedings of the 14th European Conference on Computer Vision, 2016: 21–37. https://doi.org/10.1007/978-3-319-46448-0_2.
[6] Redmon J, Farhadi A. YOLOv3: An incremental improvement[Z]. arXiv: 1804.02767, 2018. https://doi.org/10.48550/arXiv.1804.02767.
[7] Bochkovskiy A, Wang C Y, Liao H Y M. YOLOv4: optimal speed and accuracy of object detection[Z]. arXiv: 2004.10934, 2020. https://doi.org/10.48550/arXiv.2004.10934.
[8] Zhu X K, Lyu S C, Wang X, et al. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios[C]//Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops, 2021: 2778–2788. https://doi.org/10.1109/ICCVW54120.2021.00312.
[9] 马梁, 苟于涛, 雷涛, 等. 基于多尺度特征融合的遥感图像小目标检测[J]. 光电工程, 2022, 49(4): 210363. doi: 10.12086/oee.2022.210363
Ma L, Gou Y T, Lei T, et al. Small object detection based on multi-scale feature fusion using remote sensing images[J]. Opto-Electron Eng, 2022, 49(4): 210363. doi: 10.12086/oee.2022.210363
[10] Zhang Y, Sun Y P, Wang Z, et al. YOLOv7-RAR for urban vehicle detection[J]. Sensors, 2023, 23(4): 1801. doi: 10.3390/s23041801
[11] 陈旭, 彭冬亮, 谷雨. 基于改进YOLOv5s的无人机图像实时目标检测[J]. 光电工程, 2022, 49(3): 210372. doi: 10.12086/oee.2022.210372
Chen X, Peng D L, Gu Y. Real-time object detection for UAV images based on improved YOLOv5s[J]. Opto-Electron Eng, 2022, 49(3): 210372. doi: 10.12086/oee.2022.210372
[12] 陆康亮, 薛俊, 陶重犇. 融合空间掩膜预测与点云投影的多目标跟踪[J]. 光电工程, 2022, 49(9): 220024. doi: 10.12086/oee.2022.220024
Lu K L, Xue J, Tao C B. Multi target tracking based on spatial mask prediction and point cloud projection[J]. Opto-Electron Eng, 2022, 49(9): 220024. doi: 10.12086/oee.2022.220024
[13] Xiao Z, Wan F, Lei G B, et al. FL-YOLOv7: a lightweight small object detection algorithm in forest fire detection[J]. Forests, 2023, 14(9): 1812. doi: 10.3390/f14091812
[14] Sun Y, Yi L, Li S, et al. PBA-YOLOv7: an object detection method based on an improved YOLOv7 network[J]. Appl Sci, 2023, 13(18): 10436. doi: 10.3390/app131810436
[15] Pan X R, Ge C J, Lu R, et al. On the integration of self-attention and convolution[C]//Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 805–815. https://doi.org/10.1109/CVPR52688.2022.00089.
[16] Li C, Zhou A J, Yao A B. Omni-dimensional dynamic convolution[C]//The Tenth International Conference on Learning Representations, 2022.
[17] Chen J R, Kao S H, He H, et al. Run, Don’t walk: chasing higher FLOPS for faster neural networks[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 12021–12031. https://doi.org/10.1109/CVPR52729.2023.01157.
[18] Tong Z J, Chen Y H, Xu Z W, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism[Z]. arXiv: 2301.10051, 2023. https://doi.org/10.48550/arXiv.2301.10051.
[19] Lee Y, Hwang J W, Lee S, et al. An energy and GPU-computation efficient backbone network for real-time object detection[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2019: 752–760. https://doi.org/10.1109/CVPRW.2019.00103.
[20] Wang C Y, Liao H Y M, Wu Y H, et al. CSPNet: A new backbone that can enhance learning capability of CNN[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2020: 1571–1580. https://doi.org/10.1109/CVPRW50498.2020.00203.
[21] Chollet F. Xception: deep learning with depthwise separable convolutions[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017: 1800–1807. https://doi.org/10.1109/CVPR.2017.195.
[22] Han K, Wang Y H, Tian Q, et al. GhostNet: more features from cheap operations[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020: 1577–1586. https://doi.org/10.1109/CVPR42600.2020.00165.
[23] Yang B, Bender G, Le Q V, et al. CondConv: conditionally parameterized convolutions for efficient inference[C]//Proceedings of the 33rd International Conference on Neural Information Processing Systems, 2019: 117.
[24] Hu J, Shen L, Sun G. Squeeze-and-excitation networks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018: 7132–7141. https://doi.org/10.1109/CVPR.2018.00745.
[25] Woo S, Park J, Lee J Y, et al. CBAM: convolutional block attention module[C]//15th European Conference on Computer Vision, 2018: 3–19. https://doi.org/10.1007/978-3-030-01234-2_1.
[26] Bello I, Zoph B, Le Q, et al. Attention augmented convolutional networks[C]//2019 IEEE/CVF International Conference on Computer Vision (ICCV), 2019: 3285–3294. https://doi.org/10.1109/ICCV.2019.00338.
[27] Rezatofighi H, Tsoi N, Gwak J, et al. Generalized intersection over union: a metric and a loss for bounding box regression[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019: 658–666. https://doi.org/10.1109/CVPR.2019.00075.
[28] Zheng Z H, Wang P, Liu W, et al. Distance-IoU loss: faster and better learning for bounding box regression[C]//Thirty-Seventh AAAI Conference on Artificial Intelligence, 2019. https://doi.org/10.1609/aaai.v34i07.6999.
[29] Gevorgyan Z. SIoU loss: more powerful learning for bounding box regression[Z]. arXiv: 2205.12740, 2022. https://doi.org/10.48550/arXiv.2205.12740.
[30] Cheng Y W, Zhu J N, Jiang M X, et al. FloW: a dataset and benchmark for floating waste detection in inland waters[C]//Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision, 2021: 10933–10942. https://doi.org/10.1109/ICCV48922.2021.01077.
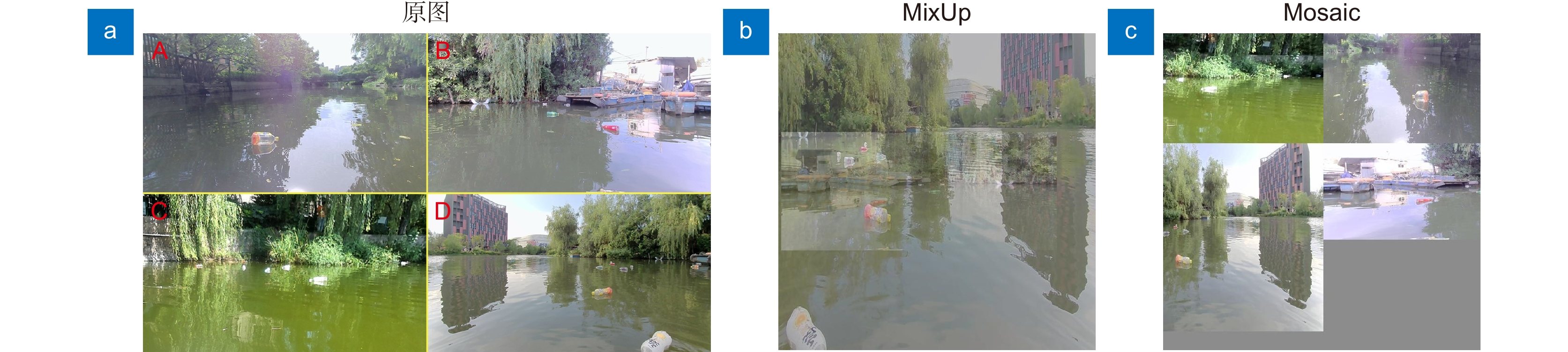
[31] Zhang H Y, Cissé M, Dauphin Y N, et al. mixup: Beyond empirical risk minimization[C]//6th International Conference on Learning Representations, 2017.
-


 点击扫一扫
点击扫一扫
图(11)
表(3)
计量
- 文章访问数: 365
- PDF下载数: 160
- 施引文献: 0


