
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
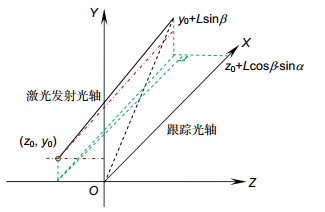
针对激光光轴与经纬仪跟踪光轴的轴间距离(移轴)以及光轴平行性误差造成经纬仪跟踪位置与激光指向位置不一致问题开展研究。对离轴和平行性误差的影响进行了分析,表明大的移轴量和平行性误差将导致激光指向和经纬仪跟踪指向的不一致,进而导致激光测距盲区增大、作用距离下降、目标定位精度降低等问题。提出一种基于偏置跟踪的激光指向动态修正方法,通过使目标始终位于激光光束中心,同时使得激光测距位置和经纬仪跟踪锁定位置保持一致,有效解决了激光边缘能量下降对作用距离的影响,针对某型经纬仪可使目标的测距盲区从1 km下降到82 m。同时针对偏置跟踪算法需要目标初始距离以启动偏置跟踪的问题,提出初始距离未知目标一维搜索方法,大大提高了对初始距离未知目标的搜索效率。本文方法较好地解决了经纬仪跟踪位置与激光指向位置的一致性问题,大大降低了对激光光轴与经纬仪跟踪光轴的移轴与平行性限制。
 Abstract:
Abstract:The distance between the laser optical axis and the tracking optical axis of the theodolite (axis shift) and the parallelism error of the optical axis cause the tracking position of the theodolite to be inconsistent with the laser pointing position.The analysis of the influence of off-axis and parallelism errors shows that a large amount of shift and parallelism errors will lead to inconsistencies between the laser pointing and the theodolite tracking pointing, which in turn leads to an increase in the blind zone of the laser ranging, a decrease in the operating distance and the accuracy of target positioning. A dynamic correction method for laser pointing based on bias tracking is proposed. By keeping the target always at the center of the laser beam and keeping the laser ranging position consistent with the theodolite tracking and locking position, it effectively solves the effect of laser edge energy drop on the operating distance. For a certain type of theodolite, the blind spot of the target can be reduced from 1 km to 82 m. At the same time, in view of the problem that the bias tracking algorithm needs the initial distance of the target to start the bias tracking, a one-dimensional search method for the target with unknown initial distance is proposed, which greatly improves the search efficiency of the target with unknown initial distance. The method in this paper solves the problem of the consistency between the tracking position of the theodolite and the pointing position of the laser, and greatly reduces the limitation on the shift and parallelism of the laser optical axis and the theodolite tracking optical axis.
-

Overview: As using laser ranger on theodolite to measuring the target's location in range test, it's common that the laser optical axis is a large distance (off-boresight) and weak parallelism with the tracking optical axis. It means that the location of laser pointing and the location of theodolite tracking is different. The influences of off-boresight and parallelism error are analyzed first. A broader off-boresight can cause larger ranging bind regions. The parallelism error may decrease the detecting distance when it corresponds to the laser divergence, and the laser pointing location is changing as the target moving, this decreases the accuracy of the location. It's common to decrease the off-boresight and parallelism error of the laser optical axis. But large off-boresight and parallelism error are unavoidable for some cases. A laser pointing dynamic correction method based on bias tracking is prompt to make the laser pointing the same with theodolite tracking. It keeps the target in the center of the laser beam by bais tracking other than in the center of the tracking field of view. As the laser is gauss distribution, the target in the center of the laser beam reflects more laser energy, this helps to increase the operating distance of laser ranger. It can decrease the blind region of the laser range greatly by changing the laser pointing and always aiming at the target. To a theodolite with 0.627°×0.470° tracking field of view and 590 mm off-boresight, it can reduce the blind region from 1000 meters to 82 meters. As the track locking location is the same with the laser pointing location, it helps to increase the location accuracy. When the original distance is unknown, it has to search the distance of the target. A one-dimensional search method for distance unknown target is prompted too. As it searches the target only in distance, it scans only a single line in the imaging field. So it can decrease the points of searching and improve the searching efficiency greatly comparing to traditional two-dimensional searching methods. For an imaging field of 3.7°×2.9° and searching step of 0.014°, it can reduce the scanning points from 258×202 points to 128 points. Thus by bias tracking and one-dimensional searching, the consistency of laser pointing and theodolite tracking is overcome. It releases the limits of off borsights and parallelism error to the laser optical axis and tracking optical axis. This helps to decrease the cost of theodolite, and is valuable to improve the accuracy of exterior trajectory parameters.
-

-
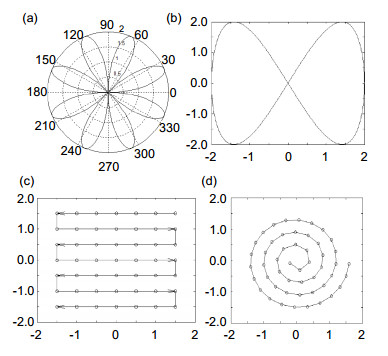
图 6 搜索扫描曲线。(a)玫瑰扫描; (b)利萨如扫描;(c)逐行扫描;(d)螺旋扫描
Figure 6. Searching cure. (a) Rose curve scanning, (b) Lissajous curve; (c) Branch scanning; (d) Spiral scanning
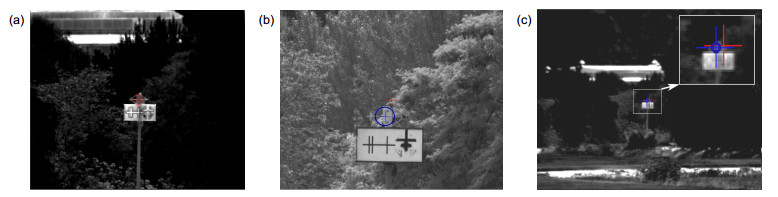
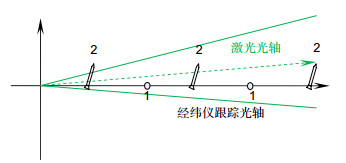
图 8 激光束中心目标成像位置。(a)模拟激光束及激光光轴指向;(b)可见光成像系统中的成像;(c)在红外捕获系统中的成像
Figure 8. The imaging location of target in center of laser beam. (a) Simulating laser beam and its pointing; (b) The imaging location in visible imaging system; (c) The imaging location in infrared capture system
-
[1] 丁宇星, 李永富, 刘鸿彬, 等.基于InGaAs探测器的日光条件光子计数试验[J].中国激光, 2018, 45(11): 1104003. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201811021
Ding Y X, Li Y F, Liu H B, et al. Photo counting experiment based on InGaAs detector in daylight[J]. Chinese Journal of Lasers, 2018, 45(11): 1104003. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201811021
[2] 谢庚承, 叶一东, 雒仲祥, 等.飞行目标脉冲激光测距的回光稳定性[J].激光与光电子学进展, 2018, 55(9): 091207. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jgygdzxjz201809028
Xie G C, Ye Y D, Luo Z X, et al. Light echo stability of pulsed laser ranging of flight targets[J]. Laser & Optoelectronics Progress, 2018, 55(9): 091207. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jgygdzxjz201809028
[3] 张兴国, 韩涛, 李靖.舰载环境下光电经纬仪的引导与实现[J].光电工程, 2017, 44(5): 511–515. doi: 10.3969/j.issn.1003-501X.2017.05.006
Zhang X G, Han T, Li J. Guidance and implementation of photoelectric theodolite in shipborne environment[J]. Opto-Electronic Engineering, 2017, 44(5): 511–515. doi: 10.3969/j.issn.1003-501X.2017.05.006
[4] 谭碧涛.跟踪发射望远镜共光路成像探测性能研究[D].成都: 中国科学院研究生院(光电技术研究所), 2016: 2–4.
Tan B T. Study on imaging and detecting performance of telescopes for tracking and launching in common path[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2016: 2–4.
http://cdmd.cnki.com.cn/Article/CDMD-80151-1016757846.htm [5] 李晶, 车英, 王加安, 等.折反射共光路多谱段激光雷达光学系统设计[J].中国激光, 2018, 45(5): 0510008. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201805037
Li J, Che Y, Wang J A, et al. Optical system design for multi-spectral laser radar with refraction and reflection in Co-path[J]. Chinese Journal of Lasers, 2018, 45(5): 0510008. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201805037
[6] 赛奥里斯.导弹制导与控制系统[M].张天光, 译.北京: 国防工业出版社, 2010.
Simirk G M. Missile Guidance and Control Systems[M]. Zhang T G, trans. Beijing: National Defense Industry Press, 2010.
[7] 配合滚仰式跟踪平台的偏置+比例复合导引律[J].信息系统工程, 2011(6): 144–145. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xxxtgc201106067
[8] 方斌.红外成像导引头抗干扰研究[J].弹箭与制导学报, 2003, 23(4): 19–21. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=djyzdxb200304006
Fang B. Study on ⅡR seeker CCM[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2003, 23(4): 19–21. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=djyzdxb200304006
[9] 张海波, 马勇辉, 季东, 等.一种提高光电跟踪设备捕获概率的搜索方法[J].红外与激光工程, 2016, 45(2): 0217003. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwyjggc201602029
Zhang H B, Ma Y H, Ji D, et al. Search method to improve acquisition probability for optoelectronic tracking device[J]. Infrared and Laser Engineering, 2016, 45(2): 0217003. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwyjggc201602029
[10] 陈德毅.三轴光电跟踪设备对在轨目标捕获策略的研究[D].成都: 中国科学院光电技术研究所, 2018: 39–43.
Chen D Y. Study on the acquisition strategy of three-axis photoelectric tracking equipment on orbit[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2018: 39–43.
http://cdmd.cnki.com.cn/Article/CDMD-80151-1018828912.htm -
 下载:
下载:




 点击扫一扫
点击扫一扫
图(9)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


