
 E-mail Alert
E-mail Alert RSS
RSS
A review on precision control methodologies for optical-electric tracking control system
-
摘要:
精密控制技术离不开光机电结构配置、电机驱动、传感器、控制算法以及载荷平台的发展,它是实现高精度光电跟踪的必要手段。无论固定地基平台还是运动平台,扰动抑制、目标跟踪以及分布式智能协同的三大关键技术始终是光电跟踪控制系统面临的技术难点。本文综述了针对上述几大关键问题的精密控制技术,展示了一些先进和前沿控制技术的研究成果,同时指出未来重点研究方向的主要思路。根据扰动影响的不同机理,从精密驱动、惯性稳定、振动控制三个方面介绍了相应扰动抑制技术的研究进展以及热点,并强调基于Stewart平台的振动与指向一体化技术是空间光电跟踪系统的重要技术方向。复合轴控制系统仍然是提高目标跟踪最有效的根本方式,最基本的技术问题是提高精跟踪倾斜镜跟踪系统的性能。观测器控制尤其是仅有误差测量的观测器技术特别适用于复合轴光电跟踪系统,发展三级或者更高级的复合轴系统应该特别注意高性能电机的应用。最后,提出多智能协同光电系统是光电跟踪领域未来重点的发展方向,需要研究多智能体的协同定位、编队控制以及载荷平台一体化等精密控制技术。
Abstract:Precision control methodologies are necessary to implement high-precision optical-electric tracking performance, and depend on structural configuration, actuator drive, sensors, control algorithm and load platform. However, the optical-electric tracking system is facing with the three key technologies, disturbance rejection, target tracking and distributed intelligent coordination, both foundation platform and moving platform. In this paper, precision control methodologies aiming at the above several key technical problems are summarized, and the research results of some advanced and frontier control technologies are presented, and the main ideas of the future key research directions are pointed out. In addition, the research progress and hotspot of disturbance rejection technology from three aspects of precision drive, inertial stability as well as vibration control according to the different mechanism of disturbance influence are introduced, and the integrated technology of vibration and direction based on Stewart platform is an important technical direction of space optical-electric tracking system are emphasized. The composite axis control system is still the most effective fundamental way to improve the target tracking, and the most essential technical problem is to improve the closed-loop performance of the tip-tilt mirror system in precision tracking. It has to be mentioned that observer control is especially suitable for composite axis optical-electric tracking system, especially the observer technology based solely on error, and the development of three or more advanced composite shaft systems has to pay special attention to the application of high performance motors. Eventually, it is proposed that multi-intelligence cooperative optoelectronic system is the key development direction in the field of optical-electric tracking in the future, and it is necessary for the system to develop multi-agent cooperative positioning, formation control and load platform integration and other precise control technologies.
-

Overview: The optical-electric tracking system characterizes a high-dynamic tracking system with the only line of sight error available, and its tracking accuracy is one of the key indexes for the optical–electric tracking control system. Precision control methodologies are necessary tools to implement high-precision tracking performance. Facing different applying areas, the tracking control system has to have a different performance to satisfy with conditions, and need to require high-performance control techniques. In another way, control techniques promote the development of the tracking control system. In essence, control methodologies only push the closed-loop performance to close to sensor resolution. Obviously, there is no method to reach this point. So, it is necessary to investigate suitable control methodologies to improve performance of the tracking control system. The optical-electric tracking system from single stage type to the dual-stage type is inseparable from the progress of actuator, sensor, materials, and mechanical structures. But, due to complex disturbances and maneuver target inducing dynamic lag errors in the hash working condition, the tracking performance could not meet the mission. High control bandwidth is usually restricted in a finite sampling rate of a charge-coupled device (CCD) based tracking loop, which hinders a good closed-loop performance. As far as tracking control is concerned, a rate feedforward controller is usually used to improve the control performance; however, it is restricted by the line-of-sight (LOS) rate, which is required to be estimated due to only the LOS error available in the CCD-based tracking control system. Besides that, it is also affected by the inverse of the control model. Vibration rejection is a key technology of practical engineering, especially in optical telescopes with a stable accuracy of μrad level. The closed-loop performance of optical telescopes is largely determined by the control bandwidth, while it is severely limited by the low sampling rate and large time delay of the image sensor, so it is difficult to mitigate structural vibrations in optical telescopes, especially wideband vibrations because they exist universally and greatly affect the stability of the system. Different from general motion control and visual servoing system, the tracking system has to accommodate for being applied in different platforms, which requires solving the three problems of disturbance rejection, target tracking and cooperative position. This paper reviews and investigates state of art control techniques and methodologies in the tracking control system, and also looks into the future research.
-

-
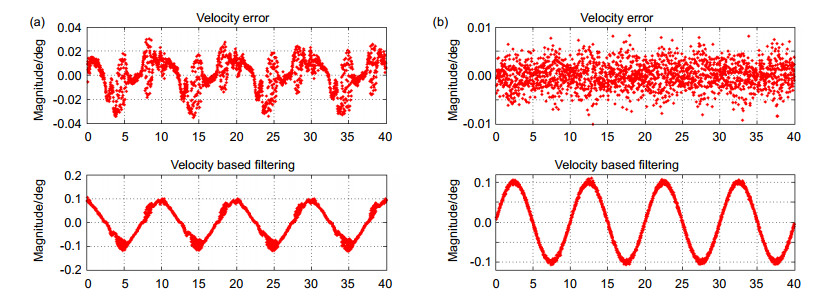
图 4 速度跟踪误差曲线$\dot \theta $=0.1°sin(0.5t)。(a)无加速度反馈;(b)有加速度反馈
Figure 4. Velocity tracking error $\dot \theta $=0.1°sin(0.5t). (a) Without acceleration feedback; (b) Acceleration feedback
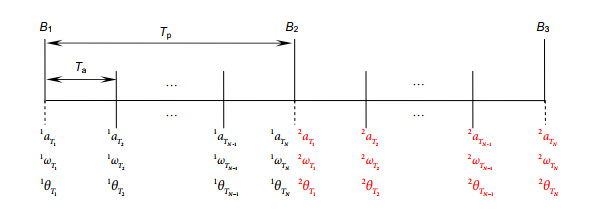
图 6 初始速度和初始位置估计原理
Figure 6. Schematic diagram of estimation of initial velocity and position
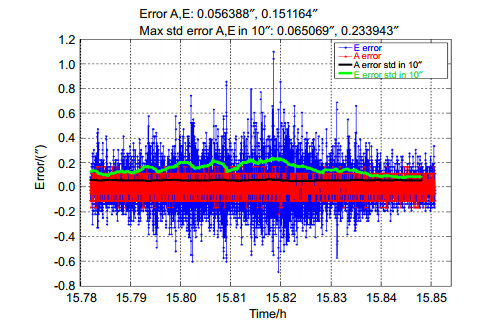
图 10 1.2 m望远镜风扰下的定位精度
Figure 10. The tracking accuracy of 1.2 m telescope in the condition of wind disturbance
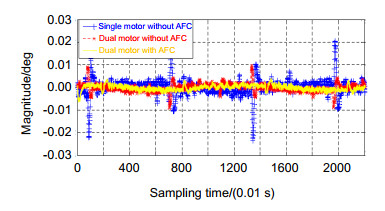
图 13 单、双电机正弦轨迹跟踪误差
Figure 13. Tracking error of single and dual motor sinusoidal trajectory
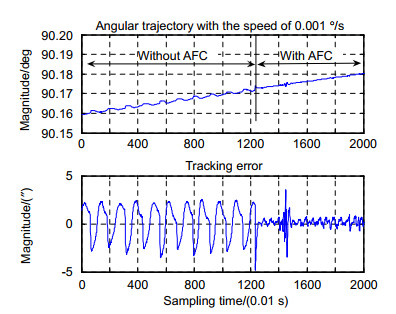
图 14 基于加速度反馈的直线轨迹跟踪
Figure 14. Linear trajectory tracking based on acceleration feedback

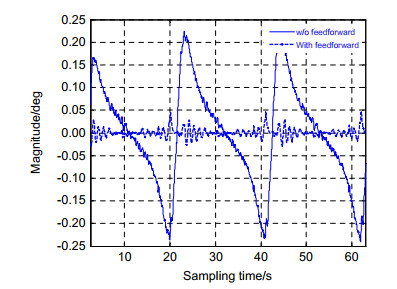
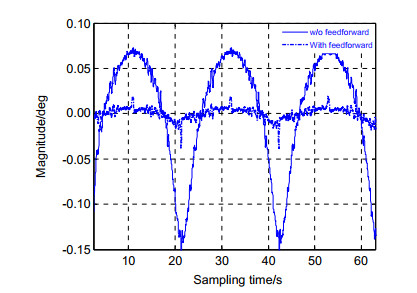
图 31 基于编码器测量合成目标的前馈控制方法
Figure 31. Feedforward control method based oncomposite of position encoder
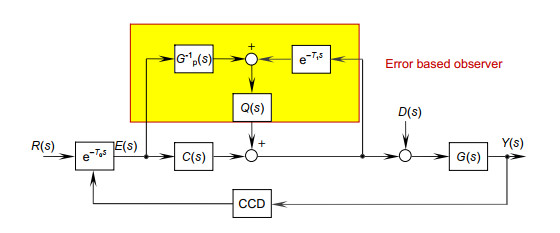
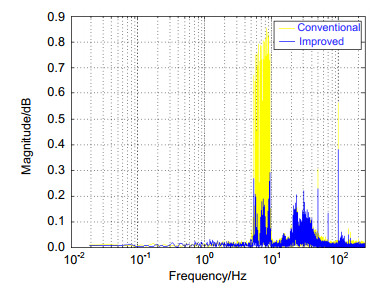
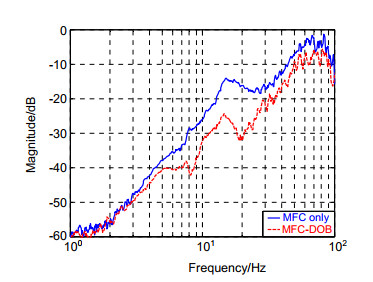
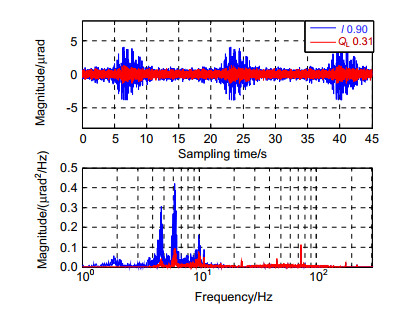
图 39 不同控制器作用下的闭环误差对比图
Figure 39. Spectra of closed-loop errors with different controllers
-
[1] Ulich B L. Overview of acquisition, tracking, and pointing system technologies[J]. Proceedings of SPIE, 1988, 887: 40–63. doi: 10.1117/12.944208
[2] Bigley W J. Supervisory control of electro-optic tracking and pointing[J]. Proceedings of SPIE, 1990, 1304: 207–218. doi: 10.1117/12.21566
[3] Boroson D M, Robinson B S, Burianek D A, et al. Overview and status of the lunar laser communications demonstration[J]. Proceedings of SPIE, 2012, 8264: 82460C. http://www.spie.org/x648.xml?product_id=2045508
[4] 李生良, 王毅.用于精密跟踪的复合轴伺服系统[J].光学 精密工程, 1980(2): 50–56. http://www.cnki.com.cn/Article/CJFDTotal-GXJM198002008.htm
[5] 马佳光, 尹义林. 778光电经纬仪跟踪控制系统[J].光学工程, 1986(1): 54–64. http://www.cnki.com.cn/Article/CJFDTotal-GDGC198602007.htm
Ma J G, Yin Y L. The 778 tracking control system[J]. Opto-Electronic Engineering, 1986(1): 54–64. http://www.cnki.com.cn/Article/CJFDTotal-GDGC198602007.htm
[6] 傅承毓, 马佳光, 叶步霞, 等.复合轴控制系统应用研究[J].光电工程, 1998, 25(4): 1–12. http://www.cnki.com.cn/Article/CJFDTotal-GDGC804.000.htm
Fu C Y, Ma J G, Ye B X, et al. The application research of the composite axis control system[J]. Opto-Electronic Engineering, 1998, 25(4): 1–12. http://www.cnki.com.cn/Article/CJFDTotal-GDGC804.000.htm
[7] 王毅, 高伟志, 王贵文, 等.光电精密跟踪的双重复合轴伺服系统[J].光学 精密工程, 1996, 4(4): 58–61. http://www.cnki.com.cn/Article/CJFDTotal-gxjm604.010.htm
Wang Y, Gao W Z, Wang G W, et al. Dual compound axis servo system of opto-electronic precision tracking[J]. Optics and Precision Engineering, 1996, 4(4): 58–61. http://www.cnki.com.cn/Article/CJFDTotal-gxjm604.010.htm
[8] 王国民.天文光学望远镜轴系驱动方式发展概述[J].天文学进展, 2007, 25(4): 364–374. http://www.cqvip.com/Main/Detail.aspx?id=26090804
Wang G M. Review of drive style for astronomical optical telescope[J]. Progress in Astronomy, 2007, 25(4): 364–374. http://www.cqvip.com/Main/Detail.aspx?id=26090804
[9] Fujimoto Y, Murakami T, Oboe R. Advanced motion control for next-generation industrial applications[J]. IEEE Transactions on Industrial Electronics, 2016, 63(3): 1886–1888. doi: 10.1109/TIE.2016.2515992
[10] Sabanovic A. Challenges in motion control systems[J]. IEEJ Journal of Industry Applications, 2017, 6(2): 107–116. http://dx.doi.org/10.1541/ieejjia.6.107
[11] Campbell M F, Reese E O. SOAR 4.2-m telescope: evolution of drive and pointing performance from early predictions to final testing[J]. Proceedings of SPIE, 2003, 4837: 308–316. doi: 10.1117/12.456985
[12] Stepp L M. Advanced technology optical telescopes V[J]. Proceedings of SPIE, 1994, 2199: 117–125. doi: 10.1117/12.176182
[13] Li G P, Gu B Z, Yang D H, et al. Structure design and analysis of the special mounting and tracking system of the LAMOST[J]. Proceedings of SPIE, 2003, 4837: 284–294. doi: 10.1117/12.457957
[14] Du F J, Wang D X. The ultra-low speed research on friction drive of large telescope[J]. Proceedings of SPIE, 2006, 6274: 627410. doi: 10.1117/12.663713
[15] Rao C, Wei K, Zhang X, et al. First observations on the 127-element adaptive optical system for 1.8m telescope[J]. Proceedings of SPIE - The International Society for Optical Engineering, 2010, 7654: 76541H. https://spie.org/Publications/Proceedings/Paper/10.1117/12.866209?SSO=1
[16] Fugate R Q, Ruane R E, Ellerbroek B L. Advanced Technology Optical Telescopes V[J]. SPIE, 1994: 2–9.
[17] Paris N D. LQG/LTR tilt and tip control for the starfire optical range 3.5-meter telescope's adaptive optics system[M]. Captain, USAF, March 2006.
[18] Kimbrell J E, Greenwald D. AEOS 3.67-m telescope primary mirror active control system[J]. Proceedings of SPIE, 1998, 3352: 400–411. doi: 10.1117/12.319261
[19] Leonardi F, Venturini M, Vismara A. PM motors for direct driving optical telescope[J]. IEEE Industry Applications Magazine, 1996, 2(4): 10–16. doi: 10.1109/2943.503523
[20] Lewis H. Telescope control systems Ⅲ[J]. Proceedings of SPIE, 1998, 3351: 361–366. doi: 10.1117/12.308832
[21] Barnard T W, Fencil C R. Digital laser ranging and tracking using a compound axis servomechanism[J]. Applied Optics, 1966, 5(4): 497–505. doi: 10.1364/AO.5.000497
[22] 马佳光.捕获跟踪与瞄准系统的基本技术问题[J].光电工程, 1989(3): 1–10. http://www.cnki.com.cn/article/cjfdtotal-gdgc198903001.htm
Ma J G. The basic technologies of the acquisition, tracking and pointing systems[J]. Opto-Electronic Engineering, 1989(3): 1–10. http://www.cnki.com.cn/article/cjfdtotal-gdgc198903001.htm
[23] 马佳光, 唐涛.复合轴精密跟踪技术的应用与发展[J].红外与激光工程, 2013, 42(1): 218–227. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201301053.htm
Ma J G, Tang T. Review of compound axis servomechanism tracking control technology[J]. Infrared and Laser Engineering, 2013, 42(1): 218–227. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201301053.htm
[24] 王红红, 陈方斌, 寿少峻, 等.基于FSM的高精度光电复合轴跟踪系统研究[J].应用光学, 2010, 31(6): 909–913. http://www.cqvip.com/QK/71135X/201107/36140195.html
Wang H H, Chen F B, Shou S J, et al. High precision electro-optical tracking system based on fast steering mirror[J]. Journal of Applied Optics, 2010, 31(6): 909–913. http://www.cqvip.com/QK/71135X/201107/36140195.html
[25] 汪永阳.基于快速反射镜的高精度视轴稳定技术研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2016.
Wang Y Y. Research on high precision LOS stabilization technology based on fast steering mirror[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2016.
[26] 张士涛.音圈式大行程快速反射镜及其视轴稳定技术研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2019.
Zhang S T. Research on large-scale fast-steering-mirror driven by voice coil motor and its line-of-sight stabilization technology[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2019.
[27] 任戈.复合轴结构的运动关系分析[J].光电工程, 1995, 22(6): 41–46. http://www.cnki.com.cn/Article/CJFDTotal-GDGC506.006.htm
Ren G. An analysis of kinematic relationship for compound-axis structure[J]. Opto-Electronic Engineering, 1995, 22(6): 41–46. http://www.cnki.com.cn/Article/CJFDTotal-GDGC506.006.htm
[28] 吴琼雁, 王强, 彭起, 等.音圈电机驱动的快速控制反射镜高带宽控制[J].光电工程, 2004, 31(8): 15–18. doi: 10.3969/j.issn.1003-501X.2004.08.005
Wu Q Y, Wang Q, Peng Q, et al. Wide bandwidth control of fast-steering mirror driven by voice coil motor[J]. Opto-Electronic Engineering, 2004, 31(8): 15–18. doi: 10.3969/j.issn.1003-501X.2004.08.005
[29] 王强.高性能共轴跟踪系统工程应用研究[D].成都: 中国科学院光电技术研究所, 2007.
[30] 亓波, 陈洪斌, 任戈, 等. 100 km量子纠缠分发实验捕获跟踪技术[J].光学 精密工程, 2013, 21(6): 1628–1634. http://www.cnki.com.cn/Article/CJFDTotal-GXJM201306036.htm
Qi B, Chen H B, Ren G, et al. ATP technology for 100-kilometer quantum entanglement distribution experiment[J]. Optics and Precision Engineering, 2013, 21(6): 1628–1634. http://www.cnki.com.cn/Article/CJFDTotal-GXJM201306036.htm
[31] 刘兴法, 马佳光, 刘顺发, 等.视轴偏角对三轴光电跟踪系统跟踪过程的影响[J].光电工程, 2005, 32(5): 4–8. doi: 10.3969/j.issn.1003-501X.2005.05.002
Liu X F, Ma J G, Liu S F, et al. Effect of declination angle of sight axis on three-axis photoelectric tracking system[J]. Opto-Electronic Engineering, 2005, 32(5): 4–8. doi: 10.3969/j.issn.1003-501X.2005.05.002
[32] 徐征峰, 陈洪斌, 刘顺发, 等.视轴偏心三轴跟踪机架指向精度分析[J].光电工程, 2007, 34(4): 12–16. doi: 10.3969/j.issn.1003-501X.2007.04.003
Xu Z F, Chen H B, Liu S F, et al. Analysis for pointing error of three-axis photoelectric theodolite with collimation axis eccentricity[J]. Opto-Electronic Engineering, 2007, 34(4): 12–16. doi: 10.3969/j.issn.1003-501X.2007.04.003
[33] 唐涛, 钟代军, 包启亮, 等.一种三轴望远镜的跟踪控制方法: CN201210135959.7[P]. 2014-05-28.
Tang T, Zhong D J, Bao Q L, et al. Tracking control method of three-axis telescope[P]. 2014-05-28
[34] 葛志梁, 朱能鸿, 郑义劲.三轴无盲区望远镜机架方案[J].天文学进展, 2009, 27(2): 183–188. http://d.wanfangdata.com.cn/Periodical/twxjz200902007
Ge Z L, Zhu N H, Zheng Y J. The design of a 3-axis mount without blind area[J]. Progress in Astronomy, 2009, 27(2): 183–188. http://d.wanfangdata.com.cn/Periodical/twxjz200902007
[35] Hilkert J M. Inertially stabilized platform technology concepts and principles[J]. IEEE Control Systems Magazine, 2008, 28(1): 26–46. doi: 10.1109/MCS.2007.910256
[36] 毕永利.多框架光电平台控制系统研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2004.
Bi Y L. Study on control system of multi-frame photoelectric platform[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2004.
[37] 贾平, 张葆.航空光电侦察平台关键技术及其发展[J].光学 精密工程, 2003, 11(1): 82–88. http://d.wanfangdata.com.cn/Periodical/gxjmgc200301016
Jia P, Zhang B. Critical technologies and their development for airborne opto-electronic reconnaissance platforms[J]. Optics and Precision Engineering, 2003, 11(1): 82–88. http://d.wanfangdata.com.cn/Periodical/gxjmgc200301016
[38] 纪明.多环架光电稳定系统及分析[J].应用光学, 1994, 15(3): 60–64. http://www.cnki.com.cn/Article/CJFDTotal-YYGX403.018.htm
Ji M. Multiple-gimbal optical/electronical stabilization system and analysis[J]. Journal of Applied Optics, 1994, 15(3): 60–64. http://www.cnki.com.cn/Article/CJFDTotal-YYGX403.018.htm
[39] 申帅.宽频振动条件下航空光电平台视轴稳定技术研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2016.
Shen S. Study on optical axis stability technology of airborne photoelectric platform under broadband vibration condition[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2016.
[40] 叶盛祥, 谢德林, 杨虎, 等.光电对抗技术[J].光电工程, 2001, 28(1): 67–72. doi: 10.3969/j.issn.1003-501X.2001.01.016
Ye S X, Xie D L, Yang H, et al. Photo-countermeasures technique[J]. Opto-Electronic Engineering, 2001, 28(1): 67–72. doi: 10.3969/j.issn.1003-501X.2001.01.016
[41] Xia Y X, Bao Q L, Liu Z D. A new disturbance feedforward control method for electro-optical tracking system line-of-sight stabilization on moving platform[J]. Sensors, 2018, 18(12): 4350. doi: 10.3390/s18124350
[42] 夏运霞.运动平台中惯性稳定控制技术研究[D].成都: 中国科学院研究生院(光电技术研究所), 2013.
Xia Y X. Study on control techniques of inertial stabilization on moving platform[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2013.
[43] 毛耀.运动平台光电系统的视轴稳定技术研究[D].北京: 中国科学院大学, 2012.
[44] 魏伟.高精度机载光电平台视轴稳定技术研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2015.
Wei W. The research of optical axis stabilization of the airborne photoelectric platform[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2015.
[45] Tian J, Yang W S, Peng Z M, et al. Inertial sensor-based multiloop control of fast steering mirror for line of sight stabilization[J]. Optical Engineering, 2016, 55(11): 111602. doi: 10.1117/1.OE.55.11.111602
[46] Bahcall N A. The hubble space telescope[J]. Annals of the New York Academy of Sciences, 1986, 470(1): 331–337.
[47] Dunham E, Collins P, Reinacher A, et al. SOFIA image motion compensation[J]. Proceedings of SPIE, 2010, 7735: 77355X. doi: 10.1117/12.857731
[48] Ruderman M, Iwasaki M, Chen W H. Motion-control techniques of today and tomorrow: a review and discussion of the challenges of controlled motion[J]. IEEE Industrial Electronics Magazine, 2020, 14(1): 41–55. doi: 10.1109/MIE.2019.2956683
[49] Devasia S, Eleftheriou E, Moheimani S O R. A survey of control issues in nanopositioning[J]. IEEE Transactions on Control Systems Technology, 2007, 15(5): 802–823. doi: 10.1109/TCST.2007.903345
[50] Tang T, Niu S X, Ma J G, et al. A review on control methodologies of disturbance rejections in optical telescope[J]. Opto-Electronic Advances, 2019, 2(10): 190011.
[51] Zhao S, Gao Z Q. An active disturbance rejection based approach to vibration suppression in two‐inertia systems[J]. Asian Journal of Control, 2013, 15(2): 350–362. doi: 10.1002/asjc.552
[52] Chen X, Tomizuka M. Overview and new results in disturbance observer based adaptive vibration rejection with application to advanced manufacturing[J]. International Journal of Adaptive Control and Signal Processing, 2015, 29(11): 1459–1474. doi: 10.1002/acs.2546
[53] Hutchinson S, Hager G D, Corke P I. A tutorial on visual servo control[J]. IEEE Transactions on Robotics and Automation, 1996, 12(5): 651–670. doi: 10.1109/70.538972
[54] Sun X Y, Zhu X J, Wang P Y, et al. A review of robot control with visual servoing[C]//2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), 2018: 116–121.
[55] 唐涛, 黄永梅, 张桐, 等.负载加速度反馈的伺服系统谐振抑制[J].光电工程, 2007, 34(7): 14–17. doi: 10.3969/j.issn.1003-501X.2007.07.003
Tang T, Huang Y M, Zhang T, et al. Reduction of mechanical resonance based on load acceleration feedback for servo system[J]. Opto-Electronic Engineering, 2007, 34(7): 14–17. doi: 10.3969/j.issn.1003-501X.2007.07.003
[56] 邱晓波, 窦丽华, 单东升, 等.光电跟踪系统自抗扰伺服控制器的设计[J].光学 精密工程, 2010, 18(1): 220–226. http://www.cnki.com.cn/Article/CJFDTotal-GXJM201001032.htm
Qiu X B, Dou L H, Shan D S, et al. Design of active disturbance rejection controller for electro-optical tracking servo system[J]. Optics and Precision Engineering, 2010, 18(1): 220–226. http://www.cnki.com.cn/Article/CJFDTotal-GXJM201001032.htm
[57] 王婉婷, 郭劲, 姜振华, 等.光电跟踪自抗扰控制技术研究[J].红外与激光工程, 2017, 46(2): 0217003. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201702033.htm
Wang W T, Guo J, Jiang Z H, et al. Study on photoelectric tracking system based on ADRC[J]. Infrared and Laser Engineering, 2017, 46(2): 0217003. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201702033.htm
[58] Liu J, Li H W, Deng Y T. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control[J]. IEEE Transactions on Power Electronics, 2018, 33(4): 3655–3671. doi: 10.1109/TPEL.2017.2711098
[59] Tang T, Niu S X, Yang T, et al. Vibration rejection of Tip-Tilt mirror using improved repetitive control[J]. Mechanical Systems and Signal Processing, 2019, 116: 432–442. doi: 10.1016/j.ymssp.2018.06.060
[60] Tang T, Niu S X, Chen X Q, et al. Disturbance observer-based control of tip-tilt mirror for mitigating telescope vibrations[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68(8): 2785–2791. doi: 10.1109/TIM.2018.2869437
[61] Chen W H, Yang J, Guo L, et al. Disturbance-observer-based control and related methods—an overview[J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083–1095. doi: 10.1109/TIE.2015.2478397
[62] Wu C H, Paul R P. Manipulator compliance based on Joint torque control[C]//1980 19th IEEE Conference on Decision and Control including the Symposium on Adaptive Processes, 1980: 88–94.
[63] Luh J, Fisher W, Paul R. Joint torque control by a direct feedback for industrial robots[J]. IEEE Transactions on Automatic Control, 1983, 28(2): 153–161. doi: 10.1109/TAC.1983.1103215
[64] De Jager B. Acceleration assisted tracking control[J]. IEEE Control Systems Magazine, 2002, 14(5): 20–27.
[65] Younkin G W. Compensating structural dynamics for servo driven industrial machines with acceleration feedback[C]//Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, 2004.
[66] Han J D, Wang Y C, Tan D L, et al. Acceleration feedback control for direct-drive motor system[C]//2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000), 2000.
[67] Han J A, Qiu Z C, Wang Y C, et al. Discontinuous control for harmonic drive system with the damping enhancement of acceleration feedback[C]//1999 IEEE Canadian Conference on Electrical and Computer Engineering, 1999.
[68] Xu W L, Han J D, Tso S K, et al. Contact transition control via joint acceleration feedback[J]. IEEE Transactions on Industrial Electronics, 2000, 47(1): 150–158. doi: 10.1109/41.824137
[69] Andersen T, Zurbuchen R. Acceleration feedback applied to the 3.6 m telescope servosystem[R]. ESO Technical Report No. 7, 1976.
[70] Sedghi B, Bauvir B, Dimmler M. Acceleration feedback control on an AT[J]. Proceedings of SPIE, 2008, 7012: 70121Q. doi: 10.1117/12.789333
[71] Ren W, Deng C, Mao Y, et al. Virtual velocity loop based on MEMS accelerometers for optical stabilization control system[J]. Optical Engineering, 2017, 56(8): 085101. doi: 10.1117/1.OE.56.8.085101
[72] Choi Y J, Yang K, Chung W K, et al. On the robustness and performance of disturbance observers for second-order systems[J]. IEEE Transactions on Automatic Control, 2003, 48(2): 315–320. doi: 10.1109/TAC.2002.808491
[73] Kim B K, Chung W K. Advanced disturbance observer design for mechanical positioning systems[J]. IEEE Transactions on Industrial Electronics, 2003, 50(6): 1207–1216. doi: 10.1109/TIE.2003.819695
[74] Shim H, Jo N H. An almost necessary and sufficient condition for robust stability of closed-loop systems with disturbance observer[J]. Automatica, 2009, 45(1): 296–299. doi: 10.1016/j.automatica.2008.10.009
[75] Deng C, Tang T, Mao Y, et al. Enhanced disturbance observer based on acceleration measurement for fast steering mirror systems[J]. IEEE Photonics Journal, 2017, 9(3): 6802211. https://ieeexplore.ieee.org/document/7904704
[76] Wang Q, Cai H X, Huang Y M, et al. Acceleration feedback control (AFC) enhanced by disturbance observation and compensation (DOC) for high precision tracking in telescope systems[J]. Research in Astronomy and Astrophysics, 2016, 16(8): 51–60.
[77] Tang T, Zhang T, Du J F, et al. Acceleration feedback of a current-following synchronized control algorithm for telescope elevation axis[J]. Research in Astronomy and Astrophysics, 2016, 16(11): 7–12.
[78] Tang T, Chen S, Huang X L, et al. Combining load and motor encoders to compensate nonlinear disturbances for high precision tracking control of gear-driven gimbal[J]. Sensors, 2018, 18(3): 754. doi: 10.3390/s18030754
[79] Kennedy P J, Kennedy R L. Direct versus indirect line of sight (LOS) stabilization[J]. IEEE Transactions on Control Systems Technology, 2003, 11(1): 3–15. doi: 10.1109/TCST.2002.806443
[80] Hilkert J M. A comparison of inertial line-of-sight stabilization techniques using mirrors[J] Proceedings of SPIE, 2004, 5430: 13–22. doi: 10.1117/12.541808
[81] 洪华杰, 王学武, 翁干飞.光电侦察装备中的反射镜稳定技术[J].应用光学, 2011, 32(4): 591–597. http://www.cnki.com.cn/Article/CJFDTotal-YYGX201104003.htm
Hong H J, Wang X W, Weng G F. Mirror stabilization in electro-optical reconnaissance system[J]. Journal of Applied Optics, 2011, 32(4): 591–597. http://www.cnki.com.cn/Article/CJFDTotal-YYGX201104003.htm
[82] Satyarthi S. Optical line-of-sight steering using gimbaled mirrors[J]. Proceedings of SPIE, 2014, 9076: 90760E.
[83] Hilkert J M, Cohen S. Development of mirror stabilization line-of-sight rate equations for an unconventional sensor-to-gimbal orientation[J]. Proceedings of SPIE, 2009, 7338: 733803-01–733803-12.
[84] Luniewicz M F, Murphy J, O'Neil E, et al. Testing the inertial pseudo-star reference unit[J]. Proceedings of SPIE, 1994, 2221: 638–649. doi: 10.1117/12.178969
[85] Algrain M C, Woehrer M K. Determination of attitude jitter in small satellites[J]. Proceedings of SPIE, 1996, 2739: 215–228. doi: 10.1117/12.241918
[86] Walter R E, Danny H, Donaldson J. Stabilized inertial measurement system (SIMS)[J]. Proceedings of SPIE, 2002, 4724: 57–68. doi: 10.1117/12.472362
[87] Eckelkamp-Baker D, Sebesta H R. Optical inertial reference unit for kilohertz bandwidth submicroradian optical pointing and jitter control: 20050161578[P]. 2005-07-28.
[88] 胡浩军.运动平台捕获、跟踪与瞄准系统视轴稳定技术研究[D].长沙: 国防科学技术大学, 2005.
Hu H J. Line-of-sight stabilization of acquisition, tracking and pointing system on moving bed[D]. Changsha: National University of Defense Technology, 2005.
[89] Mao Y, Ren W, Yu W, et al. Characteristic analysis and robust control design of double-stage precision stabilized platform[J]. Sensors and Actuators A: Physical, 2019, 300: 111636. doi: 10.1016/j.sna.2019.111636
[90] Tursun M, Eşkinat E. Suppression of vibration using passive receptance method with constrained minimization[J]. Shock and Vibration, 2008, 15(6): 639–654. doi: 10.1155/2008/858307
[91] Thorby D. Structural Dynamics and Vibration in Practice[M]. Amsterdam: Elsevier/Butterworth-Heinemann, 2008: 21–22.
[92] De Marneffe B. Active and passive vibration isolation and damping via shunted transducers[D]. Brussels: Universite Libre de Bruxelles, 2007: 67–69, 112–116.
[93] Lin Z C, Liu K, Zhang W. Inertially stabilized platform for airborne remote sensing using magnetic bearings[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(1): 288–301. https://ieeexplore.ieee.org/document/7140807
[94] De Marneffe B, Avraam M, Deraemaeker A, et al. Vibration isolation of precision payloads: a six-axis electromagnetic relaxation isolator[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(2): 395–401. doi: 10.2514/1.39414
[95] Mashayekhi M J, Vahdati N. Application of tuned vibration absorbers in fluid mounts[J]. Shock and Vibration, 2009, 16(6): 565–580. doi: 10.1155/2009/672394
[96] Trankle T, Pedreiro N, Andersen G. Disturbance free payload flight system analysis and simulation methods[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004.
[97] Dewell L, Pedreiro N, Blaurock C, et al. Precision telescope pointing and spacecraft vibration isolation for the terrestrial planet finder coronagraph[J]. Proceedings of SPIE, 2005, 5899: 589902. doi: 10.1117/12.618939
[98] Chen C C, Hemmati H, Biswas A, et al. Simplified lasercom system architecture using a disturbance-free platform[J]. Proceedings of SPIE, 2006, 6105: 610505. doi: 10.1117/12.660264
[99] Pedreiro N, Carrier A, Lorell K, et al. Disturbance-free payload concept demonstration[C]//AIAA Guidance, Navigation, and Conference Control and Exhibit, 2002.
[100] 王晓明.基于六维并联机构的空间光学载荷微振动环境模拟及指向稳定技术研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2019.
Wang X M. Research on micro-vibration environment simulation and pointing stability technology of the space optical pavload based on six-DOF parallel mechanism[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2019.
[101] Li W P, Huang H. Integrated optimization of actuator placement and vibration control for piezoelectric adaptive trusses[J]. Journal of Sound and Vibration, 2013, 332(7): 17–32.
[102] 赵浩.双体卫星在指向控制中的建模与仿真研究[D].哈尔滨: 哈尔滨工业大学, 2013.
Zhao H. Study on modeling and simulation of a satellite with a architecture of disturbance free payload in pointing control[D]. Harbin: Harbin Institute of Technology, 2013.
[103] 杜超.一种双体卫星的动力学建模与控制研究[D].哈尔滨: 哈尔滨工业大学, 2015.
Du C. Study on dynamic modeling and controlling if a satellite with a architecture of disturbance free payload[D]. Harbin: Harbin Institute of Technology, 2015.
[104] Yun H, Liu L, Li Q, et al. Investigation on two-stage vibration suppression and precision pointing for space optical payloads[J]. Aerospace Science and Technology, 2020, 96: 105543. doi: 10.1016/j.ast.2019.105543
[105] Antonello R, Branz F, Sansone F, et al. High precision dual-stage pointing mechanism for miniature satellite laser communication terminals[J]. IEEE Transactions on Industrial Electronics, 2020, doi: 10.1109/TIE.2020.2972452.
[106] Kaymak Y, Rojas-Cessa R, Feng J H, et al. A survey on acquisition, tracking, and pointing mechanisms for mobile free-space optical communications[J]. IEEE Communications Surveys & Tutorials, 2018, 20(2): 1104–1123.
[107] Talmor A G, Harding Jr H, Chen C C. Two-axis gimbal for air-to-air and air-to-ground laser communications[J]. Proceedings of SPIE, 2016, 9739: 97390G. doi: 10.1117/12.2218097
[108] 王建立.光电经纬仪电视跟踪、捕获快速运动目标技术的研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2002.
Wang J L. Study on TV tracking system of O-E theodolite to track and acquire fast moving targets[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2002.
[109] 王建立, 陈涛, 陈娟, 等.提高光电经纬仪跟踪快速运动目标能力的一种方法[J].光电工程, 2002, 29(1): 34–37. doi: 10.3969/j.issn.1003-501X.2002.01.010
Wang J L, Chen T, Chen J, et al. A method for improving the tracking ability of a photoelectric theodolite against the fast moving targets[J]. Opto-Electronic Engineering, 2002, 29(1): 34–37. doi: 10.3969/j.issn.1003-501X.2002.01.010
[110] 王超.预测技术在光电跟踪系统中的应用研究[D].长春: 长春理工大学, 2013.
Wang C. Application research of prediction technology on optoelectronic tracking system[D]. Changchun: Changchun University of Science and Technology, 2013.
[111] 黄永梅, 马佳光, 付承毓.目标速度预测在光电跟踪控制系统中的应用[J].红外与激光工程, 2004, 33(5): 477–481. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ200405010.htm
Huang Y M, Ma J G, Fu C Y. Application of forecast of moving target velocity in electro-optical tracking control system[J]. Infrared and Laser Engineering, 2004, 33(5): 477–481. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ200405010.htm
[112] 徐智勇, 傅承毓, 王满意, 等.用拟合函数法准确预测运动目标的轨迹[J].光电工程, 2000, 27(1): 17–19. doi: 10.3969/j.issn.1003-501X.2000.01.004
Xu Z Y, Fu C Y, Wang M Y, et al. Accurate prediction for trace of a moving target with fitting function method[J]. Opto-Electronic Engineering, 2000, 27(1): 17–19. doi: 10.3969/j.issn.1003-501X.2000.01.004
[113] 杨秀华.预测滤波技术在光电目标跟踪中的应用研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2004.
Yang X H. Application research of prediction filtering technology on optoelectronic traget tracking[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2004.
[114] 刘廷霞.光电跟踪系统复合轴伺服控制技术的研究[D].长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2005.
Liu T X. The research of compound-axis servo control technique of O-E Tracking system[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2005.
[115] Majhi S, Atherton D P. Modified Smith predictor and controller for processes with time delay[J]. IEE Proceedings-Control Theory and Applications, 1999, 146(5): 359–366. doi: 10.1049/ip-cta:19990502
[116] Feliu-Batlle V, Pérez R R, García F J C, et al. Smith predictor based robust fractional order control: application to water distribution in a main irrigation canal pool[J]. Journal of Process Control, 2009, 19(3): 506–519. doi: 10.1016/j.jprocont.2008.05.004
[117] Ren W, Luo Y, He Q N, et al. Stabilization control of electro-optical tracking system with fiber-optic gyroscope based on modified smith predictor control scheme[J]. IEEE Sensors Journal, 2018, 18(19): 8172–8178. doi: 10.1109/JSEN.2018.2835147
[118] Hurák Z, Řezáč M. Delay compensation in a dual-rate cascade visual servomechanism[C]//49th IEEE Conference on Decision and Control (CDC), 2010.
[119] Zhou X, Mao Y, Zhang C, et al. A comprehensive performance improvement control method by fractional order control[J]. IEEE Photonics Journal, 2018, 10(5): 7906811. https://ieeexplore.ieee.org/document/8434365
[120] Tang T, Cai H X, Huang Y M, et al. Combined line-of-sight error and angular position to generate feedforward control for a charge-coupled device–based tracking loop[J]. Optical Engineering, 2015, 54(10): 105107. doi: 10.1117/1.OE.54.10.105107
[121] Tao T, Ren G, Ma J G, et al. Compensating for some errors related to time delay in a charge-coupled-device-based fast steering mirror control system using a feedforward loop[J]. Optical Engineering, 2010, 49(7): 073005. doi: 10.1117/1.3467453
[122] Tao T, Tian J, Zhong D J, et al. Combining charge couple devices and rate sensors for the feedforward control system of a charge coupled device tracking loop[J]. Sensors, 2016, 16(7): 968. doi: 10.3390/s16070968
[123] Tang T, Yang T, Qi B, et al. Error-based feedforward control for a charge-coupled device tracking system[J]. IEEE Transactions on Industrial Electronics, 2019, 66(10): 8172–8180. doi: 10.1109/TIE.2018.2884239
[124] Ren W, Mao Y, Li Z J, et al. Error-based feedforward control for optoelectronic tracking system[C]//2019 Chinese Automation Congress (CAC), 2019: 460–465.
[125] Atsumi T, Yabui S. Quadruple-stage actuator system for magnetic-head positioning system in hard disk drives[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 9184–9194. https://ieeexplore.ieee.org/document/8917815
[126] Olfati-Saber R. Flocking for multi-agent dynamic systems: algorithms and theory[J]. IEEE Transactions on Automatic Control, 2006, 51(3): 401–420. doi: 10.1109/TAC.2005.864190
[127] Li T, Zhang J F. Consensus conditions of multi-agent systems with time-varying topologies and stochastic communication noises[J]. IEEE Transactions on Automatic Control, 2010, 55(9): 2043–2057. doi: 10.1109/TAC.2010.2042982
[128] Tang Y, Gao H J, Zou W, et al. Distributed synchronization in networks of agent systems with nonlinearities and random switchings[J]. IEEE Transactions on Cybernetics, 2013, 43(1): 358–370. doi: 10.1109/TSMCB.2012.2207718
[129] You K Y, Xie L H. Network topology and communication data rate for consensusability of discrete-time multi-agent systems[J]. IEEE Transactions on Automatic Control, 2011, 56(10): 2262–2275. doi: 10.1109/TAC.2011.2164017
[130] Olfati-Saber R. Distributed Kalman filter with embedded consensus filters[C]//Proceedings of the 44th IEEE Conference on Decision and Control, 2006.
[131] Hu J W, Xie L H, Zhang C S. Diffusion Kalman filtering based on covariance intersection[J]. IEEE Transactions on Signal Processing, 2012, 60(2): 891–902. doi: 10.1109/TSP.2011.2175386
[132] 宋世军, 罗锦锋.基于信息融合的光电跟踪系统高精度控制方法[J].激光杂志, 2019, 40(6): 154–157. http://www.cnki.com.cn/Article/CJFDTotal-JGZZ201906032.htm
Song S J, Luo J F. High precision control method of photoelectric tracking system based on information fusion[J]. Laser Journal, 2019, 40(6): 154–157. http://www.cnki.com.cn/Article/CJFDTotal-JGZZ201906032.htm
[133] Jasperneite J, Sauter T, Wollschlaeger M. Why we need automation models: handling complexity in industry 4.0 and the internet of things[J]. IEEE Industrial Electronics Magazine, 2020, 14(1): 29–40. doi: 10.1109/MIE.2019.2947119
[134] Monmasson E, Idkhajine L, Naouar M W. FPGA-based controllers[J]. IEEE Industrial Electronics Magazine, 2011, 5(1): 14–26. doi: 10.1109/MIE.2011.940250
[135] Jovanovic N, Martinache F, Guyon O, et al. The subaru coronagraphic extreme adaptive optics system: enabling high-contrast imaging on solar-system scales[J]. Publications of the Astronomical Society of the Pacific, 2015, 127(955): 890–910. doi: 10.1086/682989
[136] Rao C H, Gu N T, Zhu L, et al. 1.8-m solar telescope in China: Chinese large solar telescope[J]. Journal of Astronomical Telescopes, Instruments, and Systems, 2015, 1(2): 024001. doi: 10.1117/1.JATIS.1.2.024001
-
 下载:
下载:





 点击扫一扫
点击扫一扫

图(45)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


