
 E-mail Alert
E-mail Alert RSS
RSS
Identification of salt marsh vegetation "fairy circles" using random forest method and spatial-spectral data of unmanned aerial vehicle LiDAR
-
摘要:
“精灵圈”作为一种典型的空间自组织结构,对盐沼植被生态系统及其功能有重要影响。获取“精灵圈”的空间格局及时空变化,可为厘清其生态演化机理提供重要科学支撑。本文基于随机森林机器学习方法,结合无人机激光雷达(LiDAR)点云的空间信息与光谱信息,对盐沼植被“精灵圈”进行智能识别与提取。首先,利用激光雷达方程和Phong模型,消除距离、入射角以及镜面反射效应对强度数据的影响,并且通过校正后强度数据滤波分离植被点云与地面点云。然后,构造系列空间特征及几何变量,利用随机森林算法,对植被点云中的正常植被和“精灵圈”进行分类。结果表明:该方法无需人工经验设置参数,能够精确地从无人机LiDAR三维点云数据中快速自动识别“精灵圈”,总体精度为83.9%。本文为“精灵圈”时空分布反演提供了一种高精度的方法,也为基于机器学习的三维点云数据处理提供了技术借鉴。
Abstract:Spatial self-organization is a common phenomenon in many natural ecosystems. The "fairy circle" is a typical spatial self-organization structure that has significant impacts on the ecological functions of the salt marsh vegetation ecosystems. Obtaining the spatial pattern and spatiotemporal changes of the "fairy circle" can provide important scientific support for clarifying its ecological evolution mechanism. In this study, a machine learning method based on random forest is used to intelligently identify and extract the "fairy circle" in salt marsh vegetation using the spatial-spectral information from unmanned aerial vehicle (UAV) LiDAR. First, the effects of the distance, incident angle, and specular reflection on intensity data are eliminated using the laser radar equation and the Phong model. Second, the corrected intensity data are filtered to separate the vegetation from the ground. Third, a series of spatial features and geometric variables are used to classify the normal vegetation and "fairy circles" using the random forest algorithm. The results demonstrate that the proposed method can accurately extract "fairy circles" from UAV LiDAR 3D point cloud data without requiring manual experience-based parameter settings. The overall accuracy of the proposed method is 83.9%, providing a high-precision method for the spatiotemporal distribution inversion of "fairy circles" and technical references for 3D point cloud data processing based on machine learning.
-
Key words:
- random forest /
- unmanned aerial vehicle /
- LiDAR /
- spatial self-organization /
- point cloud classification
-
Overview: Spatial self-organization is a fascinating and widespread phenomenon observed in various natural ecosystems. One such intriguing structure is the "fairy circle", known for its significant influence on the functioning of salt marsh vegetation ecosystems. "Fairy circles" are known to play a crucial role in shaping salt marsh vegetation ecosystems, and their identification and understanding can offer valuable insights into ecological processes and dynamics. Understanding and identifying these "fairy circles" is of utmost importance for ecological research and conservation efforts. To address this, the present study employs a sophisticated machine learning technique called random forest to intelligently identify and extract "fairy circles" within salt marsh vegetation using data from unmanned aerial vehicle (UAV) LiDAR point clouds. The initial step in this research involves addressing potential complications arising from distance, incident angle, and specular reflection effects on the intensity data obtained from the UAV LiDAR. By applying the laser radar equation and the Phong model, these confounding factors are successfully eliminated to obtain the corrected intensity data. A filtering process is employed on the corrected intensity data to separate the vegetation from the ground points. To effectively distinguish between the normal vegetation and the "fairy circles," a set of spatial features and geometric variables are employed, and a random forest model is constructed using these features and variables. The results demonstrate the extraordinary capability of the proposed method to accurately identify and extract "fairy circles" from UAV 3D point cloud data, achieving an overall accuracy rate of 83.9%. The study represents a groundbreaking advancement in the study of "fairy circles" and paves the way for spatiotemporal distribution inversion of these intriguing structures. Additionally, the application of machine learning, particularly the random forest algorithm, in combination with UAV LiDAR technology, demonstrates the potential of artificial intelligence and remote sensing in ecological research. The implications of this research extend beyond salt marsh ecosystems. The methodological approach presented here can be adapted and applied to other natural ecosystems with spatial self-organization phenomena. By integrating machine learning and advanced remote sensing techniques, researchers can explore and comprehend various spatial structures, contributing to a deeper understanding of ecological patterns and processes on a broader scale.
-

-
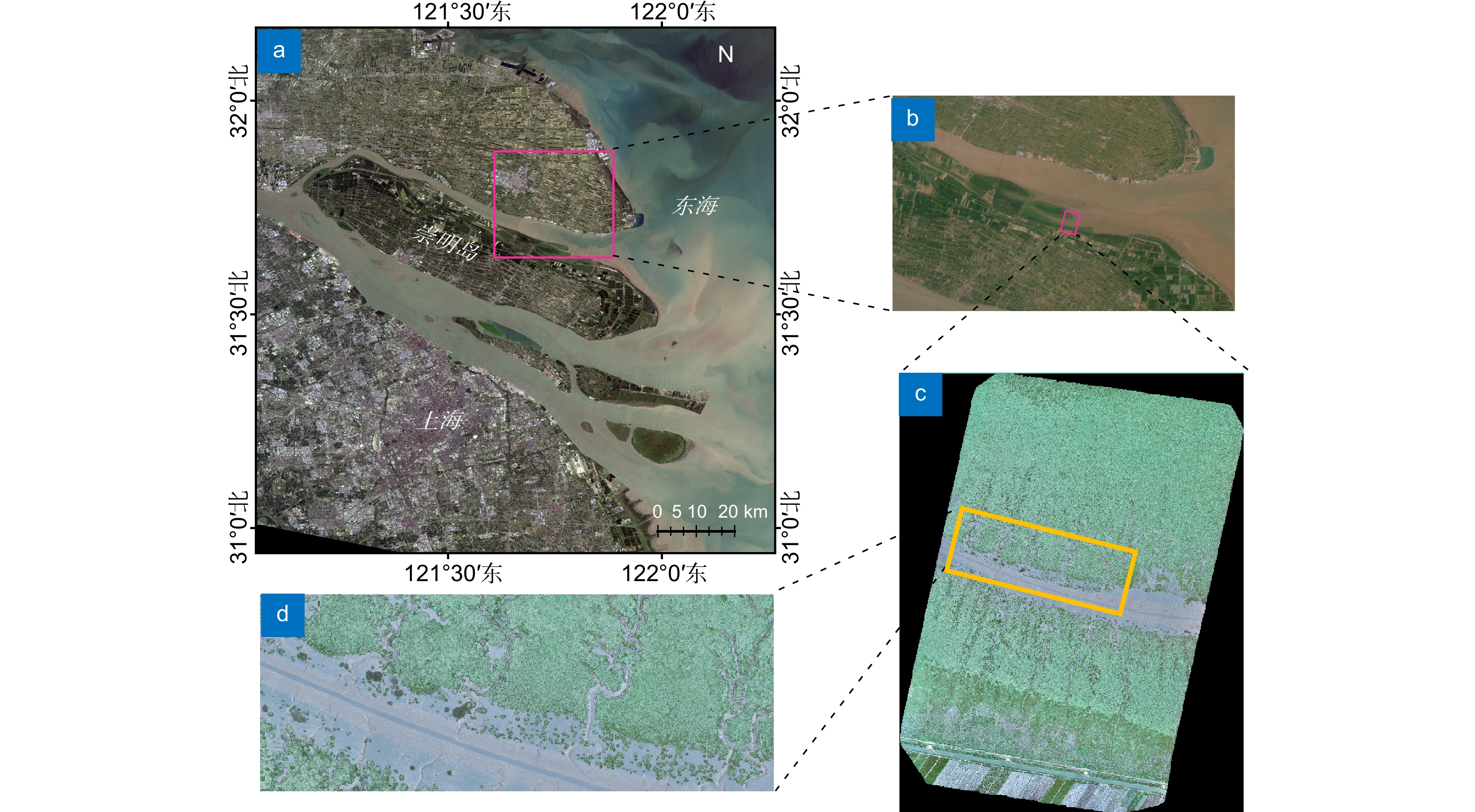
图 1 (a, b)研究区域概况;(c, d)研究区域正射影像
Figure 1. (a, b) Overview of the study area; (c, d) Orthophoto of the study area
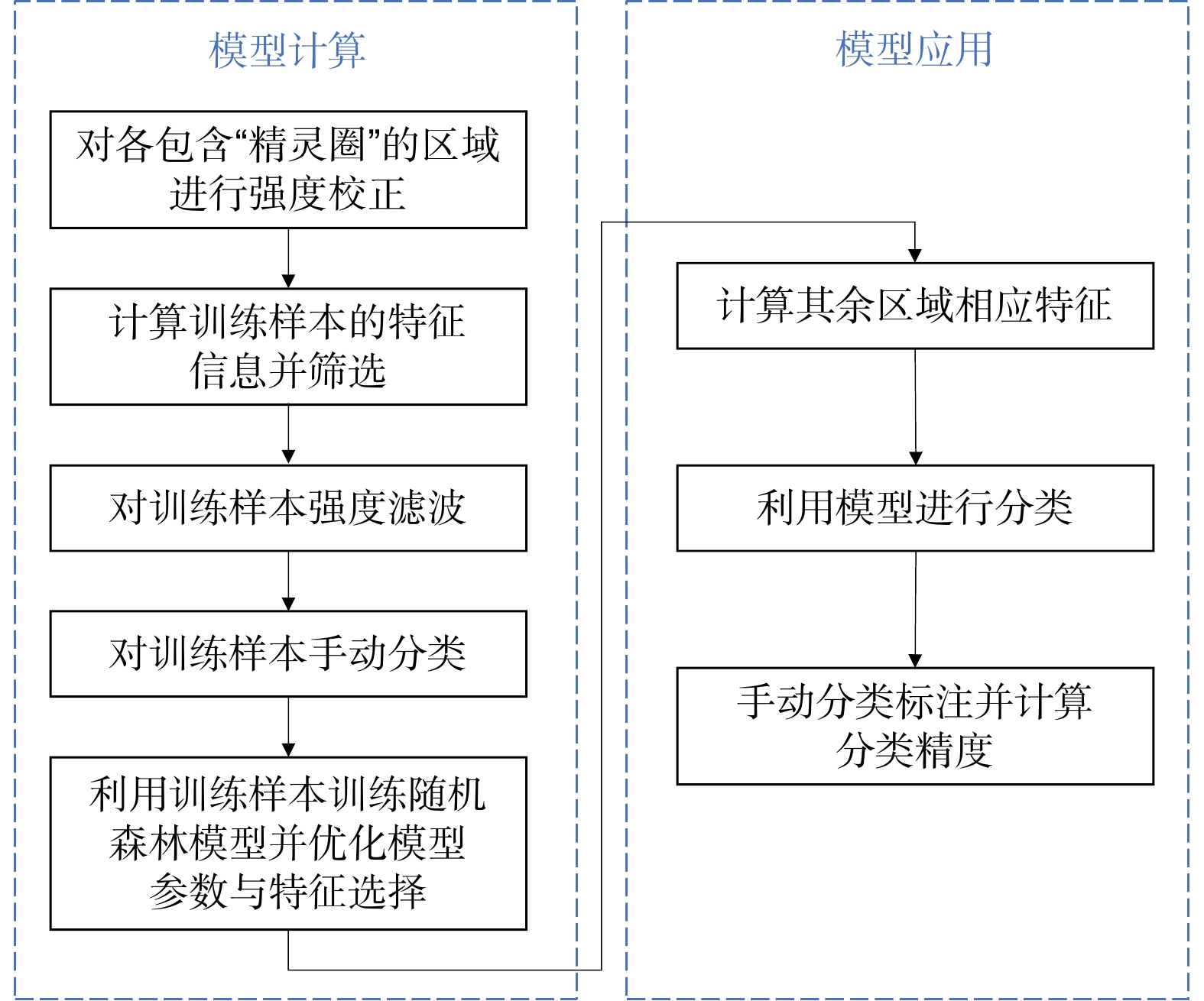
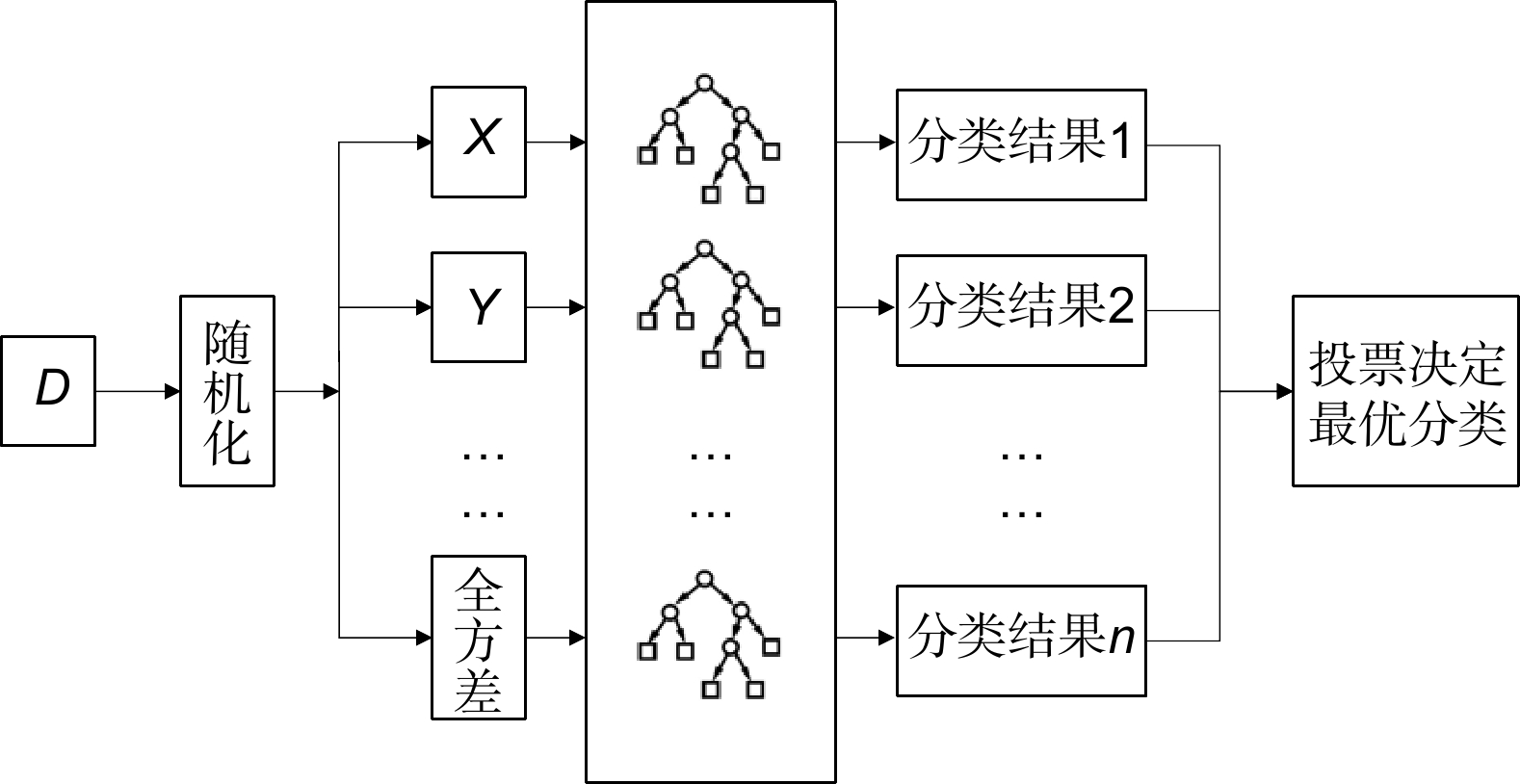
图 2 基于随机森林的“精灵圈”和正常植被识别技术路线
Figure 2. "Fairy circle" and normal vegetation identification technology route based on random forest algorithm
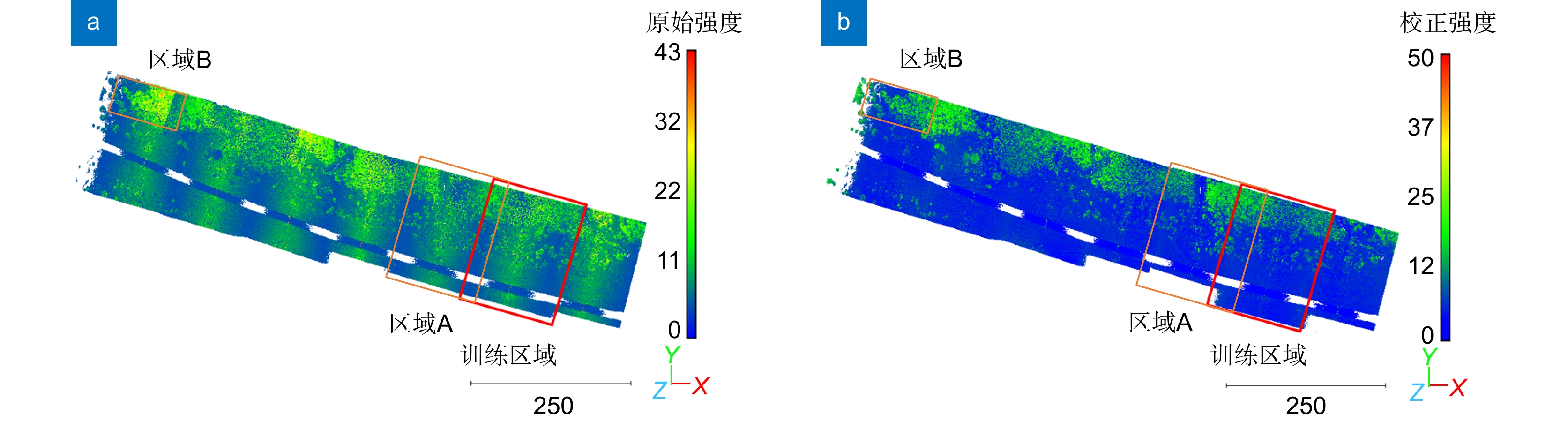
图 4 (a)原始强度;(b)校正强度。其中:红色矩形框代表本文模型训练区域,橙色矩形框代表替换的其他训练区域
Figure 4. (a) Original intensity, and (b) corrected intensity, where the red box represents the training set and the orange box represents the replacement training set
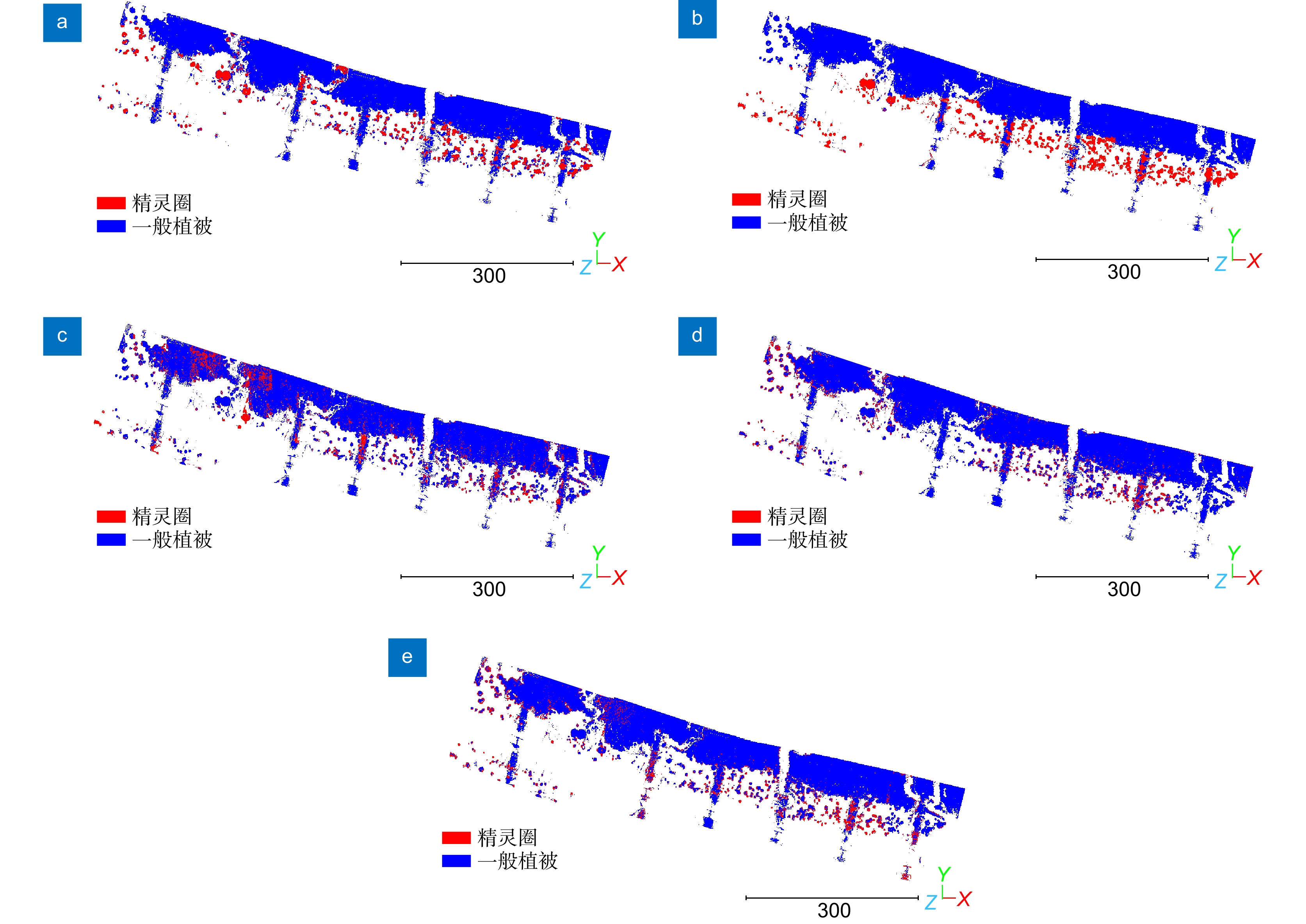
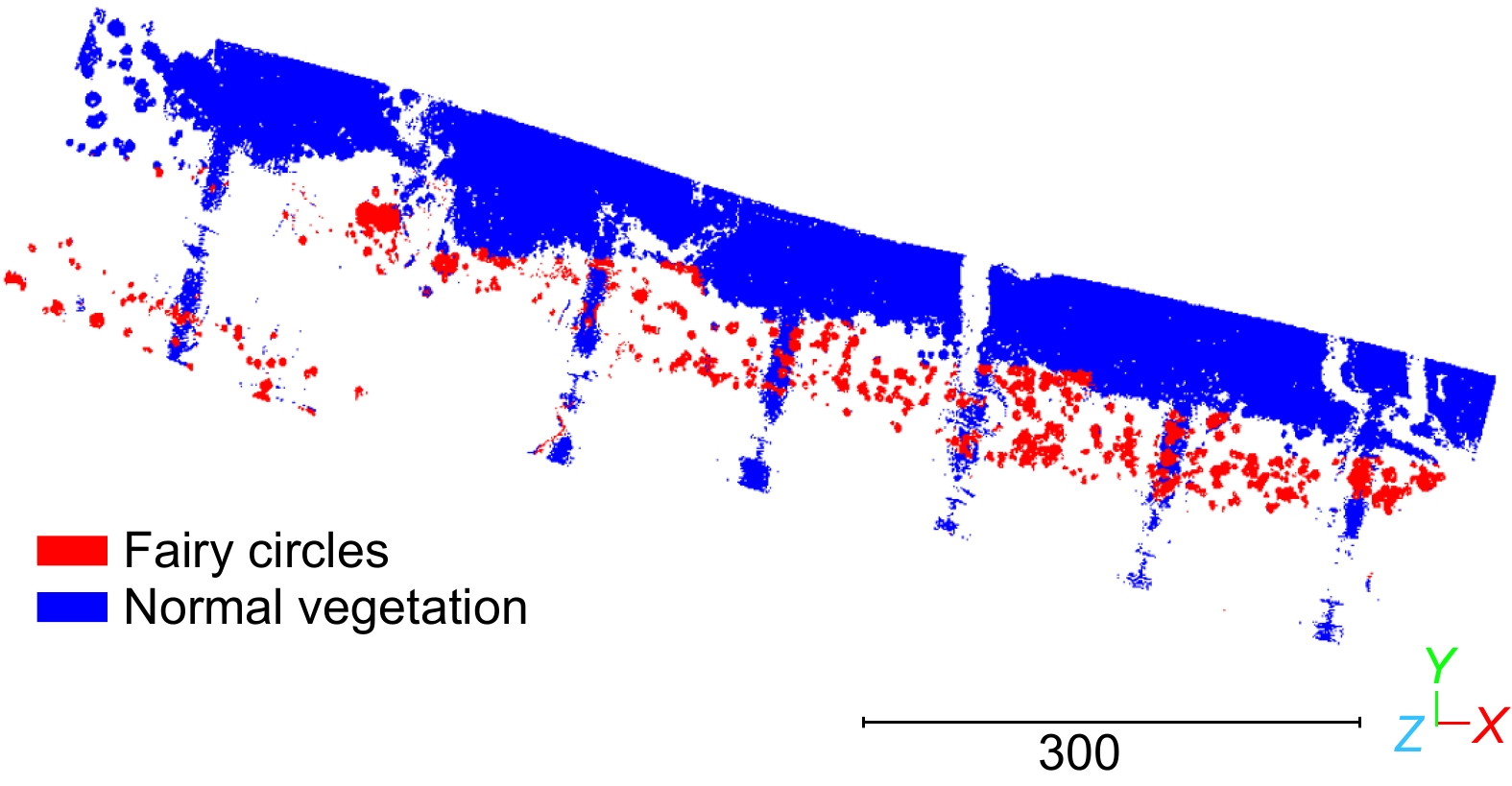
图 5 (a)文献[13]方法提取结果;(b)本文方法提取结果;(c)去除几何参量提取结果;(d)去除空间坐标提取结果;(e)去除校正强度提取结果
Figure 5. (a) Extracted result obtained by reference [13]; (b) Extracted result obtained by the proposed method; (c) Extracted result obtained by the proposed method without geometric features; (d) Extracted result obtained by the proposed method without spatial coordinates; (e) Extracted result obtained by the proposed method without corrected intensity
表 1 随机森林点云特征
Table 1. Point cloud features in random forests
特征 含义 X 点云数据x坐标 Y 点云数据y坐标 Z 点云数据z坐标 校正强度 式(1)校正后的强度值 粗糙度 该点与最近邻最佳拟合平面之间的距离 密度 指定半径内包含的邻域点数量 全方差 $ \sqrt[3]{{{L_1} \cdot {L_2} \cdot {L_3}}} $ 特征熵 $ -({L}_{1}\cdot\mathrm{ln}\left({L}_{1}\right)+{L}_{2}\cdot\mathrm{ln}\left({L}_{2}\right)+{L}_{3}\cdot \mathrm{ln}\left({L}_{3}\right)) $ 各向异性 $ {L}_{1}-{L}_{3}/{L}_{1} $ 垂直度 $ 1-\left|\left\langle{Z,{e}_{3}}\right\rangle\right| $ 第三特征值 $ {L}_{3} $  下载: 导出CSV
下载: 导出CSV
表 2 本文方法与文献[13]方法对比
Table 2. Results comparison between the proposed method and that in reference [13]
方法 总体精度/% 漏分率/% 误分率/% 随机森林方法 83.90 14.29 1.81 文献[13]方法 77.55 18.82 3.63
下载: 导出CSV
表 3 消融实验结果
Table 3. Results of the ablation study
消融实验 训练集精度/% 测试集精度/% 去除几何参量 93.57 90.65 去除空间坐标 96.71 93.67 去除校正强度 98.64 96.51
下载: 导出CSV
-
[1] Tarnita C E, Bonachela J A, Sheffer E, et al. A theoretical foundation for multi-scale regular vegetation patterns[J]. Nature, 2017, 541(7637): 398−401. doi: 10.1038/nature20801
[2] Zhao L X, Zhang K, Siteur K, et al. Fairy circles reveal the resilience of self-organized salt marshes[J]. Sci Adv, 2021, 7(6): eabe1100. doi: 10.1126/sciadv.abe1100
[3] Rietkerk M, Bastiaansen R, Banerjee S, et al. Evasion of tipping in complex systems through spatial pattern formation[J]. Science, 2021, 374(6564): eabj0359. doi: 10.1126/science.abj0359
[4] Ruiz-Reynés D, Gomila D, Sintes T, et al. Fairy circle landscapes under the sea[J]. Sci Adv, 2017, 3(8): e1603262. doi: 10.1126/sciadv.1603262
[5] Shi L, Liu Q S, Huang C, et al. Mapping quasi-circular vegetation patch dynamics in the Yellow River Delta, China, between 1994 and 2016[J]. Ecol Indic, 2021, 126: 107656. doi: 10.1016/j.ecolind.2021.107656
[6] Liu Q S, Huang C, Liu G H, et al. Comparison of CBERS-04, GF-1, and GF-2 satellite panchromatic images for mapping quasi-circular vegetation patches in the Yellow River Delta, China[J]. Sensors, 2018, 18(8): 2733. doi: 10.3390/s18082733
[7] 杨必胜, 梁福逊, 黄荣刚. 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46(10): 1509−1516. doi: 10.11947/j.AGCS.2017.20170351
Yang B S, Liang F X, Huang R G. Progress, challenges and perspectives of 3D LiDAR point cloud processing[J]. Acta Geod Cartogr Sin, 2017, 46(10): 1509−1516. doi: 10.11947/j.AGCS.2017.20170351
[8] 李玉美, 郭庆华, 万波, 等. 基于激光雷达的自然资源三维动态监测现状与展望[J]. 遥感学报, 2021, 25(1): 381−402. doi: 10.11834/jrs.20210351
Li Y M, Guo Q H, Wan B, et al. Current status and prospect of three-dimensional dynamic monitoring of natural resources based on LiDAR[J]. Natl Remote Sens Bull, 2021, 25(1): 381−402. doi: 10.11834/jrs.20210351
[9] Liang X L, Kankare V, Hyyppä J, et al. Terrestrial laser scanning in forest inventories[J]. ISPRS J Photogramm Remote Sens, 2016, 115: 63−77. doi: 10.1016/j.isprsjprs.2016.01.006
[10] Xie W M, Guo L C, Wang X Y, et al. Detection of seasonal changes in vegetation and morphology on coastal salt marshes using terrestrial laser scanning[J]. Geomorphology, 2021, 380: 107621. doi: 10.1016/j.geomorph.2021.107621
[11] 杨必胜, 董震. 点云智能研究进展与趋势[J]. 测绘学报, 2019, 48(12): 1575−1585. doi: 10.11947/j.AGCS.2019.20190465
Yang B S, Dong Z. Progress and perspective of point cloud intelligence[J]. Acta Geod Cartogr Sin, 2019, 48(12): 1575−1585. doi: 10.11947/j.AGCS.2019.20190465
[12] Jin J L, Verbeurgt J, De Sloover L, et al. Support vector regression for high-resolution beach surface moisture estimation from terrestrial LiDAR intensity data[J]. Int J Appl Earth Obs Geoinf, 2021, 102: 102458. doi: 10.1016/j.jag.2021.102458
[13] Tao P J, Tan K, Ke T, et al. Recognition of ecological vegetation fairy circles in intertidal salt marshes from UAV LiDAR point clouds[J]. Int J Appl Earth Obs Geoinf, 2022, 114: 103029. doi: 10.1016/j.jag.2022.103029
[14] Yan W Y, Shaker A. Radiometric correction and normalization of airborne LiDAR intensity data for improving land-cover classification[J]. IEEE Trans Geosci Remote Sens, 2014, 52(12): 7658−7673. doi: 10.1109/TGRS.2014.2316195
[15] Breiman L. Random forests[J]. Mach Learn, 2001, 45(1): 5−32. doi: 10.1023/A:1010933404324
[16] Freund Y, Schapire R E. A decision-theoretic generalization of on-line learning and an application to boosting[J]. J Comput Syst Sci, 1997, 55(1): 119−139. doi: 10.1006/jcss.1997.1504
[17] Breiman L. Bagging predictors[J]. Mach Learn, 1996, 24(2): 123−140. doi: 10.1023/A:1018054314350
[18] 方匡南, 吴见彬, 朱建平, 等. 随机森林方法研究综述[J]. 统计与信息论坛, 2011, 26(3): 32−38. doi: 10.3969/j.issn.1007-3116.2011.03.006
Fang K N, Wu J B, Zhu J P, et al. A review of technologies on random forests[J]. Stat Inf Forum, 2011, 26(3): 32−38. doi: 10.3969/j.issn.1007-3116.2011.03.006
[19] Sheykhmousa M, Mahdianpari M, Ghanbari H, et al. Support vector machine versus random forest for remote sensing image classification: a meta-analysis and systematic review[J]. IEEE J Sel Top Appl Earth Obs Remote Sens, 2020, 13: 6308−6325. doi: 10.1109/JSTARS.2020.3026724
[20] Hackel T, Wegner J D, Schindler K. Contour detection in unstructured 3D point clouds[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, 2016: 1610–1618. https://doi.org/10.1109/CVPR.2016.178.
[21] 刘国栋, 刘佳, 刘浪. 一种基于机载LiDAR数据的山区道路提取方法[J]. 激光技术, 2022, 46(4): 466−473. doi: 10.7510/jgjs.issn.1001-3806.2022.04.005
Liu G D, Liu J, Liu L. A mountain road extraction method based on airborne LiDAR data[J]. Laser Technol, 2022, 46(4): 466−473. doi: 10.7510/jgjs.issn.1001-3806.2022.04.005
-
 点击扫一扫
点击扫一扫
图(6)
表(3)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


