
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
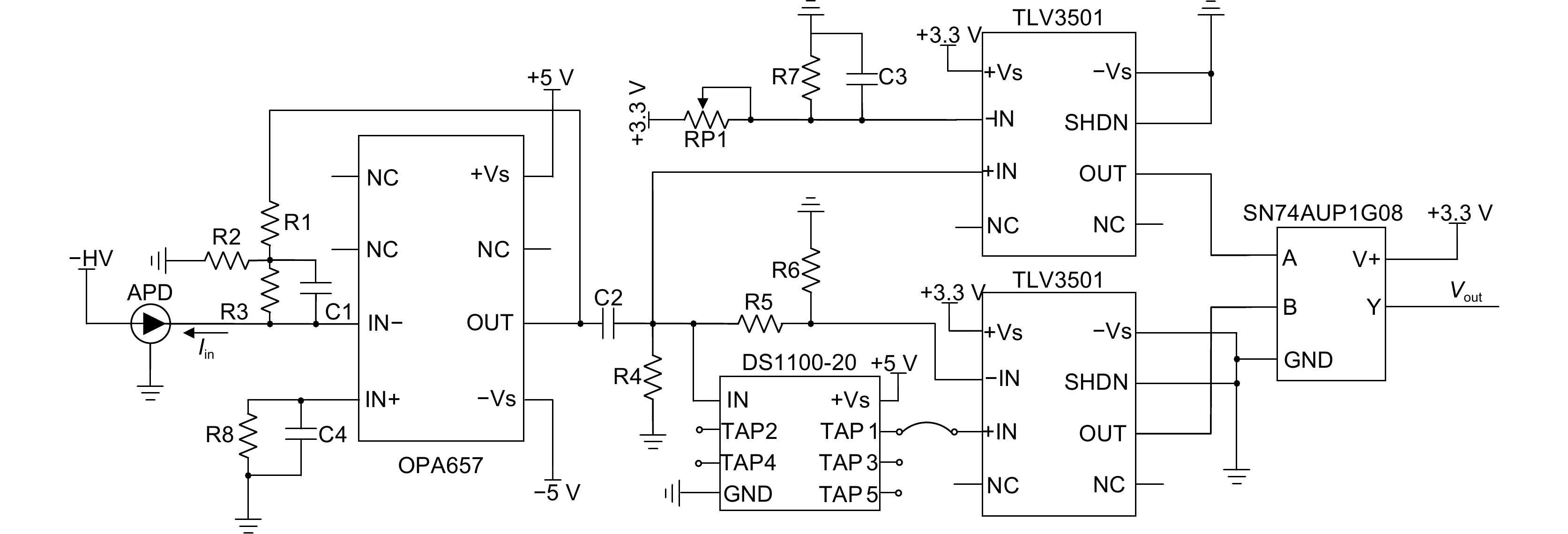
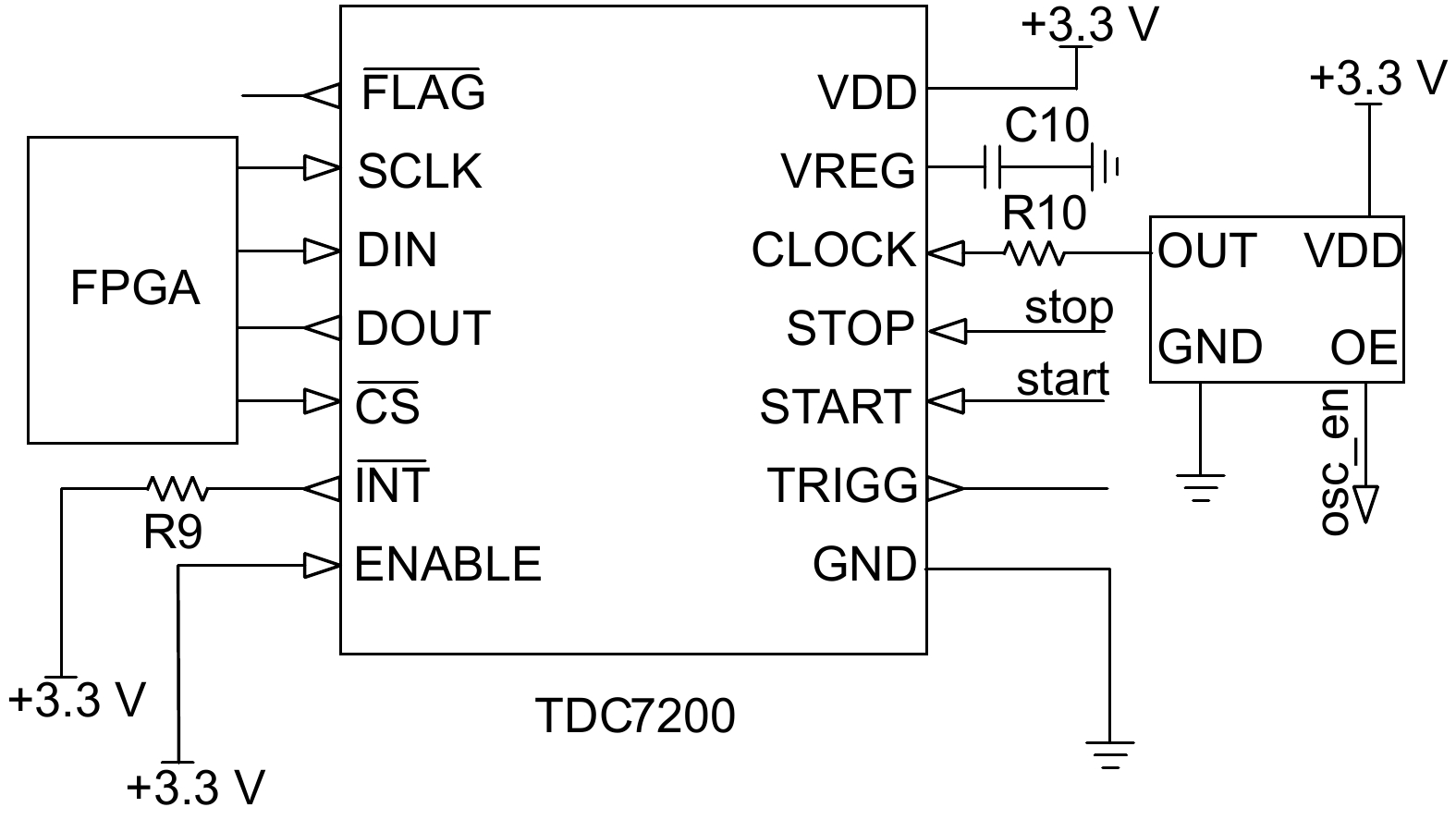
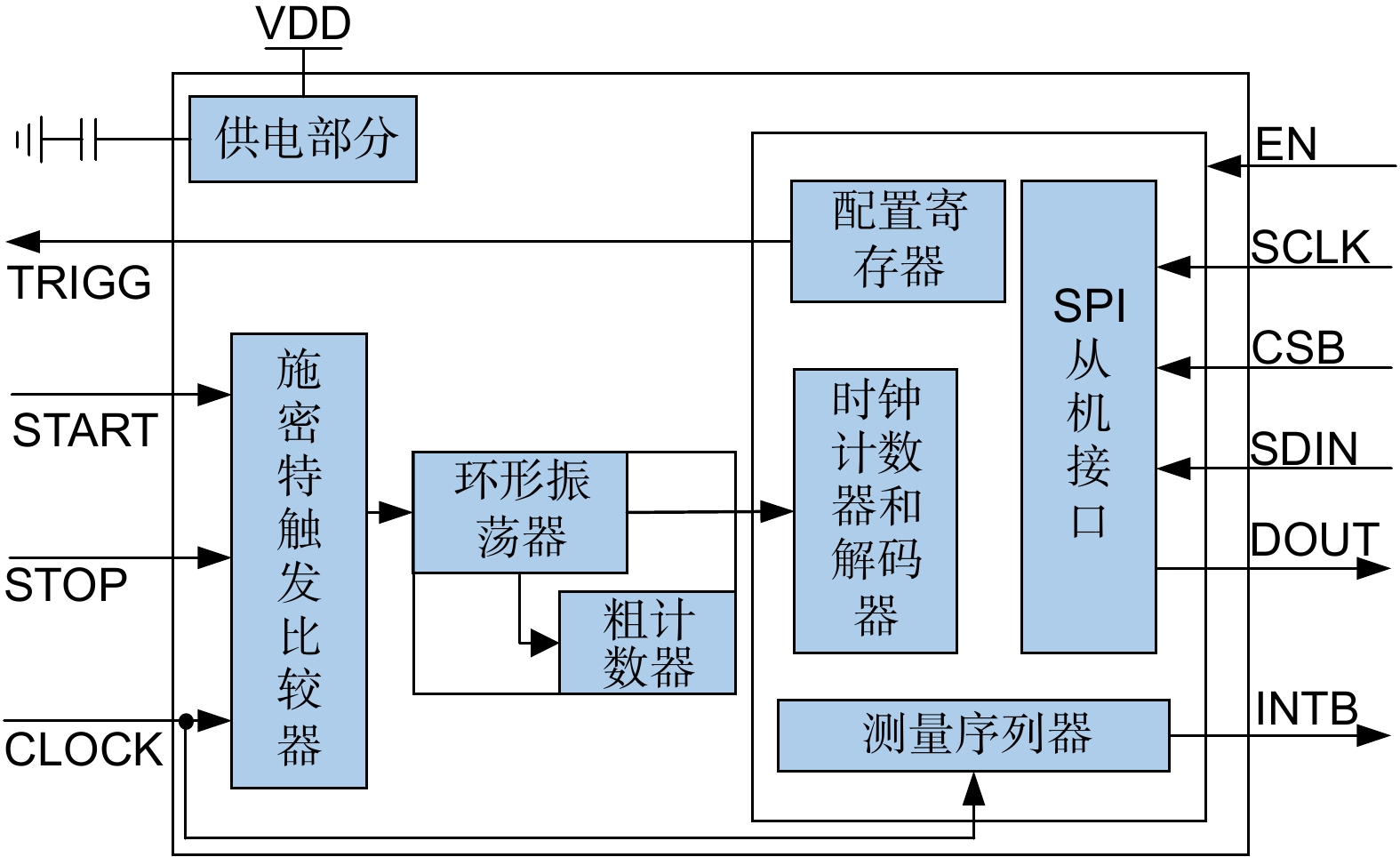
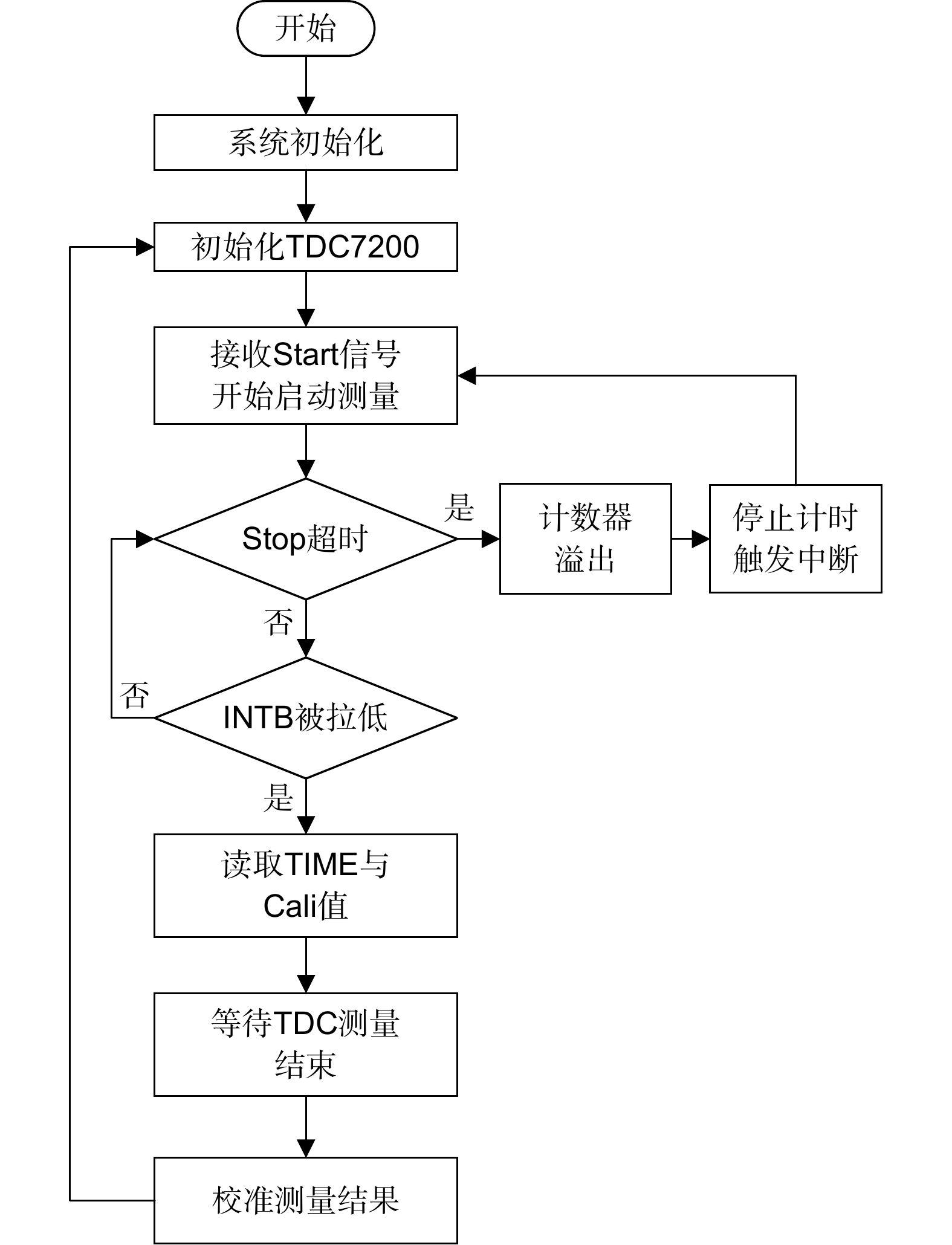
针对1550 nm波段铟镓砷探测器小光敏面无法有效接收MEMS较大扫描视场回波的问题,设计了一种适用于近程宽视场的接收装置。接收端光学系统利用像方远心结构作为接收天线,通过仿真在1 mm的光敏面下实现了36°的接收视场,整体相对照度超过95%,集光性能和通光性能较好。同时,接收电路采用T型网络放大结构,结合时刻鉴别电路,利用TDC7200实现高精度时间测量。实验结果表明,飞行时间测量精度在200 ns量程下小于120 ps,在8 m范围内测距精度优于2 ns,能够满足近程探测的需要。
Abstract:To address the ineffective reception of larger scanning field echoes by the small photosensitive area of the indium gallium arsenide InGaAs detector in the 1550 nm wavelength band, a receiver device suitable for near-range wide field-of-view applications has been designed. The optical system at the receiving end utilizes an afocal telecentric structure as the receiving antenna, achieving a reception field-of-view of 36° at a photosensitive area of 1 mm. The relative illuminance exceeds 95%, demonstrating excellent light collection and transmission characteristics. Additionally, the receiver circuit adopts a T-network amplification structure combined with a moment identification circuit, utilizing the TDC7200 to achieve high-precision time measurements. The flight time measurement accuracy is less than 120 ps within a range of 200 ns, and the experimental results demonstrate ranging accuracy better than 2 ns within an 8 m distance, meeting the requirements for near-range detection.
-
Overview: Compared to detection methods such as cameras and millimeter-wave radar, LiDAR (light detection and ranging) utilizes a highly collimated laser beam to obtain target distance, azimuth, shape, and motion information, providing superior three-dimensional perception capabilities. In the early days, LiDAR was primarily used in military, surveying, environmental monitoring, and other fields, given its large size and high cost. However, LiDAR has gradually integrated into the consumer market and played an increasingly crucial role in autonomous driving and intelligent perception, becoming a hot research topic in recent years. The primary functions of LiDAR can be divided into scanning imaging modules. As weight, size, and power consumption become crucial for platforms such as automobiles and drones, traditional mechanical LiDAR systems are evolving toward solid-state scanning approaches. Among various scanning devices, MEMS (micro-electro-mechanical systems) mirrors have become a hot direction in LiDAR scanning due to their small size, low power consumption, and high angular resolution. With the advancement of LiDAR technology, the scanning field of view of MEMS devices continues to increase, resulting in increasingly stringent requirements for matching the emission and reception fields of view.
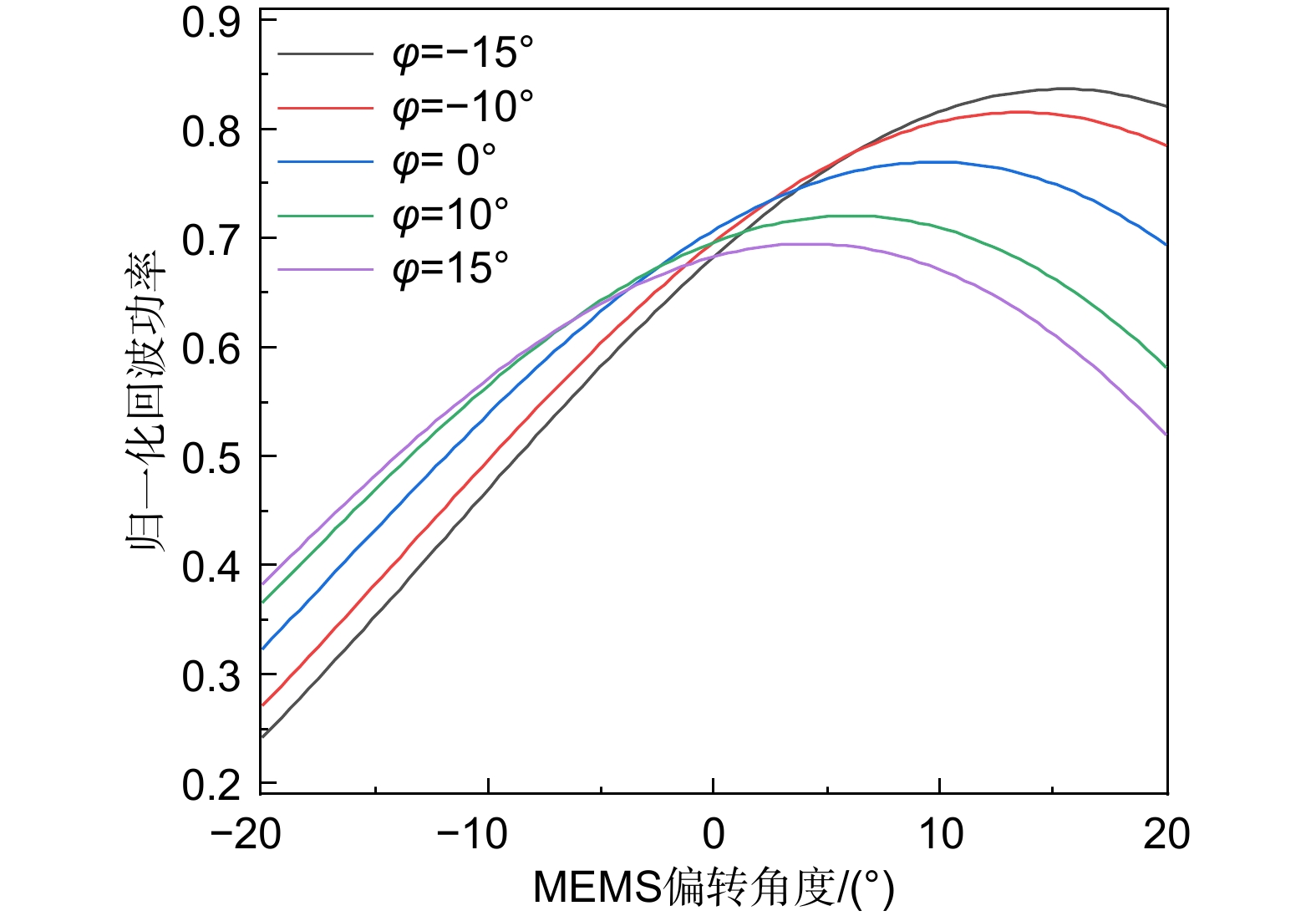
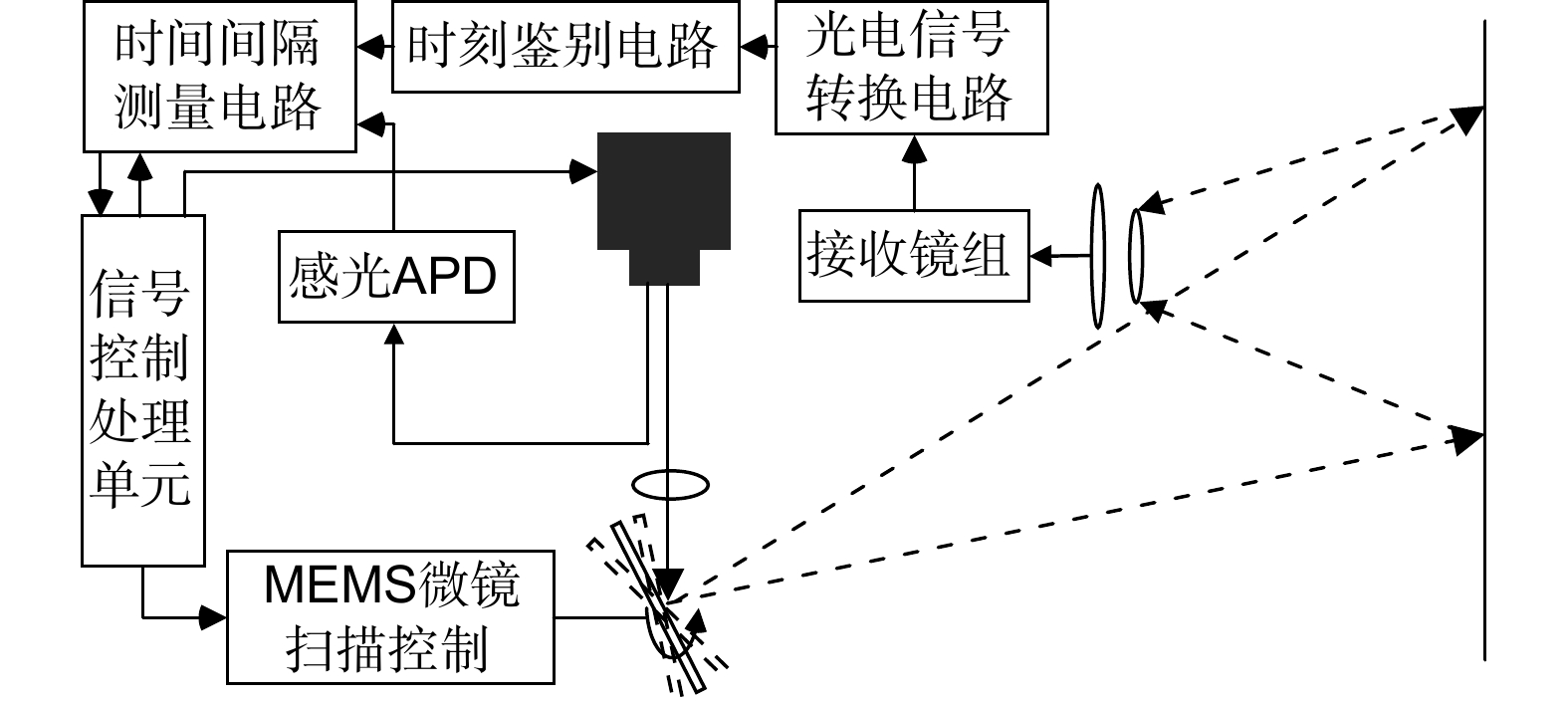
The influence of MEMS deflection angle on the received power was derived based on the laser radar equation in this study. Detailed design specifications for the lidar system were analyzed, along with the achievable detection distance range. A suitable receiving scheme for MEMS-based short-range laser radar was proposed, where a single-piece non-spherical mirror was used for beam collimation at the transmitting end, and a small sensitive area InGaAs detector operating at 1550 nm was employed at the receiving end to address the problem of inefficient echo reception for larger scanning fields of the MEMS system. A receiver device suitable for near-range wide field-of-view applications has been designed. The optical system at the receiving end utilizes an afocal telecentric structure as the receiving antenna, achieving a reception field-of-view of 36° at a photosensitive area of 1 mm. The relative illuminance exceeds 95%, demonstrating excellent light collection and transmission characteristics. Additionally, the receiver circuit adopts a T-network amplification structure combined with a moment identification circuit, utilizing the TDC7200 to achieve high-precision time measurements. The flight time measurement accuracy is less than 120 ps within a range of 200 ns, and the overall experimental results demonstrate ranging accuracy better than 2 ns within an 8 m distance, meeting the requirements for near-range detection.
-

-
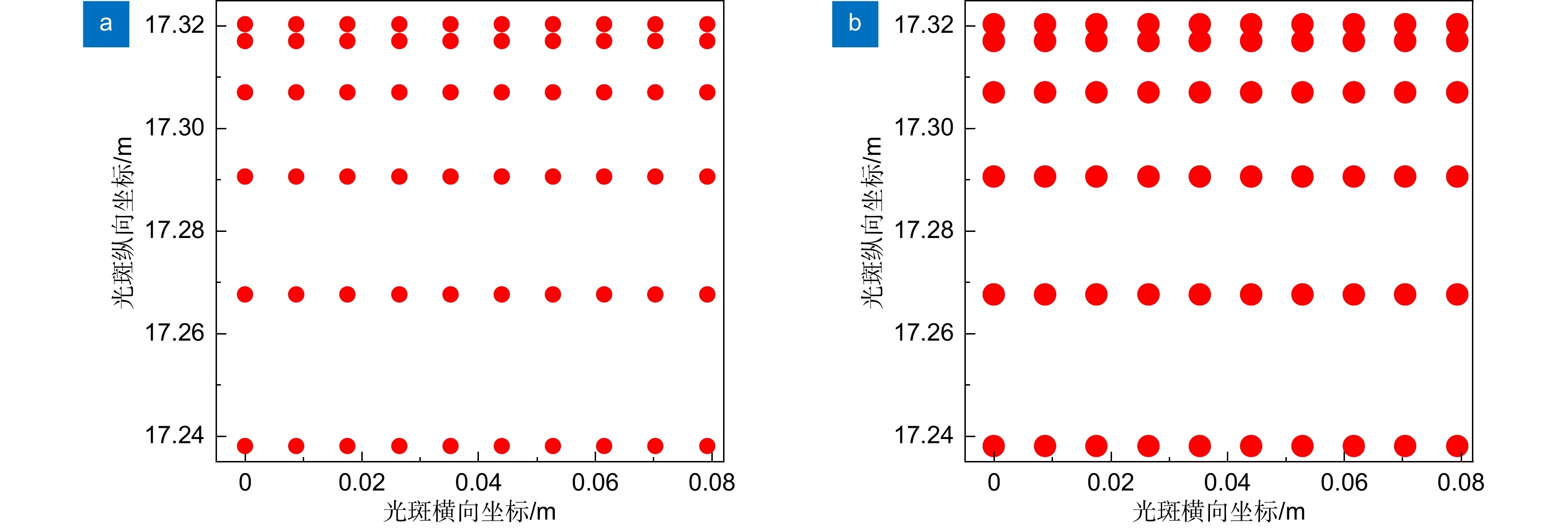
图 2 MEMS扫描光斑阵列。(a)光斑直径等于3 mm; (b)光斑直径等于5 mm
Figure 2. MEMS scanning spot array with varying diameters. (a) Spot diameter of 3 mm; (b) Spot diameter of 5 mm
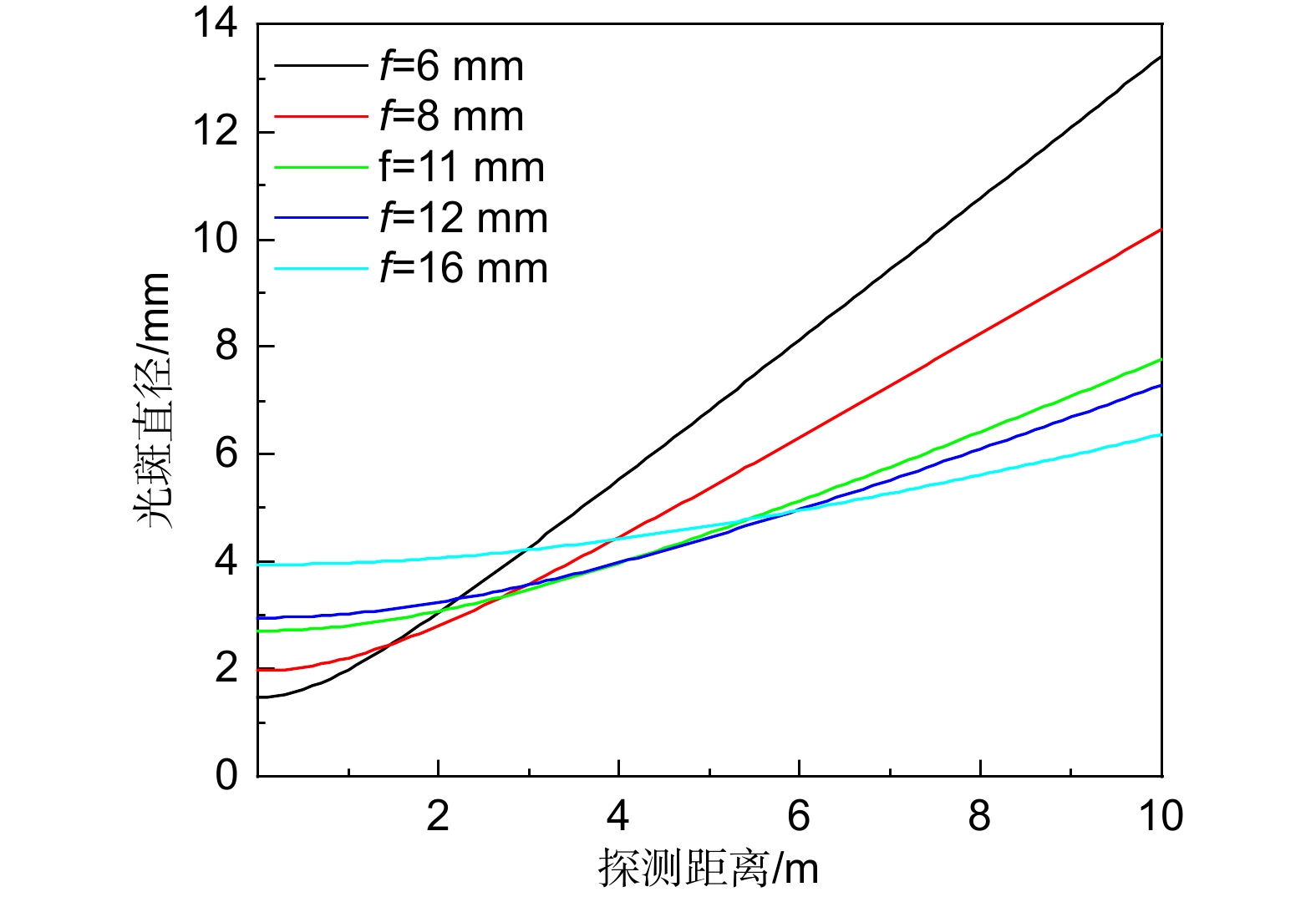
图 3 不同焦距光斑直径变化
Figure 3. Variation of light spot diameter with different focal lengths
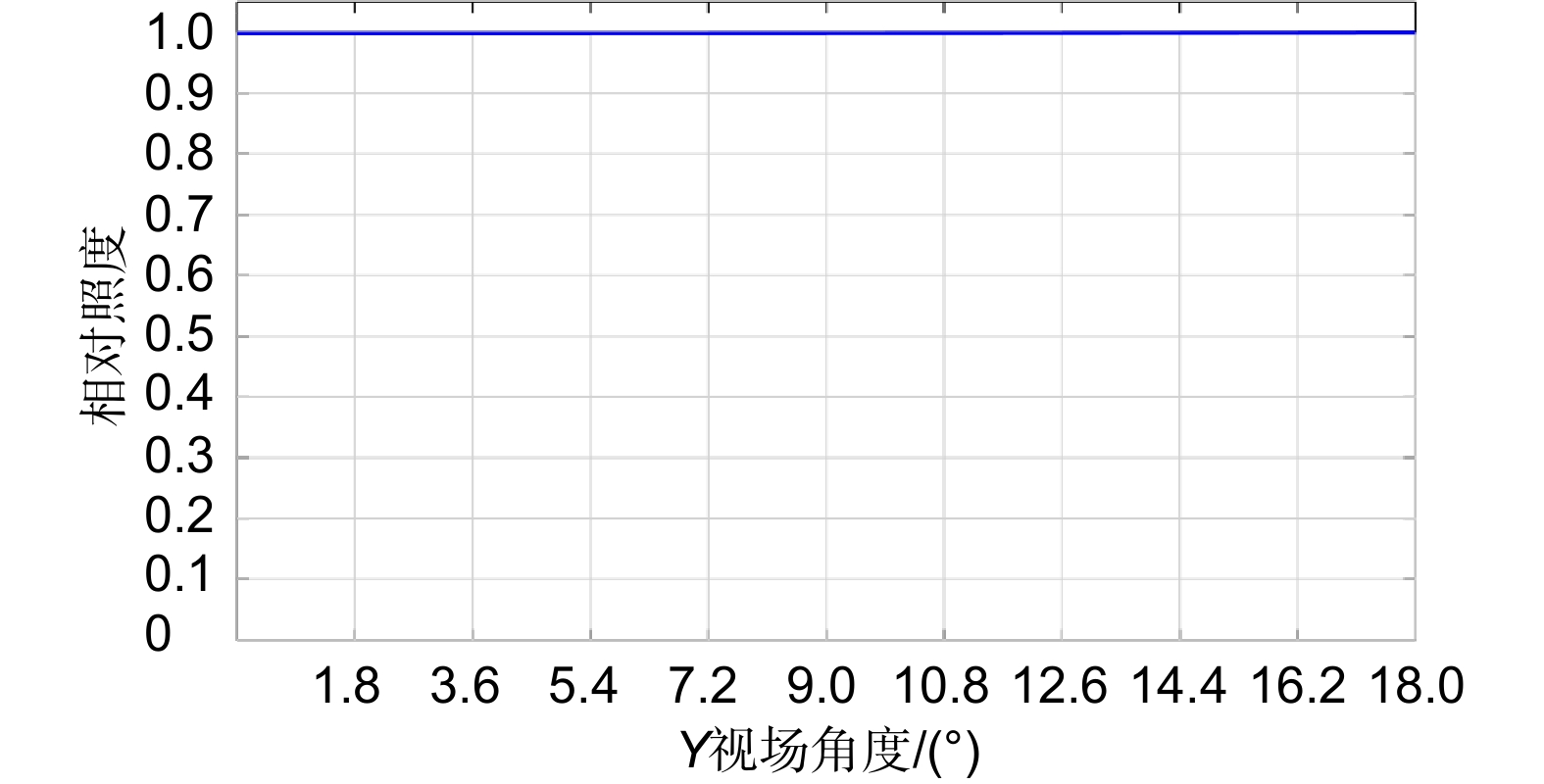
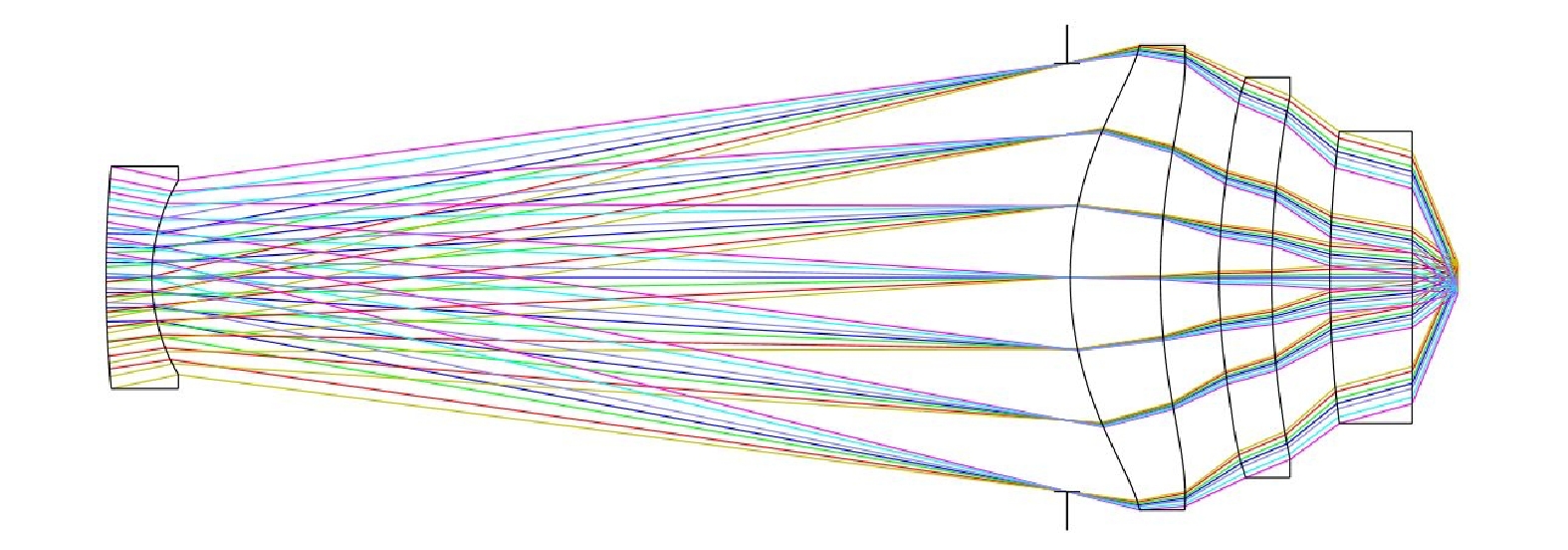
图 9 不同视场相对照度分布
Figure 9. Distribution of relative illuminance in different fields of view
表 1 光学接收系统指标
Table 1. Optical receiver system specifications
参数 指标 工作波段 1550 nm 全视场角 $ \geqslant $30° 全像高 $ \leqslant $1 mm F数 $ \leqslant $1.4 入瞳直径 $ \geqslant $3 mm 全视场相对照度 $ \geqslant $90% 天线接收增益 $ \geqslant $9.4 系统长度 $ \leqslant $50 mm  下载: 导出CSV
下载: 导出CSV
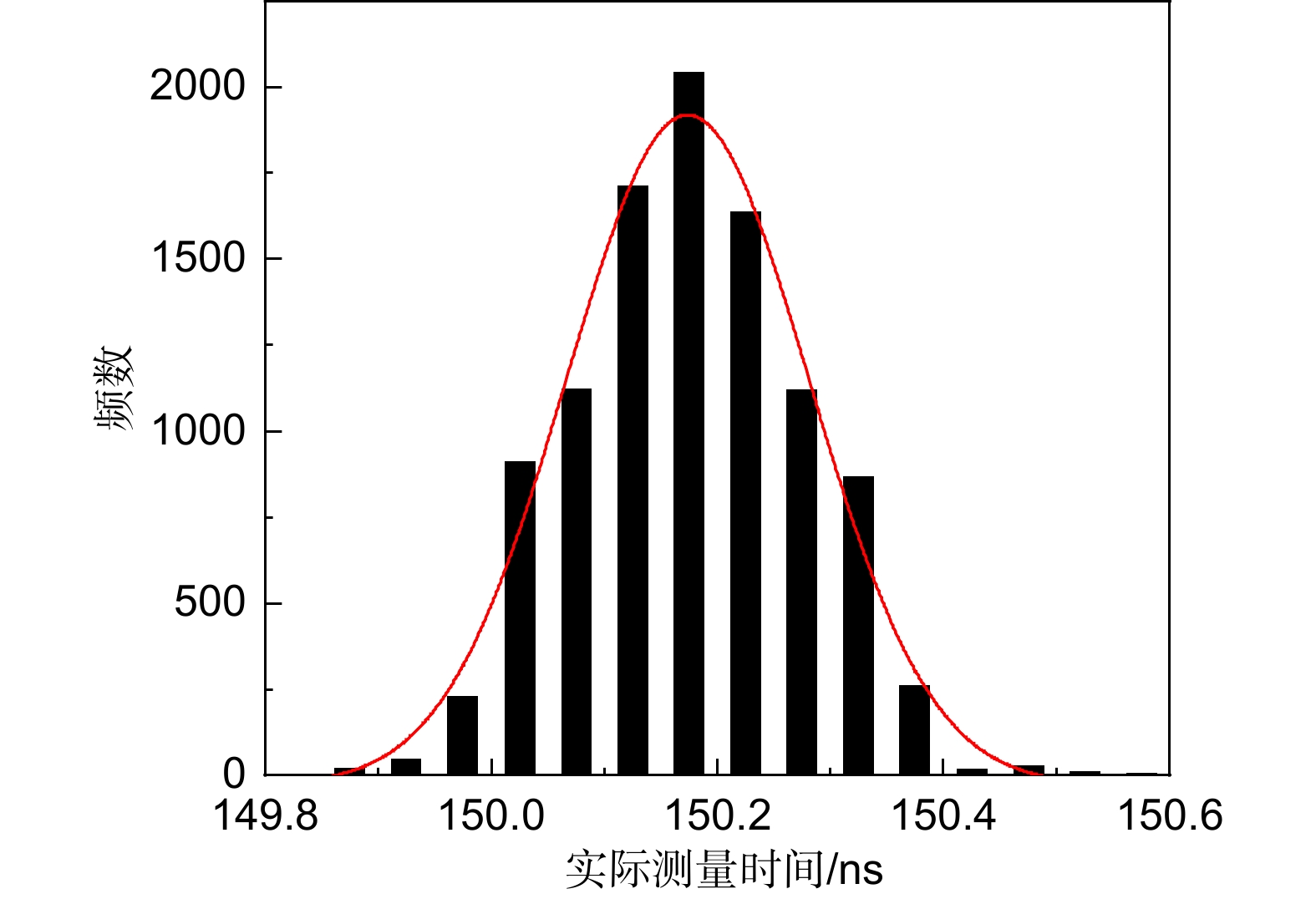
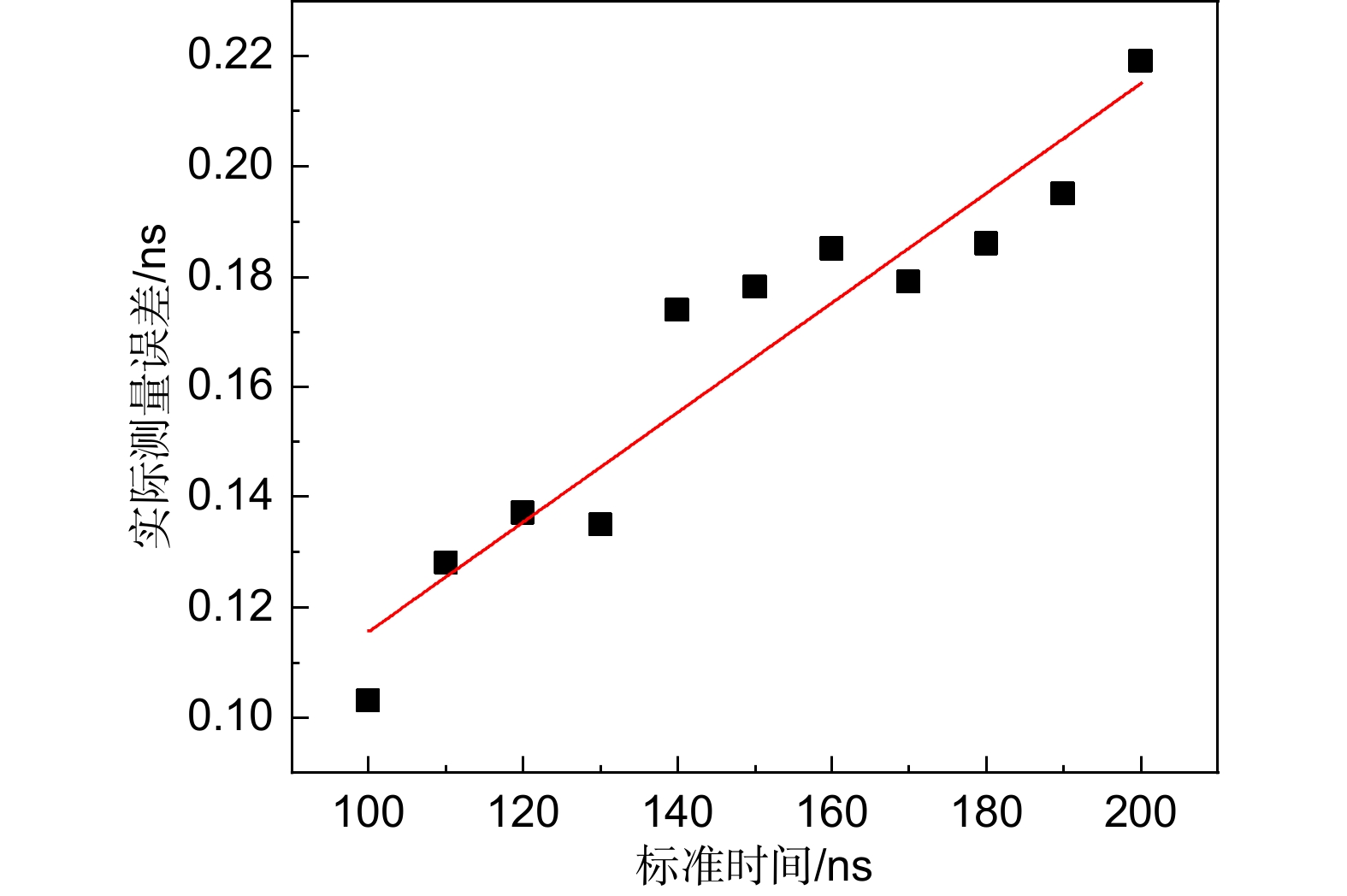
表 2 时间测量数据(时间单位:ns)
Table 2. Time measurement data (time unit: ns)
标准时间间隔 最大测量值 最小测量值 测量平均值 测量误差 标准差 100 100.838 99.292 100.103 0.103 0.092 110 110.603 109.637 110.128 0.128 0.077 120 120.646 119.663 120.137 0.137 0.084 130 130.323 129.969 130.135 0.135 0.107 140 140.388 139.988 140.174 0.174 0.109 150 150.580 149.775 150.178 0.178 0.101 160 160.361 159.979 160.185 0.185 0.107 170 170.469 169.857 170.179 0.179 0.115 180 180.471 179.882 180.186 0.186 0.108 190 190.842 189.607 190.195 0.195 0.117 200 200.853 199.463 200.219 0.219 0.120
下载: 导出CSV
表 3 修正后的实际测距结果
Table 3. Revised actual ranging results
测量距离/m 时间真实值/ns 时间标准差/ns 均值误差/cm 2.5 16.981 0.452 4.71 3 19.811 0.559 2.84 4 26.382 0.649 4.28 5 33.754 0.736 6.31 6 39.354 0.871 9.68 7 47.051 1.236 5.76
下载: 导出CSV
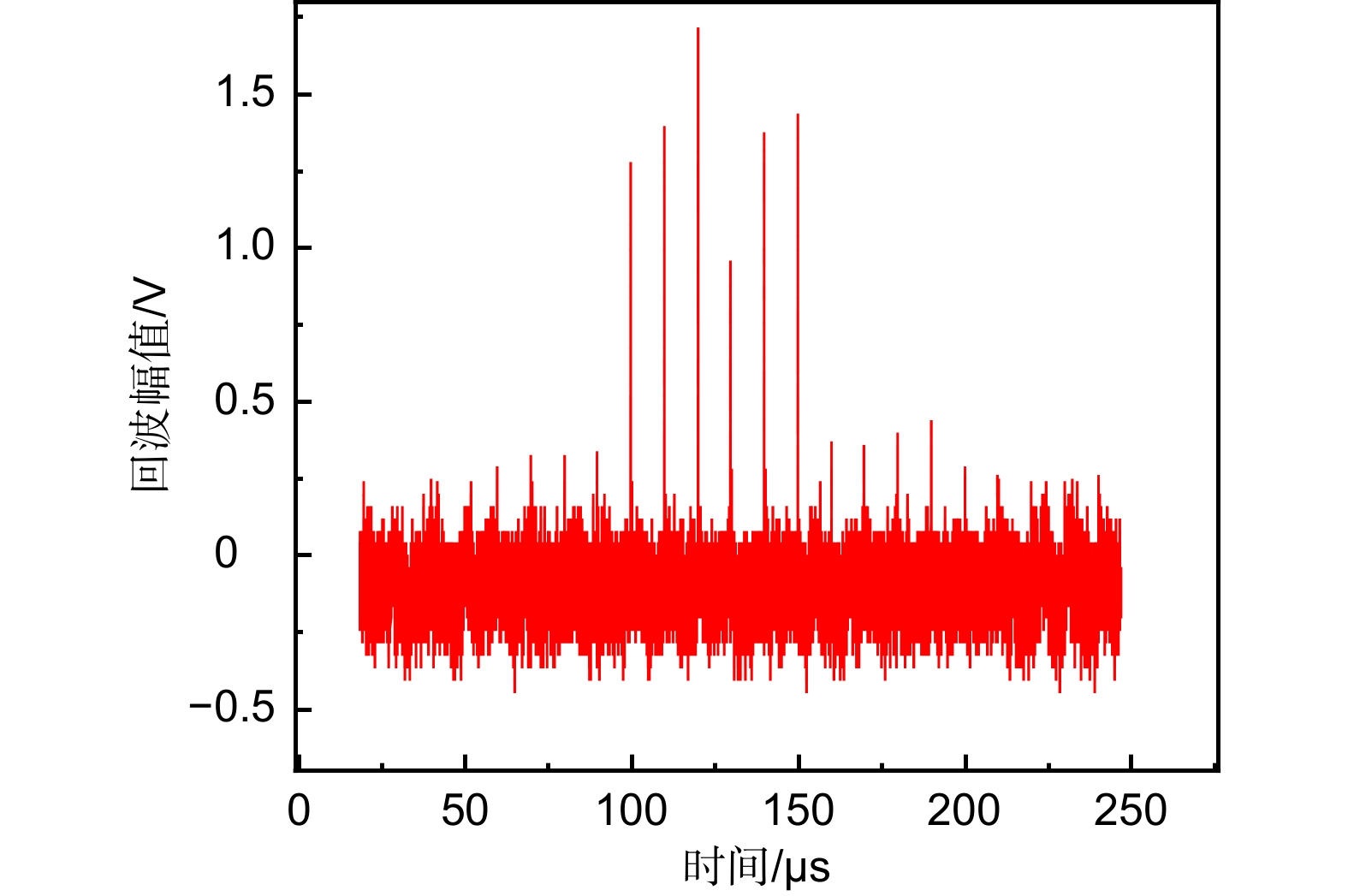
表 4 100 kHz回波测试结果
Table 4. Results of 100 kHz echo test
微镜扫描角度/(°) 回波幅度/mV 测距值/m 实际误差/m +14.5 286 — — +12.6 317 7.82 0.25 +10.6 324 7.75 0.22 +8.5 335 7.68 0.20 +6.4 1277 3.05 0.03 +4.3 1397 3.03 0.02 +2.2 1716 3.02 0.02 0 957 3.03 0.03
下载: 导出CSV
-
[1] Rozsa Z, Sziranyi T. Object detection from a few LIDAR scanning planes[J]. IEEE Trans Intell Veh, 2019, 4(4): 548−560. doi: 10.1109/TIV.2019.2938109
[2] Hanson W S, Jones R E, Jones R H. The Roman military presence at Dalswinton, Dumfriesshire: a reassessment of the evidence from aerial, geophysical and LiDAR survey[J]. Britannia, 2019, 50: 285−320. doi: 10.1017/S0068113X1900031X
[3] Persendt F C, Gomez C. Assessment of drainage network extractions in a low-relief area of the Cuvelai Basin (Namibia) from multiple sources: LiDAR, topographic maps, and digital aerial orthophotographs[J]. Geomorphology, 2016, 260: 32−50. doi: 10.1016/j.geomorph.2015.06.047
[4] Zhao G Y, Lian M, Li Y Y, et al. Mobile lidar system for environmental monitoring[J]. Appl Opt, 2017, 56(5): 1506−1516. doi: 10.1364/AO.56.001506
[5] 陈海平, 李萌阳, 曹庭分, 等. 基于激光雷达数据的火星表面障碍物识别[J]. 光电工程, 2023, 50(2): 220240. doi: 10.12086/oee.2023.220240
Chen H P, Li M Y, Cao T F, et al. Obstacle recognition on Mars surface based on LiDAR data[J]. Opto-Electron Eng, 2023, 50(2): 220240. doi: 10.12086/oee.2023.220240
[6] Raj T, Hanim Hashim F, Baseri Huddin A, et al. A survey on LiDAR scanning mechanisms[J]. Electronics, 2020, 9(5): 741. doi: 10.3390/electronics9050741
[7] Lee X, Wang C H. Optical design for uniform scanning in MEMS-based 3D imaging lidar[J]. Appl Opt, 2015, 54(9): 2219−2223. doi: 10.1364/AO.54.002219
[8] Schwarz F, Senger F, Albers J, et al. Resonant 1D MEMS mirror with a total optical scan angle of 180° for automotive LiDAR[J]. Proc SPIE, 2020, 11293: 1129309. doi: 10.1117/12.2546035
[9] 钟义晖, 龚强, 朱天凤. 基于MEMS高速光学扫描系统[J]. 应用激光, 2021, 41(2): 391−394. doi: 10.14128/j.cnki.al.20214102.391
Zhong Y H, Gong Q, Zhu T F. High speed optical scanning system based on MEMS[J]. Appl Laser, 2021, 41(2): 391−394. doi: 10.14128/j.cnki.al.20214102.391
[10] Siepmann J P, Rybaltowski A. Integrable ultra-compact, high-resolution, real-time MEMS LADAR for the individual soldier[C]//Proceedings of 2005 IEEE Military Communications Conference, Atlantic City, USA, 2005: 3073–3079. https://doi.org/10.1109/MILCOM.2005.1606131.
[11] Tanahashi Y, Koutsuka Y, Tanimoto R, et al. Development of coaxial 3D-LiDAR systems using MEMS scanners for automotive applications[J]. Proc SPIE, 2018, 10757: 107570E. doi: 10.1117/12.2323693
[12] Lee X, Wang X Y, Cui T X, et al. Increasing the effective aperture of a detector and enlarging the receiving field of view in a 3D imaging lidar system through hexagonal prism beam splitting[J]. Opt Express, 2016, 24(14): 15222−15231. doi: 10.1364/OE.24.015222
[13] 李启坤, 邱琪. 基于2D微电子机械系统(MEMS)镜全向激光雷达光学系统设计[J]. 应用光学, 2015, 39(4): 460−465. doi: 10.5768/JAO201839.0401003
Li Q K, Qiu Q. Design on omnidirectional optical system of lidar based on 2D MEMS mirror[J]. J Appl Opt, 2015, 39(4): 460−465. doi: 10.5768/JAO201839.0401003
[14] 范娜娜, 王懋, 温少聪, 等. 基于二维MEMS振镜的激光雷达系统的光学设计[J]. 光学技术, 2020, 46(3): 290−294. doi: 10.13741/j.cnki.11-1879/o4.2020.03.005
Fan N N, Wang M, Wen S C, et al. Optical design for 2D MEMS-based lidar system[J]. Opt Tech, 2020, 46(3): 290−294. doi: 10.13741/j.cnki.11-1879/o4.2020.03.005
[15] Xu F H, Qiao D Y, Xia C F, et al. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution[J]. Sens Actuat A Phys, 2021, 326: 112715. doi: 10.1016/j.sna.2021.112715
[16] Ito K, Niclass C, Aoyagi I, et al. System design and performance characterization of a mems-based laser scanning time-of-flight sensor based on a 256×64-pixel single-photon imager[J]. IEEE Photon J, 2013, 5(2): 6800114. doi: 10.1109/JPHOT.2013.2247586
[17] Stann B L, Dammann J F, Giza M M. Progress on MEMS-scanned ladar[J]. Proc SPIE, 2016, 9832: 98320L. doi: 10.1117/12.2223728
[18] 李小宝. MEMS大视野扫描激光3D图像传感器关键技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2017: 61–64. https://doi.org/10.27061/d.cnki.ghgdu.2017.000001.
Li X B. Research on key technologies of MEMS-based large scanning laser 3D image sensor[D]. Harbin: Harbin Institute of Technology, 2017: 61–64. https://doi.org/10.27061/d.cnki.ghgdu.2017.000001.
[19] 罗栋. 基于MEMS微镜扫描的三维激光雷达样机系统设计[D]. 武汉: 华中科技大学, 2019: 62–78. https://doi.org/10.27157/d.cnki.ghzku.2019.004022.
Luo D. Prototype design of 3D LiDAR system based on MEMS mirror scanning[D]. Wuhan: Huazhong University of Science and Technology, 2019: 62–78. https://doi.org/10.27157/d.cnki.ghzku.2019.004022.
[20] Wang Y Y, Tang P J, Shen L K, et al. LiDAR system using MEMS scanner-based coaxial optical transceiver[C]//Proceedings of the 2020 IEEE 5th Optoelectronics Global Conference, Shenzhen, China, 2020: 166–168. https://doi.org/10.1109/OGC50007.2020.9260456.
[21] 陈建光, 倪旭翔, 袁波, 等. SiPM激光雷达阳光下探测概率性能分析[J]. 光电工程, 2021, 48(10): 210196. doi: 10.12086/oee.2021.210196
Chen J G, Ni X X, Yuan B, et al. Analysis of detection probability performance of SiPM LiDAR under sunlight[J]. Opto-Electron Eng, 2021, 48(10): 210196. doi: 10.12086/oee.2021.210196
[22] 杨宏志, 赵长明, 张海洋, 等. 全光纤激光雷达发射和接收光学系统设计与优化[J]. 光学学报, 2016, 36(11): 1106005. doi: 10.3788/AOS201636.1106005
Yang H Z, Zhao C M, Zhang H Y, et al. Design and optimization of all-fiber lidar transmitting and receiving optical systems[J]. Acta Opt Sin, 2016, 36(11): 1106005. doi: 10.3788/AOS201636.1106005
[23] 陈慧敏, 李铁, 刘锡民, 等. 近程激光探测技术[M]. 北京: 北京理工大学出版社, 2018: 124–127.
Chen H M, Li T, Liu X M, et al. Short-Range Laser Detection Technology[M]. Beijing: Beijing Institute of Technology Press, 2018: 124–127.
[24] 熊蓉玲. 红外系统协同探测性能分析[J]. 激光与红外, 2016, 46(5): 575−577. doi: 10.3969/j.issn.1001-5078.2016.05.012
Xiong R L. Performance analysis on co-detection of infrared systems[J]. Laser Infrared, 2016, 46(5): 575−577. doi: 10.3969/j.issn.1001-5078.2016.05.012
[25] 刘肖民. 超强光探测光学系统设计探讨[J]. 应用光学, 1995, 16(1): 5−8.
Liu X M. Approach to the design of optical system for ultrahigh-light detection[J]. J Appl Opt, 1995, 16(1): 5−8.
[26] 刘肖民. 光电探测光学系统无晕接收特性的研究[J]. 应用光学, 1999, 20(5): 5−7.
Liu X M. The study of non-vignetting receiving features of optical system for electro-optic detecting[J]. J Appl Opt, 1999, 20(5): 5−7.
[27] 何武光, 吴健, 王仕璠. 宽视场有增益光学系统设计[J]. 激光杂志, 2006, 27(1): 27−28. doi: 10.3969/j.issn.0253-2743.2006.01.015
He W G, Wu J, Wang S F. Design of wide-FOV optical system with optical gain[J]. Laser J, 2006, 27(1): 27−28. doi: 10.3969/j.issn.0253-2743.2006.01.015
[28] 白雪菲, 冯迪, 秦川, 等. 高精度脉冲激光测距系统设计与实验研究[J]. 激光杂志, 2019, 40(10): 6−10. doi: 10.14016/j.cnki.jgzz.2019.10.006
Bai X F, Feng D, Qin C, et al. Design and experimental study of high precision pulsed laser ranging system[J]. Laser J, 2019, 40(10): 6−10. doi: 10.14016/j.cnki.jgzz.2019.10.006
-

 点击扫一扫
点击扫一扫
图(20)
表(4)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


