
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要
随着单光子探测器件及技术的快速发展,具有光子级高灵敏度探测能力的单光子激光雷达已成为研究热点,并在遥感测绘、智能驾驶和消费电子等领域发挥日益重要的作用。本文聚焦于采用单光子雪崩光电二极管探测器的激光雷达技术与系统,介绍了脉冲累积、编码调制和啁啾调制三种单光子激光雷达探测原理。考虑到单光子探测器与处理算法的重要性,概述了单光子探测器的发展现状,以及典型的信号处理算法,并梳理了单光子激光雷达在远距离探测、复杂场景探感、星载/机载测绘遥感、智能驾驶导航避障和消费电子3D感知等领域的应用情况和典型系统实例。最后,分析展望了单光子激光雷达技术在器件、算法、系统和应用领域的未来发展趋势及面临的潜在挑战。
-
关键词:
- 激光雷达 /
- 信号处理 /
- 光子计数 /
- 单光子雪崩光电二极管
Abstract
With the rapid development of single-photon detectors and technologies, single-photon LiDAR with photon-level sensitivity has become a popular research topic. It plays an increasingly important role in fields such as remote sensing and mapping, intelligent driving, and consumer electronics. This paper focuses on LiDAR technologies and systems employing single-photon avalanche diode detectors, introducing three single-photon LiDAR detection principles: pulse accumulation, coding modulation and chirp modulation. Considering the importance of detectors and algorithms, it outlines the current development status of single-photon detectors and typical processing algorithms. It also reviews the applications and typical systems of single-photon LiDAR in long-distance detection, complex scene sensing, satellite/airborne remote sensing and mapping, intelligent driving navigation and obstacle avoidance, and 3D sensing in consumer electronics. Lastly, the paper analyzes the future development trends and forecasts the potential challenges of single-photon LiDAR technology in detectors, algorithms, systems, and application domains.
-
Overview
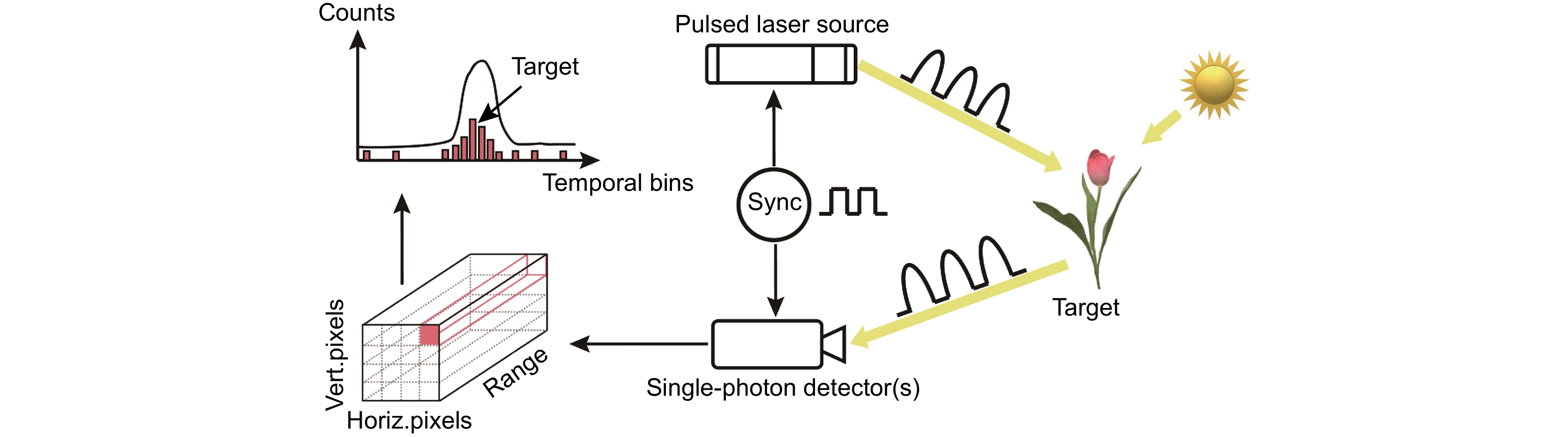
Overview: LiDAR (Light Detection and Ranging) is an active remote sensing technology that can accurately and quickly acquire the three-dimensional spatial information of objects. Compared with traditional linear-mode LiDAR, single-photon LiDAR, especially those based on Single-Photon Avalanche Diodes (SPAD), represents an emerging technology with high temporal resolution, high sensitivity, and ease of integration. Due to its unique technological advantages in capturing weak signals and high-precision 3D imaging, it is widely applied in military, aerospace, and autonomous driving fields. In recent years, the continuous development of SPAD detectors has driven the vigorous development and rapid performance improvement of various single-photon LiDAR systems. Furthermore, the single-photon imaging algorithm has evolved from single-point signal processing to array image reconstruction. By exploring the spatiotemporal correlation between pixels, it can accurately restore the depth information carried by weak signals from high background noise. The introduction of deep-learning-based approaches with single-photon imaging prior knowledge has also become one of the current research hotspots. Meanwhile, thanks to powerful imaging algorithms, advanced optomechanical structures, and efficient system designs, they have significantly improved detection accuracy and speed and promoted the application scope of single-photon imaging systems from traditional satellite and airborne applications to vehicle-mounted and consumer electronics fields.
This article focuses on LiDAR technology based on SPAD. Starting from the basic principles, it introduces single-photon LiDAR technology and three typical technical systems, including pulse accumulation time-of-flight technology, coded modulation time-of-flight technology, and chirp modulation coherent detection technology. Based on this, the article highlights SPAD detectors, illustrates the research progress of Si SPAD and InGaAs/InP SPAD, and discusses classical imaging algorithms and typical prior assumptions. Moreover, this review looks back on the current development of single-photon LiDAR in long-distance detection, complex scene sensing, satellite/airborne mapping remote sensing, intelligent driving navigation and obstacle avoidance, and consumer electronics 3D perception, organizing typical systems in different application fields and platforms. Finally, based on current research hotspots and pain points, this article summarizes the main development trends of single-photon detection technology in detectors, imaging algorithms, system integration, and application fields. Of course, single-photon LiDAR also faces challenges such as distance ambiguity and pile-up effects. Therefore, in the design of single-photon LiDAR systems, adopting the concept of computational imaging based on application needs and jointly optimizing the system architecture, optical transmission and reception system, and 3D imaging algorithms might be a beneficial approach. It is hoped that this paper can provide some references for readers to understand the development and design of single-photon LiDAR systems.
-

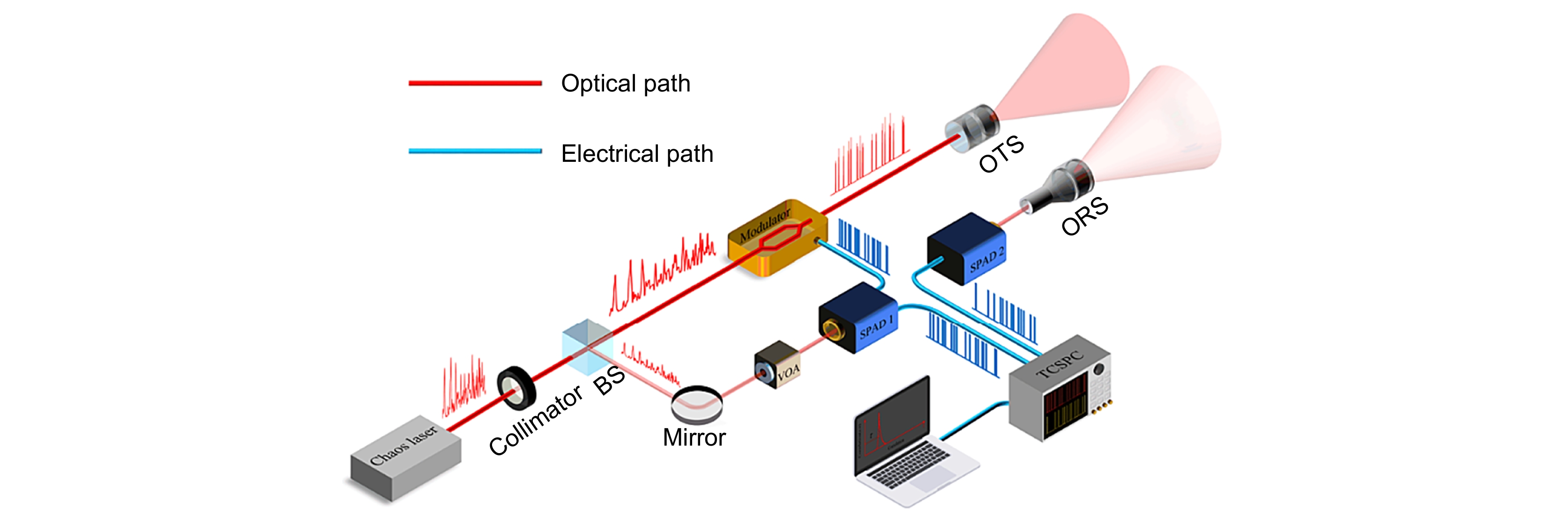
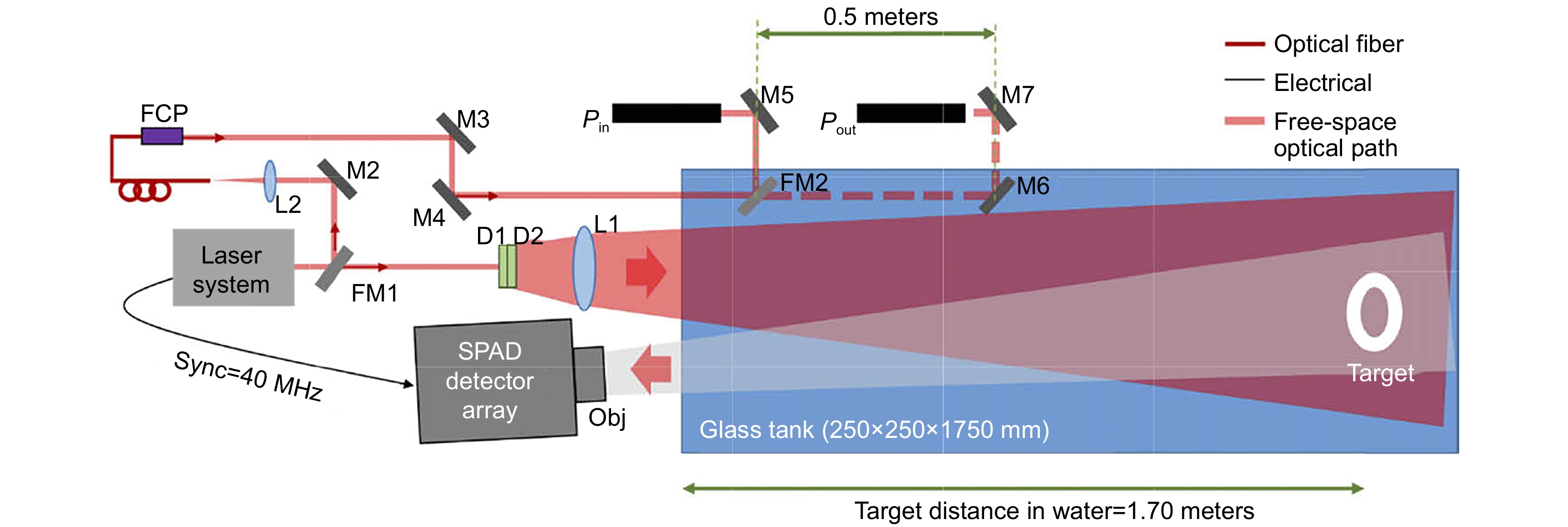
-
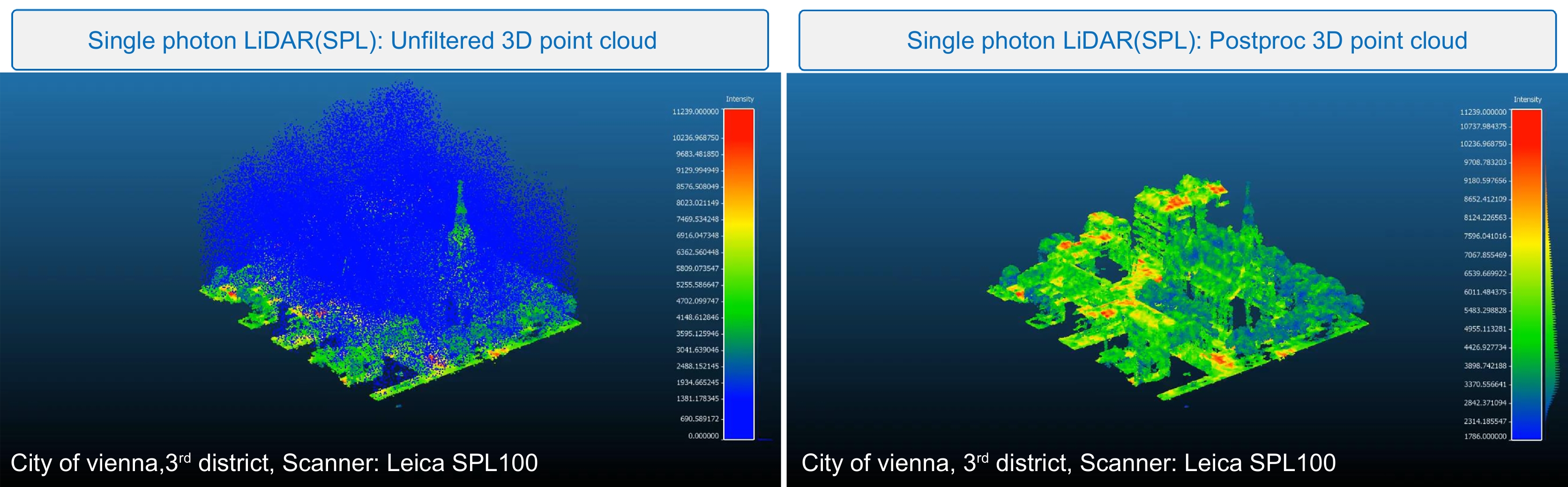
图 7 SPL100数据处理前后点云去噪效果图
Figure 7. Point cloud before and after data processing for the SPL100
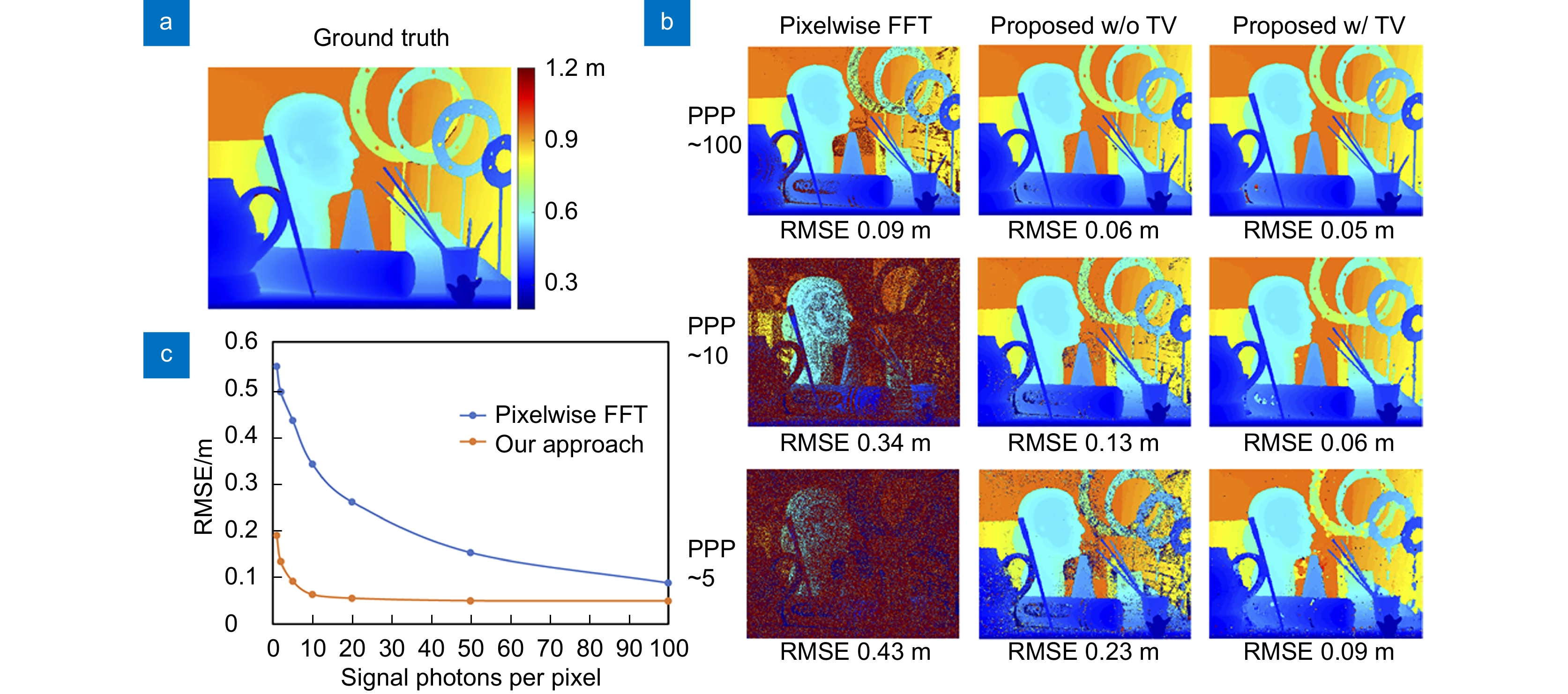
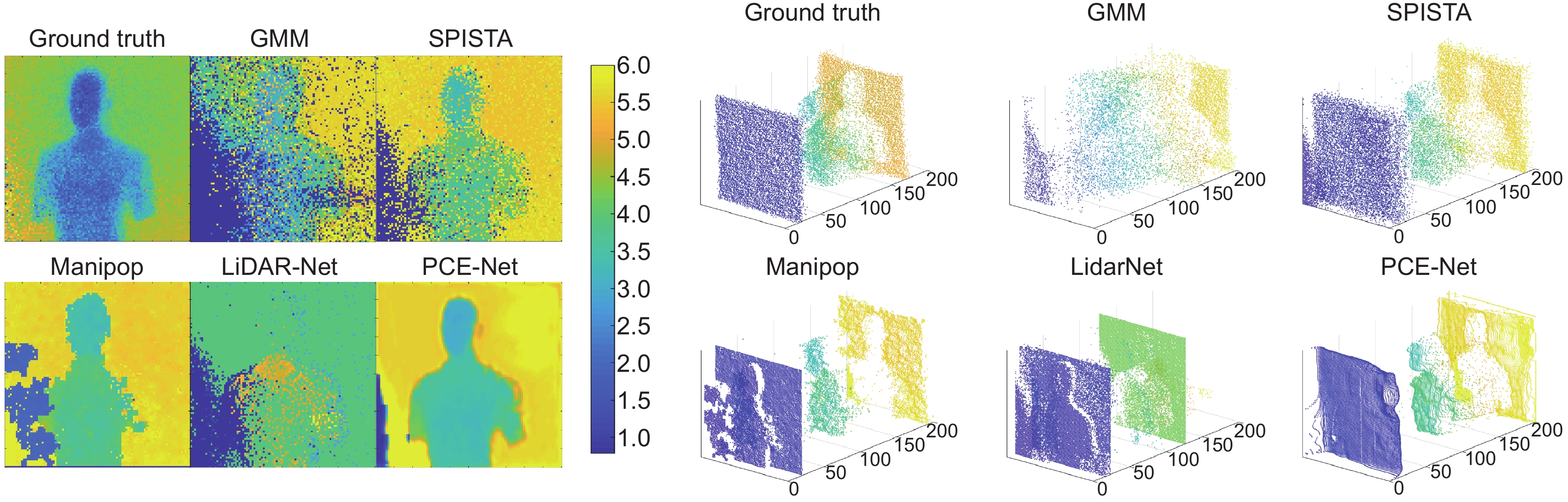
图 8 啁啾调制单光子激光雷达的成像算法效果图[61]。(a) 目标场景“Art”的精确深度图;(b) 不同条件下不同算法成像效果;(c)不同方法的光子利用率
Figure 8. Imaging algorithm effect diagrams of chirp modulated single-photon LiDAR[61]. (a) Accurate depth map of the target scene “Art”; (b) Performance comparisons of different methods with various conditions; (c) Photon efficiency of different approaches
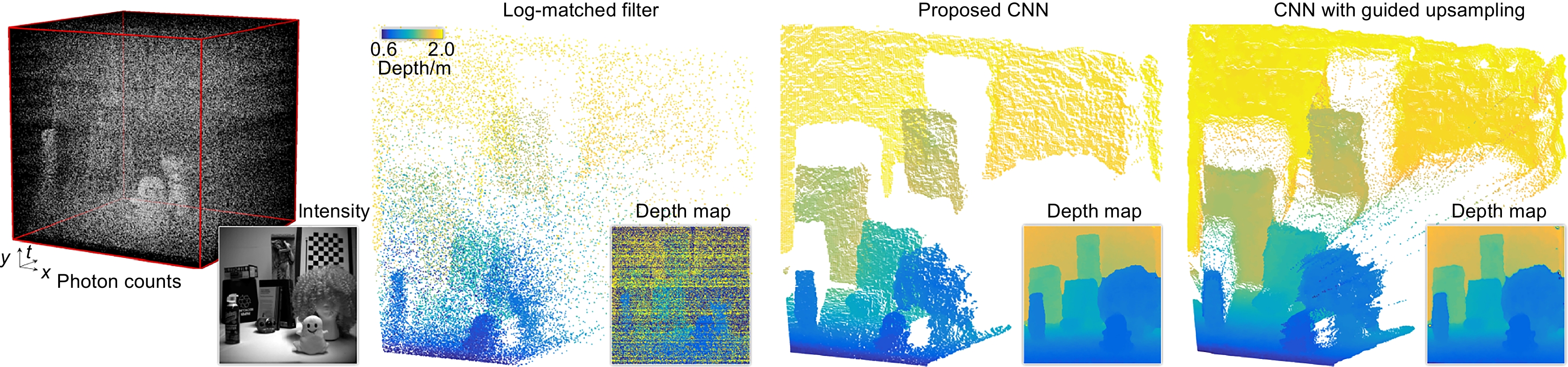
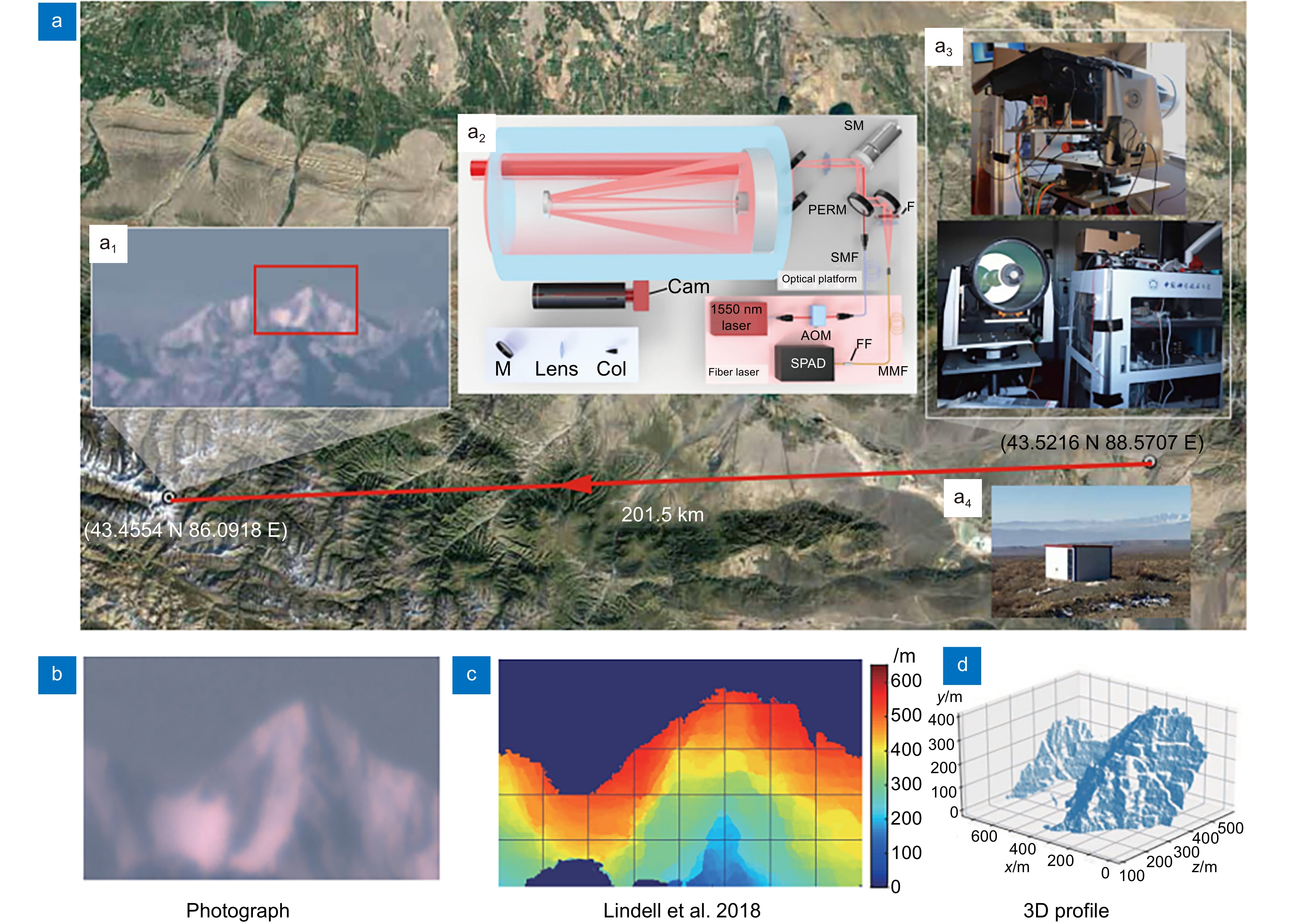
图 11 201.5 km远距离单光子探测成像系统及成像结果[11]。(a) 201.5 km 远距离单光子探测成像系统;(b) 目标图片;(c) Lindell所提算法效果;(d)三维重构轮廓
Figure 11. Imaging system and results of single photon for long-distance detection at 201.5 km[11]. (a) Imaging system for long-distance detection at 201.5 km; (b) Photograph of the target; (c) Results of the algorithm proposed by Lindell; (d) Reconstructed 3D profile
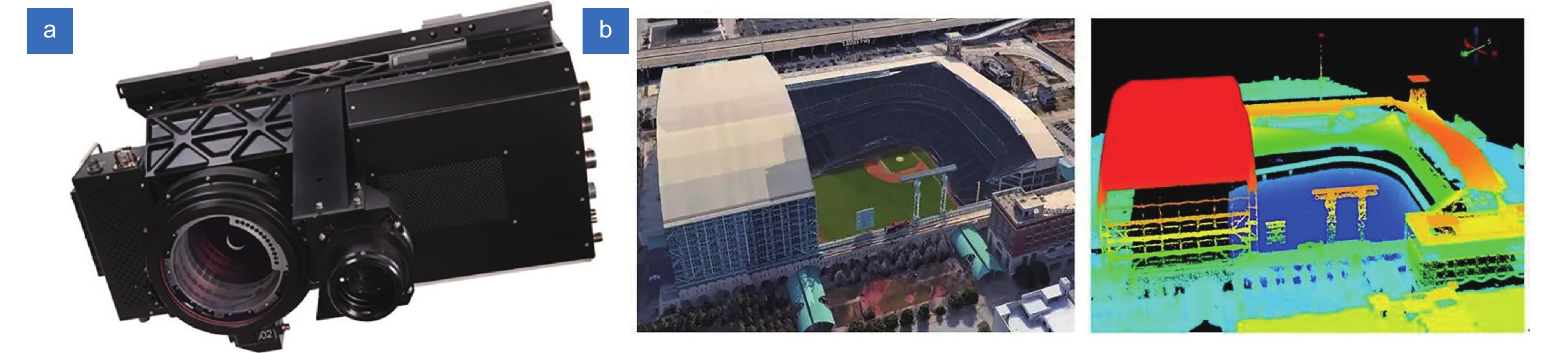
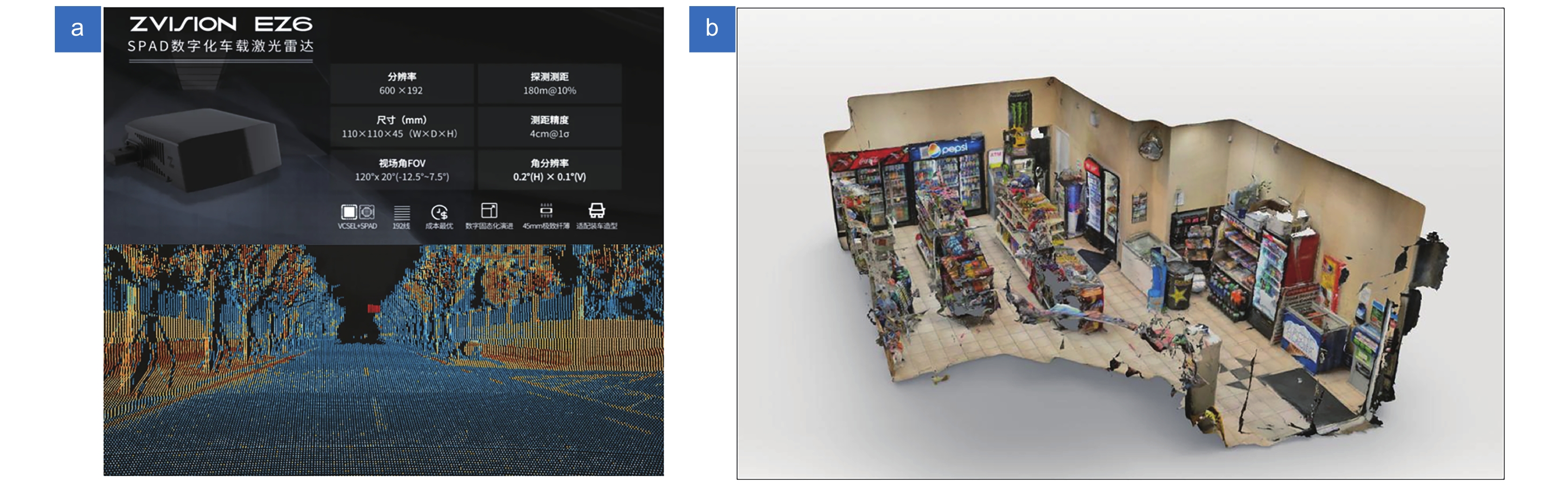
图 17 (a) ZVISION EZ6的性能参数及点云效果;(b) iPhone12 Pro三维成像效果图
Figure 17. (a) Performance metrics and imaging results of ZVISION EZ6; (b) The result of 3D imaging by iPhone 12 Pro
表 1 Si SPAD探测器的最新进展和重要参数
Table 1. Recent progress and important parameters of Si SPAD detectors
Reference Technology Year Size/μm Timing jitter/ps Dead time/ns AP/% DCR/cps Peak PDE [38] 65 nm standard CMOS 2018 20 7.8 100 <10 2800 8%@470 nm [39] 65 nm standard CMOS 2021 10 139 3.5 - 233 23.8@420 nm [40] 130 nm CIS 2019 23.78 127 - - 50 25%@465 nm [36] 180 nm CIS 2020 9.4 - - - 0.4 26.7%@520 nm [41] 180 nm CIS 2021 50 16 50 <3 0.23 55%@480 nm [42] 110 nm CIS 2023 10 68 - 0.15 12.6 73%@440 nm [43] 160 nm BCD 2021 10/20/30 75 0.9/1.9 0.14/0.09 0.19 64%@490 nm [44] 55 nm BCD 2021 8.8 52 0.97 0.97 0.1 62%@530 nm [45] 55 nm BCD 2023 14.4 55 2500 0 38.2 89.4%@450 nm  下载: 导出CSV
下载: 导出CSV
表 2 InGaAs/InP SPAD探测器的最新进展和重要参数
Table 2. Recent progress and important parameters of InGaAs/InP SPAD detectors
Reference Year Size/μm Timing Jitter
/psDead
time/nsAP/% DCR/cps Peak PDE [52] 2018 <100 - 2 <2 - 10%@1060 nm [50] 2020 - - 88 5.5 3k@253 K 40%@1550 nm [53] 2021 - 70 - 4.5 20k@225 K 50%@1550 nm [54] 2022 20 - - - 43.8k@247 K 55.4%@1550 nm [55] 2022 25 - - - 9.09k@223 K 25.72%@1550 nm [49] 2022 10 159 - - 1k@225 K 33%@1064 nm [56] 2023 - 44 20 1.4 - 21%@1550 nm
下载: 导出CSV
表 3 SPAD激光雷达在远距离探测的最新进展和重要参数
Table 3. Recent progress and important parameters of SPAD LiDAR in long-range detection
Reference Year System Distance
/kmWavelength/nm Power/mW Array Mode FOV/μrad PDE/% Aperture
/mm[74] 2013 Pulse accumulation 4.5 1550 <0.6 64 × 64 flash 3800 26 - [75] 2014 Random coding 1.77 1550 63800
(peak)- - - - 50 [69] 2017 Pulse accumulation 10.5 1550 10 - scan 28 ~30 210 [76] 2017 Pulse accumulation 2.5 532 3 100*1 scan 24750 ~36.8 95 [70] 2018 Pulse accumulation 21 1550 0.5 - scan 80 ~3.58 130 [71] 2020 Pulse accumulation 8.2 1550 120 128 × 128 scan 22.3 35 279 [73] 2020 Pulse accumulation 45 1550 120 1*1 scan 22.3 15 - [11] 2021 Pulse accumulation 201.5 1550 600 1*1 scan 11.2 19.3 280 [77] 2023 Pulse accumulation 13.8 1550 300 - scan - - -
下载: 导出CSV
表 4 部分公司单光子激光雷达产品
Table 4. Single-photon LiDAR products of partial companies
Company Year Product FOV Distance/m Power/W Frame Ouster 2020 ES2 26°(H) × 13°(V) 200 12~18 10~30 Ouster 2020 OS2 360°(H) × 22.5°(V) 200 18~24 20 南京芯视界 2020 VI4330 73°(H) × 58°(V) 15 - 30 IBEO 2021 Ibeonext 11.2°(H) × 5.6°(V) 140 - - Sense Photonics 2021 MultiRangeTM - 200 - - 亮道智能 2022 LDSatellite 120°(H) × 75°(V) 30 <10 10~25 速腾聚创 2022 RS-LiDAR-E1 120°(H) × 90°(V) 30 - 10~30 禾赛科技 2023 ET25 120°(H) × 25°(V) 250 12 10/20 SolidVue 2023 ES - 200 - - 一径科技 2023 ZVISION EZ6 120°(H) × 20°(V) 180 <15 - 华为 2023 - - 250 - 20 灵明光子 2023 ADS6311 ToF 120°(H) × 90°(V) 30 3 20
下载: 导出CSV
-
参考文献
[1] Andersson P. Long-range three-dimensional imaging using range-gated laser radar images[J]. Opt Eng, 2006, 45(3): 034301. doi: 10.1117/1.2183668
[2] 刘博, 于洋, 姜朔. 激光雷达探测及三维成像研究进展[J]. 光电工程, 2019, 46(7): 190167. doi: 10.12086/oee.2019.190167
Liu B, Yu Y, Jiang S. Review of advances in LiDAR detection and 3D imaging[J]. Opto-Electron Eng, 2019, 46(7): 190167. doi: 10.12086/oee.2019.190167
[3] 陈建光, 倪旭翔, 袁波, 等. SiPM激光雷达阳光下探测概率性能分析[J]. 光电工程, 2021, 48(10): 210196. doi: 10.12086/oee.2021.210196
Chen J G, Ni X X, Yuan B, et al. Analysis of detection probability performance of SiPM LiDAR under sunlight[J]. Opto-Electron Eng, 2021, 48(10): 210196. doi: 10.12086/oee.2021.210196
[4] Becker W. 高级时间相关单光子计数技术[M]. 屈军乐, 译. 北京: 科学出版社, 2009.
Becker W. Advanced time-correlated single photon counting techniques[M]. Qu J L, trans. Beijing: Science Press, 2009.
[5] Kirmani A, Venkatraman D, Shin D, et al. First-photon imaging[J]. Science, 2014, 343(6166): 58−61. doi: 10.1126/science.1246775
[6] O’Toole M, Lindell D B, Wetzstein G. Confocal non-line-of-sight imaging based on the light-cone transform[J]. Nature, 2018, 555(7696): 338−341. doi: 10.1038/nature25489
[7] Maccarone A, McCarthy A, Ren X M, et al. Underwater depth imaging using time-correlated single-photon counting[J]. Opt Express, 2015, 23(26): 33911−33926. doi: 10.1364/OE.23.033911
[8] Niclass C, Gersbach M, Henderson R, et al. A single photon avalanche diode implemented in 130-nm CMOS technology[J]. IEEE J Sel Top Quantum Electron, 2007, 13(4): 863−869. doi: 10.1109/JSTQE.2007.903854
[9] 张汉熠, 赵新宇, 张益成, 等. 单光子激光雷达研究进展[J]. 中国激光, 2022, 49(19): 1910003. doi: 10.3788/CJL202249.1910003
Zhang H Y, Zhao X Y, Zhang Y C, et al. Review of advances in single-photon LiDAR[J]. Chin J Lasers, 2022, 49(19): 1910003. doi: 10.3788/CJL202249.1910003
[10] Goodman J W. Statistical optics[M]. 2nd ed. Hoboken: John Wiley & Sons, Inc. , 2015.
[11] Li Z P, Ye J T, Huang X, et al. Single-photon imaging over 200 km[J]. Optica, 2021, 8(3): 344−349. doi: 10.1364/OPTICA.408657
[12] Marino R M, Spitzberg R M, Bohrer M J. A photon counting 3-D imaging laser radar for advanced discriminating interceptor seekers[C]//Annual Interceptor Technology Conference, 1993: 2644. https://doi.org/10.2514/6.1993-2644.
[13] Massa J S, Wallace A M, Buller G S, et al. Laser depth measurement based on time-correlated single-photon counting[J]. Opt Lett, 1997, 22(8): 543−545. doi: 10.1364/OL.22.000543
[14] McCarthy A, Collins R J, Krichel N J, et al. Long-range time-of-flight scanning sensor based on high-speed time-correlated single-photon counting[J]. Appl Opt, 2009, 48(32): 6241−6251. doi: 10.1364/AO.48.006241
[15] Shu R, Huang G H, Hou L B, et al. Multi-channel photon counting three-dimensional imaging laser radar system using fiber array coupled Geiger-mode avalanche photodiode[J]. Proc SPIE, 2012, 8542: 85420C. doi: 10.1117/12.974365
[16] Krichel N J, McCarthy A, Buller G S. Resolving range ambiguity in a photon counting depth imager operating at kilometer distances[J]. Opt Express, 2010, 18(9): 9192−9206. doi: 10.1364/OE.18.009192
[17] Hiskett P A, Parry C S, McCarthy A, et al. A photon-counting time-of-flight ranging technique developed for the avoidance of range ambiguity at gigahertz clock rates[J]. Opt Express, 2008, 16(18): 13685−13698. doi: 10.1364/OE.16.013685
[18] 刘博, 姜朔, 于洋, 等. 宏/子脉冲编码光子计数激光雷达[J]. 光电工程, 2020, 47(10): 200265. doi: 10.12086/oee.2020.200265
Liu B, Jiang S, Yu Y, et al. Macro/sub-pulse coded photon counting LiDAR[J]. Opto-Electron Eng, 2020, 47(10): 200265. doi: 10.12086/oee.2020.200265
[19] Hu Z H, Jiang C H, Zhu J G, et al. Chaos single photon LIDAR and the ranging performance analysis based on Monte Carlo simulation[J]. Opt Express, 2022, 30(23): 41658−41670. doi: 10.1364/OE.474228
[20] Hu Z H, Zhu J G, Jiang C H, et al. Improving the ranging performance of chaos LiDAR[J]. Appl Opt, 2023, 62(14): 3598−3605. doi: 10.1364/AO.487503
[21] Hu Z H, Jiang C H, Zhu J G, et al. Efficient and robust chaos single photon LiDAR[J]. Opt Laser Technol, 2024, 174: 110623. doi: 10.1016/j.optlastec.2024.110623
[22] Luu J X, Jiang L A. Coherent photon counting ladar[C]//Optical Amplifiers and Their Applications/Coherent Optical Technologies and Applications, 2006: CWB5. https://doi.org/10.1364/COTA.2006.CWB5.
[23] Redman B C, Stann B L. Photon counting chirped amplitude modulation ladar[R]. Affiliation: Army Research Laboratory, 2008.
[24] 陈效双, 何家乐, 李庆, 等. 中红外波段雪崩光子探测器研究进展[J]. 红外技术, 2018, 40(9): 825−836.
Chen X S, He J L, Li Q, et al. Research progress of mid-infrared avalanche photodiode detectors[J]. Infrared Technol, 2018, 40(9): 825−836.
[25] 尤立星. 超导纳米线单光子探测现状与展望[J]. 红外与激光工程, 2018, 47(12): 1202001. doi: 10.3788/IRLA201847.1202001
You L X. Status and prospect of superconducting nanowire single photon detection[J]. Infrared Laser Eng, 2018, 47(12): 1202001. doi: 10.3788/IRLA201847.1202001
[26] 霍晓培, 杨德振, 喻松林, 等. 单光子探测器研究现状与发展[J]. 激光与红外, 2023, 53(1): 3−11. doi: 10.3969/j.issn.1001-5078.2023.01.001
Huo X P, Yang D Z, Yu S L, et al. Research on status and development of single photon detector[J]. Laser Infrared, 2023, 53(1): 3−11. doi: 10.3969/j.issn.1001-5078.2023.01.001
[27] 程碑彤, 代千, 谢修敏, 等. 单光子探测器的研究进展[J]. 激光技术, 2022, 46(5): 601−609. doi: 10.7510/jgjs.issn.1001-3806.2022.05.004
Cheng B T, Dai Q, Xie X M, et al. Research progress of single-photon detectors[J]. Laser Technol, 2022, 46(5): 601−609. doi: 10.7510/jgjs.issn.1001-3806.2022.05.004
[28] Veerappan C, Charbon E. A substrate isolated CMOS SPAD enabling wide spectral response and low electrical crosstalk[J]. IEEE J Sel Top Quantum Electron, 2014, 20(6): 299−305. doi: 10.1109/JSTQE.2014.2318436
[29] Shin D, Park B, Chae Y, et al. The effect of a deep virtual guard ring on the device characteristics of silicon single photon avalanche diodes[J]. IEEE Trans Electron Devices, 2019, 66(7): 2986−2991. doi: 10.1109/TED.2019.2913714
[30] Lee M J, Ximenes A R, Padmanabhan P, et al. High-performance back-illuminated three-dimensional stacked single-photon avalanche diode implemented in 45-nm CMOS technology[J]. IEEE J Sel Top Quantum Electron, 2018, 24(6): 3801809. doi: 10.1109/JSTQE.2018.2827669
[31] Vines P, Kuzmenko K, Kirdoda J, et al. High performance planar germanium-on-silicon single-photon avalanche diode detectors[J]. Nat Commun, 2019, 10: 1086. doi: 10.1038/s41467-019-08830-w
[32] Bai P, Zhang Y H, Shen W Z. Infrared single photon detector based on optical up-converter at 1550 nm[J]. Sci Rep, 2017, 7: 15341. doi: 10.1038/s41598-017-15613-0
[33] 胡志宏. 基于随机编码的单光子探测关键技术研究[D]. 北京: 中国科学院微电子研究所, 2023.
Hu Z H. Research on key technologies of single-photon detection based on random coding[D]. Beijng: Institute of Microelectronics of the Chinese Academy of Sciences, 2023.
[34] Acerbi F, Gundacker S. Understanding and simulating SiPMs[J]. Nucl Instrum Methods Phys Res A Accel Spectrom Detect Assoc Equip, 2019, 926: 16−35. doi: 10.1016/j.nima.2018.11.118
[35] Song H Z. Avalanche photodiode focal plane arrays and their application to laser detection and ranging[M]//Chee K. Advances in Photodetectors-Research and Applications. London: IntechOpen, 2018. https://doi.org/10.5772/intechopen.81294.
[36] Morimoto K, Ardelean A, Wu M L, et al. Megapixel time-gated SPAD image sensor for 2D and 3D imaging applications[J]. Optica, 2020, 7(4): 346−354. doi: 10.1364/OPTICA.386574
[37] Morimoto K, Iwata J, Shinohara M, et al. 3.2 Megapixel 3D-stacked charge focusing SPAD for low-light imaging and depth sensing[C]//2021 IEEE International Electron Devices Meeting (IEDM), 2021: 20.2. 1–20.2. 4. https://doi.org/10.1109/IEDM19574.2021.9720605.
[38] Nolet F, Parent S, Roy N, et al. Quenching circuit and SPAD integrated in CMOS 65 nm with 7.8 ps FWHM single photon timing resolution[J]. Instruments, 2018, 2(4): 19. doi: 10.3390/instruments2040019
[39] Jiang W, Scott R, Deen M J. High-speed active quench and reset circuit for SPAD in a standard 65 nm CMOS technology[J]. IEEE Photonics Technol Lett, 2021, 33(24): 1431−1434. doi: 10.1109/LPT.2021.3124989
[40] Erdogan A T, Walker R, Finlayson N, et al. A CMOS SPAD line sensor with per-pixel histogramming TDC for time-resolved multispectral imaging[J]. IEEE J Solid-State Circuits, 2019, 54(6): 1705−1719. doi: 10.1109/JSSC.2019.2894355
[41] Gramuglia F, Wu M L, Bruschini C, et al. A low-noise CMOS SPAD pixel with 12.1 ps SPTR and 3 Ns dead time[J]. IEEE J Sel Top Quantum Electron, 2022, 28(2: Optical Detectors): 3800809. https://doi.org/10.1109/JSTQE.2021.3088216.
[42] Lee M J, Karaca U, Kizilkan E, et al. A 73% peak PDP single-photon avalanche diode implemented in 110 nm CIS technology with doping compensation[J]. IEEE J Sel Top Quantum Electron, 2024, 30(1: Single-Photon Technologies and Applications): 3800310. https://doi.org/10.1109/JSTQE.2023.3288674.
[43] Severini F, Cusini I, Berretta D, et al. SPAD pixel with sub-ns dead-time for high-count rate applications[J]. IEEE J Sel Top Quantum Electron, 2022, 28(2: Optical Detectors): 3802808. https://doi.org/10.1109/JSTQE.2021.3124825.
[44] Gramuglia F, Keshavarzian P, Kizilkan E, et al. Engineering breakdown probability profile for PDP and DCR optimization in a SPAD fabricated in a standard 55 nm BCD process[J]. IEEE J Sel Top Quantum Electron, 2022, 28(2: Optical Detectors): 3802410. https://doi.org/10.1109/JSTQE.2021.3114346.
[45] Ha W Y, Park E, Eom D, et al. SPAD developed in 55 nm bipolar-CMOS-DMOS technology achieving near 90% peak PDP[J]. IEEE J Sel Top Quantum Electron, 2024, 30(1: Single-Photon Technologies and Applications): 3800410. https://doi.org/10.1109/JSTQE.2023.3303678.
[46] 史衍丽, 李云雪, 白容, 等. 短波红外单光子探测器的发展(特邀)[J]. 红外与激光工程, 2023, 52(3): 20220908. doi: 10.3788/IRLA20220908
Shi Y L, Li Y X, Bai R, et al. Advancement of shortwave infrared single-photon detectors (invited)[J]. Infrared Laser Eng, 2023, 52(3): 20220908. doi: 10.3788/IRLA20220908
[47] Meng X, Tan C H, Dimler S, et al. 1550 nm InGaAs/InAlAs single photon avalanche diode at room temperature[J]. Opt Express, 2014, 22(19): 22608−22615. doi: 10.1364/OE.22.022608
[48] Seo H S, Park S H, Kwak S, et al. A model for the InGaAs/InP single photon avalanche diodes with multiple-quantum wells in the charge multiplication region[J]. J Korean Phys Soc, 2018, 72(2): 289−293. doi: 10.3938/jkps.72.289
[49] Signorelli F, Telesca F, Conca E, et al. Low-noise InGaAs/InP single-photon avalanche diodes for fiber-based and free-space applications[J]. IEEE J Sel Top Quantum Electron, 2022, 28(2: Optical Detectors): 3801310. https://doi.org/10.1109/JSTQE.2021.3104962.
[50] Fang Y Q, Chen W, Ao T H, et al. InGaAs/InP single-photon detectors with 60% detection efficiency at 1550 nm[J]. Rev Sci Instrum, 2020, 91(8): 083102. doi: 10.1063/5.0014123
[51] 崔大健, 敖天宏, 奚水清, 等. InGaAs单光子雪崩焦平面研究进展(特邀)[J]. 红外与激光工程, 2023, 52(3): 20230016. doi: 10.3788/IRLA20230016
Cui D J, Ao T H, Xi S Q, et al. Research progress of InGaAs single-photon avalanche focal plane (invited)[J]. Infrared Laser Eng, 2023, 52(3): 20230016. doi: 10.3788/IRLA20230016
[52] Diagne M, McIntosh A, Donnelly J, et al. Advances in InP/InGaAs Geiger-mode APD focal plane arrays (Conference Presentation)[J]. Proc SPIE, 2018, 10659: 1065904. doi: 10.1117/12.2306423
[53] Signorelli F, Telesca F, Conca E, et al. InGaAs/InP SPAD detecting single photons at 1550 nm with up to 50% efficiency and low noise[C]//2021 IEEE International Electron Devices Meeting (IEDM), 2021: 20.3. 1–20.3. 4. https://doi.org/10.1109/IEDM19574.2021.9720559.
[54] He T T, Yang X H, Tang Y S, et al. High photon detection efficiency InGaAs/InP single photon avalanche diode at 250 K[J]. J Semicond, 2022, 43(10): 102301. doi: 10.1088/1674-4926/43/10/102301
[55] Wang S, Ye H, Geng L Y, et al. Design, fabrication, and characteristic analysis of 64×64 InGaAs/InP single-photon avalanche diode array[J]. J Electron Mater, 2022, 51(5): 2692−2697. doi: 10.1007/s11664-022-09531-9
[56] He D Y, Wang S, Chen J L, et al. 2.5 GHz gated InGaAs/InP single-photon avalanche diode with 44 ps time jitter[J]. Adv Devices Instrum, 2023, 4: 0020. doi: 10.34133/adi.0020
[57] Brown R, Hartzell P, Glennie C. Evaluation of SPL100 single photon lidar data[J]. Remote Sens, 2020, 12(4): 722. doi: 10.3390/rs12040722
[58] Shin D, Xu F H, Venkatraman D, et al. Photon-efficient imaging with a single-photon camera[J]. Nat Commun, 2016, 7: 12046. doi: 10.1038/ncomms12046
[59] Rapp J, Goyal V K. A few photons among many: unmixing signal and noise for photon-efficient active imaging[J]. IEEE Trans Comput Imaging, 2017, 3(3): 445−459. doi: 10.1109/TCI.2017.2706028
[60] Chen S M, Halimi A, Ren X M, et al. Learning non-local spatial correlations to restore sparse 3D single-photon data[J]. IEEE Trans Image Process, 2020, 29: 3119−3131. doi: 10.1109/TIP.2019.2957918
[61] Huang X, Hong Y, Li Z P, et al. Frequency-modulated continuous-wave 3D imaging with high photon efficiency[J]. Opt Lett, 2022, 47(14): 3568−3571. doi: 10.1364/OL.463007
[62] Lee J, Ingle A, Chacko J V, et al. CASPI: collaborative photon processing for active single-photon imaging[J]. Nat Commun, 2023, 14(1): 3158. doi: 10.1038/s41467-023-38893-9
[63] Ronneberger O, Fischer P, Brox T. U-Net: convolutional networks for biomedical image segmentation[C]//18th International Conference on Medical Image Computing and Computer-Assisted Intervention, 2015: 234–241. https://doi.org/10.1007/978-3-319-24574-4_28.
[64] Lindell D B, O'Toole M, Wetzstein G. Single-photon 3D imaging with deep sensor fusion[J]. ACM Trans Graph, 2018, 37(4): 113. doi: 10.1145/3197517.3201316
[65] Zhao X C, Jiang X D, Han A J, et al. Photon-efficient 3D reconstruction employing a edge enhancement method[J]. Opt Express, 2022, 30(2): 1555−1569. doi: 10.1364/OE.446369
[66] Peng J Y, Xiong Z W, Huang X, et al. Photon-efficient 3D imaging with a non-local neural network[C]//16th European Conference Computer Vision, 2020: 225–241. https://doi.org/10.1007/978-3-030-58539-6_14.
[67] Yang X, Tong ZY, Jiang P F, et al. Deep-learning based photon-efficient 3D and reflectivity imaging with a 64×64 single-photon avalanche detector array[J]. Opt Express, 2022, 30(18): 32948−32964. doi: 10.1364/OE.465918
[68] 方照勋, 张华, 刘鹏鹏, 等. 基于盖革模式APD的啁啾调幅激光雷达分析[J]. 激光与红外, 2012, 42(6): 620−625. doi: 10.3969/j.issn.1001-5078.2012.06.005
Fang Z X, Zhang H, Liu P P, et al. Analysis of chirped AM ladar based on Geiger-mode APD[J]. Laser Infrared, 2012, 42(6): 620−625. doi: 10.3969/j.issn.1001-5078.2012.06.005
[69] Pawlikowska A M, Halimi A, Lamb R A, et al. Single-photon three-dimensional imaging at up to 10 kilometers range[J]. Opt Express, 2017, 25(10): 11919−11931. doi: 10.1364/OE.25.011919
[70] Du B C, Pang C K, Wu D, et al. High-speed photon-counting laser ranging for broad range of distances[J]. Sci Rep, 2018, 8(1): 4198. doi: 10.1038/s41598-018-22675-1
[71] Li Z P, Huang X, Jiang P Y, et al. Super-resolution single-photon imaging at 8.2 kilometers[J]. Opt Express, 2020, 28(3): 4076−4087. doi: 10.1364/OE.383456
[72] 黄远建, 李晓银, 叶文怡, 等. 基于共聚焦亚像素扫描的高分辨三维成像[J]. 光学学报, 2023, 43(8): 0822014. doi: 10.3788/AOS221974
Huang Y J, Li X Y, Ye W Y, et al. High resolution 3D imaging based on confocal sub-pixel scanning[J]. Acta Opt Sin, 2023, 43(8): 0822014. doi: 10.3788/AOS221974
[73] Li Z P, Huang X, Cao Y, et al. Single-photon computational 3D imaging at 45 km[J]. Photonics Res, 2020, 8(9): 1532−1540. doi: 10.1364/PRJ.390091
[74] McCarthy A, Ren X M, Della Frera A, et al. Kilometer-range depth imaging at 1550 nm wavelength using an InGaAs/InP single-photon avalanche diode detector[J]. Opt Express, 2013, 21(19): 22098−22113. doi: 10.1364/OE.21.022098
[75] Yang F, Zhang X, He Y, et al. High speed pseudorandom modulation fiber laser ranging system[J]. Chin Opt Lett, 2014, 12(8): 082801. doi: 10.3788/COL201412.082801
[76] Li Z H, Wu E, Pang C K, et al. Multi-beam single-photon-counting three-dimensional imaging lidar[J]. Opt Express, 2017, 25(9): 10189−10195. doi: 10.1364/OE.25.010189
[77] Dai C, Ye W L, Yu C, et al. Long-range photon-efficient 3D imaging without range ambiguity[J]. Opt Lett, 2023, 48(6): 1542−1545. doi: 10.1364/OL.485127
[78] Maccarone A, Della Rocca F M, McCarthy A, et al. Three-dimensional imaging of stationary and moving targets in turbid underwater environments using a single-photon detector array[J]. Opt Express, 2019, 27(20): 28437−28456. doi: 10.1364/OE.27.028437
[79] Hua K J, Liu B, Fang L, et al. Correction of range walk error for underwater photon-counting imaging[J]. Opt Express, 2020, 28(24): 36260−36273. doi: 10.1364/OE.404539
[80] Maccarone A, Drummond K, McCarthy A, et al. Submerged single-photon LiDAR imaging sensor used for real-time 3D scene reconstruction in scattering underwater environments[J]. Opt Express, 2023, 31(10): 16690−16708. doi: 10.1364/OE.487129
[81] Tobin R, Halimi A, McCarthy A, et al. Three-dimensional single-photon imaging through obscurants[J]. Opt Express, 2019, 27(4): 4590−4611. doi: 10.1364/OE.27.004590
[82] Shi H T, Shen G Y, Qi H Y, et al. Noise-tolerant Bessel-beam single-photon imaging in fog[J]. Opt Express, 2022, 30(7): 12061−12068. doi: 10.1364/OE.454669
[83] Qi H Y, Shen G Y, Li Z H, et al. Noise-tolerant single-photon imaging by using non-diffractive pulsed laser beams[J]. Opt Commun, 2023, 527: 128978. doi: 10.1016/j.optcom.2022.128978
[84] Jiang P Y, Li Z P, Ye W L, et al. Long range 3D imaging through atmospheric obscurants using array-based single-photon LiDAR[J]. Opt Express, 2023, 31(10): 16054−16066. doi: 10.1364/OE.487560
[85] Shen S S, Chen Q, He W J, et al. Approach for Pseudo-random bit-stream multi-depth imaging[J]. Opt Quantum Electron, 2020, 52(2): 76. doi: 10.1007/s11082-019-2135-y
[86] Halimi A, Tobin R, McCarthy A, et al. Restoration of multilayered single-photon 3D lidar images[C]//2017 25th European Signal Processing Conference (EUSIPCO), 2017: 708–712. https://doi.org/10.23919/EUSIPCO.2017.8081299.
[87] 赵浴阳. 基于单光子激光雷达的嵌入式实时处理系统设计与实现[D]. 北京: 中国科学院微电子研究所, 2023.
Zhao Y Y. Design and implementation of embedded real-time processing system based on single-photon LiDAR[D]. Beijng: Institute of Microelectronics of the Chinese Academy of Sciences, 2023.
[88] 李雨佳, 周晓青, 李国元, 等. 星载单光子激光雷达浅水测深技术研究进展和展望[J]. 红外与激光工程, 2022, 51(10): 20220003. doi: 10.3788/IRLA20220003
Li Y J, Zhou X Q, Li G Y, et al. Progress and prospect of space-borne photon-counting lidar shallow water bathymetry technology[J]. Infrared Laser Eng, 2022, 51(10): 20220003. doi: 10.3788/IRLA20220003
[89] Markus T, Neumann T, Martino A, et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): science requirements, concept, and implementation[J]. Remote Sens Environ, 2017, 190: 260−273. doi: 10.1016/j.rse.2016.12.029
[90] Yu A W, Krainak M A, Harding D J, et al. Sixteen channel, non-scanning airborne lidar surface topography (list) simulator[C]//2011 IEEE International Geoscience and Remote Sensing Symposium, 2011: 4119–4121. https://doi.org/10.1109/IGARSS.2011.6050139.
[91] Shi Y F, Li Z H, Feng B C, et al. Enhanced solar-blind ultraviolet single-photon detection with a Geiger-mode silicon avalanche photodiode[J]. Chin Opt Lett, 2016, 14(3): 030401. doi: 10.3788/COL201614.030401
[92] Degnan J J, McGarry J F, Zagwodzki T W, et al. Design and performance of a 3D imaging photon-counting microlaser altimeter operating from aircraft cruise altitudes under day or night conditions[J]. Proc SPIE, 2002, 4546: 1−10. doi: 10.1117/12.453978
[93] Marino R M, Davis W R, Jr. Jigsaw: a foliage-penetrating 3D imaging laser radar system[J]. Lincoln Lab J, 2005, 15(1): 23−36.
[94] Knowlton R. Airborne ladar imaging research testbed[R]. Lexington: MIT Lincoln Laboratory, 2011.
[95] Li Q H, Degnan J, Barrett T, et al. First evaluation on single photon-sensitive lidar data[J]. Photogramm Eng Remote Sens, 2016, 82(7): 455−463. doi: 10.14358/PERS.82.7.455
[96] 胡国军, 朱精果, 刘汝卿. Mars-LiDAR系统误差分析及安置角误差飞行检校[J]. 红外与激光工程, 2016, 45(12): 1217009. doi: 10.3788/IRLA201645.1217009
Hu G J, Zhu J G, Liu R Q. Error analysis of Mars-LiDAR system and calibration of installation angle error[J]. Infrared Laser Eng, 2016, 45(12): 1217009. doi: 10.3788/IRLA201645.1217009
[97] Yu C, Qiu J W, Xia H Y, et al. Compact and lightweight 1.5 μm lidar with a multi-mode fiber coupling free-running InGaAs/InP single-photon detector[J]. Rev Sci Instrum, 2018, 89(10): 103106. doi: 10.1063/1.5047472
[98] Xie S Y, Zhang S Y, Tan C H. InGaAs/InAlAs avalanche photodiode with low dark current for high-speed operation[J]. IEEE Photonics Technol Lett, 2015, 27(16): 1745−1748. doi: 10.1109/LPT.2015.2439153
[99] 张秀川, 蒋利群, 高新江, 等. InGaAs/InP盖革模式雪崩焦平面阵列的研制[J]. 半导体光电, 2015, 36(3): 356−360,391. doi: 10.16818/j.issn1001-5868.2015.03.003
Zhang X C, Jiang L Q, Gao X J, et al. Fabrication of InGaAs/InP Geiger-mode avalanche focal plane arrays[J]. Semicond Optoelectron, 2015, 36(3): 356−360,391. doi: 10.16818/j.issn1001-5868.2015.03.003
[100] Osrečki Ž, Knežević T, Nanver L K, et al. Indirect optical crosstalk reduction by highly-doped backside layer in single-photon avalanche diode arrays[J]. Opt Quantum Electron, 2018, 50(3): 152. doi: 10.1007/s11082-018-1415-2
[101] Zhao X C, Wu M, Zhang Y, et al. Robust single-photon 3D imaging based on full-scale feature integration and intensity edge guidance[J]. Opt Lasers Eng, 2024, 172: 107850. doi: 10.1016/j.optlaseng.2023.107850
[102] Lindner S, Zhang C, Antolovic I M, et al. A 252×144 SPAD pixel FLASH LiDAR with 1728 dual-clock 48.8 ps TDCs, integrated histogramming and 14.9-to-1 compression in 180nm CMOS technology[C]//2018 IEEE Symposium on VLSI Circuits, 2018: 69–70. https://doi.org/10.1109/VLSIC.2018.8502386.
[103] Yang X, Yao C H, Kang L, et al. A bio-inspired spiking vision chip based on SPAD imaging and direct spike computing for versatile edge vision[J]. IEEE J Solid-State Circuits, 2023. https://doi.org/10.1109/JSSC.2023.3340018.
[104] Mora-Martín G, Turpin A, Ruget A, et al. High-speed object detection with a single-photon time-of-flight image sensor[J]. Opt Express, 2021, 29(21): 33184−33196. doi: 10.1364/OE.435619
[105] Kwok R, Cunningham G F, Zwally H J, et al. Ice, Cloud, and land Elevation Satellite (ICESat) over Arctic sea ice: retrieval of freeboard[J]. J Geophys Res Oceans, 2007, 112(C12): C12013. doi: 10.1029/2006JC003978
[106] Li Y, Peng J Y, Ye J T, et al. NLOST: non-line-of-sight imaging with transformer[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 13313–13322. https://doi.org/10.1109/CVPR52729.2023.01279.
-
访问统计

 点击扫一扫
点击扫一扫
图(18)
表(4)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


