
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要
激光雷达是一种可以精确、快速获取目标三维空间信息的主动探测技术,在目标的识别、分类和高精度三维成像及测量方面有着独特的技术优势,应用范围和发展前景十分广阔。本文详细阐述了激光雷达探测以及三维成像系统的各种体制、探测原理等;总结和梳理了国内外单点扫描、线阵推扫以及面阵三维成像激光雷达系统的发展现状;同时对比分析了它们在星载、机载、车载等不同平台和应用领域的技术特点及优劣势等。近年来,三维成像激光雷达逐渐从单点扫描向小面阵扫描和线阵推扫式及面阵闪光成像发展,成像速度越来越快;同时单光子探测技术逐渐成熟,探测灵敏度越来越高。随着现代探测技术越来越趋向于多种传感器的融合探测发展,三维成像的发展也趋向于主、被动成像相结合,以获取更丰富的目标信息。
Abstract
LiDAR is a kind of active detection technology, which can acquire the three-dimensional spatial information of the target accurately and quickly. Due to its unique technical advantages in object recognition, classification, high-precision 3D imaging and measurement, the application scope and development prospect of LiDAR are quite broad. In this article, the principles of various LiDAR detection and 3D imaging systems are introduced, and the foreign and domestic development status of single point scanning, linear array sweeping and planar array 3D imaging LiDAR systems are summarized and sorted out. Meanwhile, their technical characteristics, advantages and disadvantages in different platforms and application fields such as spaceborne, airborne and vehicular platforms are compared and analyzed. Recently, 3D imaging LiDAR is gradually developed from single point scanning to small array scanning, line array sweep and array flash imaging. At the same time, the single photon detection technology is becoming mature and the detection sensitivity is getting higher and higher. With the development of modern detection technology more and more inclined to the fusion detection of various sensors, the development of 3D imaging is also inclined to the combination of active and passive imaging to obtain more abundant target information.
-
Overview

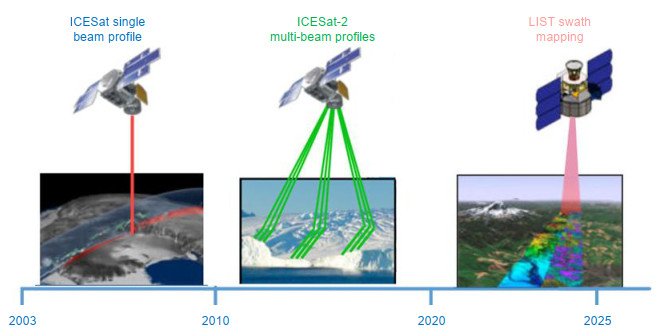
Overview: LiDAR is a kind of active detection technology, which can acquire the three-dimensional spatial information of the target accurately and quickly. As an active imaging system, three-dimensional imaging LiDAR has the advantages of obtaining high-precision distance dimension information and not being restricted by light conditions compared with passive imaging systems, and compared with the microwave radar imaging system, it has the advantages of high angular resolution, high measurement accuracy, strong anti-interference ability and easy miniaturization. Due to its unique technical advantages in object recognition, classification, high-precision 3D imaging and measurement, it is widely used in military, aerospace and civil 3D sensing and other fields. With the development of laser and detector, various range measurement techniques and 3D imaging LiDAR systems are flourishing, and the application scope and development prospect of LiDAR are quite broad. Recently, 3D imaging LiDAR systems are gradually developed from single point scanning to small array scanning, line array sweep and planar array flash imaging. At the same time, the single photon detection technology is becoming mature and the detection sensitivity of 3D imaging LiDAR is getting higher and higher. With the development of modern detection technology more and more inclined to the fusion detection of various sensors, the development of 3D imaging is also inclined to the combination of active and passive imaging to obtain more abundant target information.
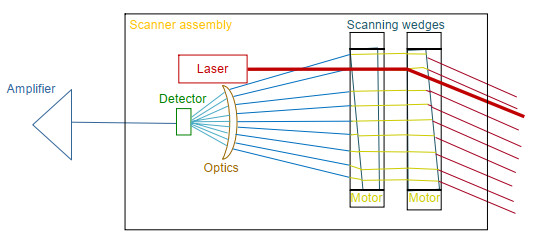
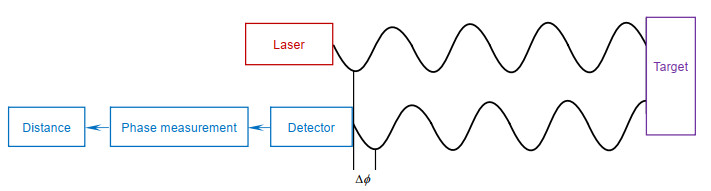
According to the imaging mechanism, the 3D imaging LiDAR systems can be divided into scanning imaging LiDAR system and planar array LiDAR imaging system. According to the laser distance measurement mechanism, it can be divided into direct pulse ranging, phase ranging and linear frequency modulation ranging. Different mechanisms of LiDAR 3D imaging system have different advantages and disadvantages. In this article, the principles of various LiDAR detection and 3D imaging systems are introduced, and the foreign and domestic development status of single point scanning, linear array sweeping and planar array 3D imaging LiDAR systems are summarized and sorted out. Meanwhile, their technical characteristics, advantages and disadvantages in different platforms and application fields such as spaceborne, airborne and vehicular platforms are compared and analyzed. In addition, it should also be recognized that 3D imaging LiDAR as a means of detection also has its shortcomings. For example, compared with passive camera imaging systems, its horizontal resolution is not high and it lacks target texture information, compared with the microwave radar, it is more susceptible to atmospheric conditions such as cloud, fog and haze. In the design and application of LiDAR systems, one should give full consideration to the actual need, try to avoid its weakness and take its advantages. It will be a good choice for combining LiDAR with visible/infrared passive imaging cameras and only taking the point of interest/controlling for fast and accurate ranging, which can make full use of their respective advantages. Hoping this article can provide some reference for readers to understand the development and design of modern 3D imaging LiDAR systems.
-

-

-
参考文献
[1] McManamon P F.Review of ladar:a historic, yet emerging, sensor technology with rich phenomenology[J].Optical Engineering, 2012, 51(6):060901. doi: 10.1117/1.OE.51.6.060901
[2] Stone W C, Juberts M, Dagalakis N G, et al.Performance analysis of next-generation LADAR for manufacturing, construction, and mobility[R].NISTIR 7117, 2004.
[3] Richmond D R, Stephen C C.Direct-Detection LADAR Systems[M].USA:SPIE Press, 2010.
[4] Gatt P, Johnson S, Nichols T.Geiger-mode avalanche photodiode ladar receiver performance characteristics and detection statistics[J].Applied Optics, 2009, 48(17):3261-3276. doi: 10.1364/AO.48.003261
[5] Whyte R, Streeter L, Cree M J, et al.Application of lidar techniques to time-of-flight range imaging[J].Applied Optics, 2015, 54(33):9654-9664. doi: 10.1364/AO.54.009654
[6] Jang J, Hwang S, Park K.Unambiguous range extension of a phase-shift based lidar by using two laser diodes with different modulation frequencies[C]//Proceedings of SPIE-International Conference on Optics in Precision Engineering and Nanotechnology, Singapore, 2013.
[7] 范圆圆.基于双频调制信号的相位法距离测量研究[D].太原: 中北大学, 2014.
Fan Y Y.Study of phase distance measurement based on dual-frequency modulated signals[D].Taiyuan: North University of China, 2014.
[8] Pierrottet D F, Amzajerdian F, Petway L B, et al.Linear FMCW laser radar for precision range and vector velocity measurements[J].MRS Proceedings, 2008, 1076:1076-K04-06. doi: 10.1557/PROC-1076-K04-06
[9] Gao S, Hui R.Frequency-modulated continuous-wave lidar using I/Q modulator for simplified heterodyne detection[J].Optics Letters, 2012, 37(11):2022-2024. doi: 10.1364/OL.37.002022
[10] Nobili S, Dominguez S, Garcia G, et al.16 channels Velodyne versus planar LiDARs based perception system for Large Scale 2D-SLAM[C]//7th Workshop on Planning, Perception and Navigation for Intelligent Vehicles, Hamburg, Germany, 2015: 131-136.
[11] Degnan J J.A conceptual design for a spaceborne 3D imaging lidar[J].e & i Elektrotechnik und Informationstechnik, 2002, 119(4):99-106. doi: 10.1007/BF03161616
[12] Marino R M, Stephens T, Hatch R E, et al.A compact 3D imaging laser radar system using Geiger-mode APD arrays: system and measurements[C]//Laser Radar Technology and Applications VIII, Orlando, Florida, United States, 2003, 5086: 1-16.
[13] Hegna T, Pettersson H, Grujic K.Inexpensive 3-D laser scanner system based on a galvanometer scan head[C]//International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, UK, 2010.
[14] 王建宇, 洪光烈, 卜弘毅, 等.机载扫描激光雷达的研制[J].光学学报, 2009, 29(9):2584-2589. http://d.old.wanfangdata.com.cn/Periodical/gxxb200909044
Wang J Y, Hong G L, Bu H Y, et al.Study on airborne scanning ladar[J].Acta Optica Sinica, 2009, 29(9):2584-2589. http://d.old.wanfangdata.com.cn/Periodical/gxxb200909044
[15] 纪荣袆, 赵长明, 陈国.激光扫描转镜扫描轨迹的分析计算[J].中国激光, 2011, 38(4):1-5. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201104037
Ji R W, Zhao C M, Chen G.Analysis and calculation of scan trace of laser scanning rotation mirror[J].Chinese Journal of Lasers, 2011, 38(4):1-5. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201104037
[16] Do Carmo J P.Imaging LIDAR technology developments at the European Space Agency[C]//International Conference on Applications of Optics and Photonics, Braga, Portugal, 2011, 8001: 800129.
[17] Roth M W, Hunnell J C, Murphy K E, et al.High-resolution foliage penetration with gimbaled lidar[C]//Laser Radar Technology and Applications XII, Orlando, Florida, United States, 2007, 6550: 65500K.
[18] Riegl.Industrial 2D laser Scanner LMS-Q120ii[Z].Riegl, 2009.
[19] 贺嘉.激光雷达高速扫描系统原理及设计[D].西安: 西安电子科技大学, 2009.
He J.Theory of high speed of scanning system of bistatic lidar and design[D].Xi'an: Xidian University, 2009.
[20] Kim J D, Jung J K, Jeon B C, et al.Wide band laser heat treatment using pyramid polygon mirror[J].Optics and Lasers in Engineering, 2001, 35(5):285-297. doi: 10.1016/S0143-8166(01)00018-5
[21] Stevenson G, Verdun H R, Stern P H, et al.Testing the helicopter obstacle avoidance system[C]//SPIE's 1995 Symposium on OE/Aerospace Sensing and Dual Use Photonics.International Society for Optics and Photonics, Orlando, FL, United States, 1995: 93-103.
[22] Hofmann U, Senger F, Soerensen F, et al.Biaxial resonant 7mm-MEMS mirror for automotive LIDAR application[C]//2012 International Conference on Optical MEMS & Nanophotonics, Banff, AB, Canada, 2012: 150-151.
[23] Niclass C, Ito K, Soga M, et al.Design and characterization of a 256×64-pixel single-photon imager in CMOS for a MEMS-based laser scanning time-of-flight sensor[J].Optics Express, 2012, 20(11):11863-11881. doi: 10.1364/OE.20.011863
[24] Lee X, Wang C H.Optical design for uniform scanning in MEMS-based 3D imaging lidar[J].Applied Optics, 2015, 54(9):2219-2223. doi: 10.1364/AO.54.002219
[25] 余莹洁.车载激光雷达的主要技术分支及发展趋势[J].科研信息化技术与应用, 2018, 9(6):18-24. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kyxxhjsyyy201806003
Yu J Y.The main technical branches and development trend of vehicle LiDAR[J].E-science Technology & Application, 2018, 9(6):18-24. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kyxxhjsyyy201806003
[26] 颜跃武, 安俊明, 张家顺, 等.光学相控阵技术研究进展[J].激光与光电子学进展, 2018, 55:020006. http://d.old.wanfangdata.com.cn/Periodical/zgjg200812001
Yan Y W, An J M, Zhang J S, et al.Research progress of optical phased array technology[J].Laser & Optoelectronics Progress, 2018, 55:020006. http://d.old.wanfangdata.com.cn/Periodical/zgjg200812001
[27] Nimelman M, Tripp J, Bailak G, et al.Spaceborne scanning lidar system (SSLS)[C]//Spaceborne Sensors Ⅱ, Defense & Security, Orlando, Florida, United States, 2005, 5798: 73-82.
[28] 罗远, 贺岩, 高敏, 等.用于空间交会对接过程中捕获、定位和追踪合作目标的激光雷达系统[C]//上海遥感与社会发展国际学术研讨会, 上海, 2013: 150-163.
Luo Y, He Y, Gao M, et al.A lidar system for acquisition, pointing, and tracking used in space rendezvous and docking with cooperative target[C]//Shanghai International Symposium on Remote Sensing and Social Development, Shanghai, 2013: 150-163.
[29] Pfennigbauer M, M bius B, do Carmo J P.Echo digitizing imaging lidar for rendezvous and docking[C]//Laser Radar Technology and Applications XIV, SPIE Defense, Security, and Sensing, Orlando, Florida, United States, 2009, 7323: 732302-1-732302-9.
[30] Abshire J B, Sun X L, Riris H, et al.Geoscience Laser Altimeter System (GLAS) on the ICESat Mission:On-orbit measurement performance[J].Geophysical Research Letters, 2005, 32(21):L21S02. http://cn.bing.com/academic/profile?id=9667b0074a2738ca3d21324bfd86e197&encoded=0&v=paper_preview&mkt=zh-cn
[31] Sun X L, Abshire J B, McGarry J F, et al.Space lidar developed at the NASA goddard space flight center-The first 20 years[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2013, 6(3):1660-1675. doi: 10.1109/JSTARS.2013.2259578
[32] Abshire J B.NASA's space lidar measurements of the earth and planets[C]//IEEE Photonics Society Meeting University of Maryland, Maryland, 2011.
[33] Seidleck M.The ice, cloud, and land elevation satellite-2-Overview, science, and applications[C]//IEEE Aerospace Conference, Big Sky, MT, USA, 2018: 1-8.
[34] Markus T, Neumann T, Martino A, et al.The Ice, Cloud, and land Elevation Satellite-2(ICESat-2):Science requirements, concept, and implementation[J].Remote Sensing of Environment, 2017, 190:260-273. doi: 10.1016/j.rse.2016.12.029
[35] Yu A W, Krainak M A, Harding D J, et al.Development effort of the airborne lidar simulator for the lidar surface topography (LIST) mission[C]//Lidar Technologies, Techniques, and Measurements for Atmospheric Remote Sensing VII, Prague, Czech Republic, 2011, 8182: 818207.
[36] Degnan J, McGarry J, Zagwodzki T, et al.Design and performance of an airborne multikilohertz, photon-counting, microlaser altimeter[C]//Proceedings of the ISPRS Workshop on Land Surface Mapping and Characterization Using Laser Altimetry, Annapolis, MD, 2001.
[37] Degnan J, Wells D, Machan R, et al.Second generation airborne 3D imaging lidars based on photon counting[C]//Advanced Photon Counting Techniques II, Boston, MA, United States, 2007, 6771: 6771ON.
[38] Gluckman J.Design of the processing chain for a high-altitude, airborne, single-photon lidar mapping instrument[C]//Laser Radar Technology & Applications XXI, Baltimore, Maryland, United States, 2016, 9832: 983203.
[39] Albota M A, Aull B F, Fouche D G, et al.Three-dimensional imaging laser radars with Geiger-mode avalanche photodiode arrays[J]. Lincoln Laboratory Journal, 2002, 13(2):351-370. http://cn.bing.com/academic/profile?id=71ed8e3bf3059932dafe211f2cf3926c&encoded=0&v=paper_preview&mkt=zh-cn
[40] Schultz K I, Kelly M W, Baker J J, et al.Digital-pixel focal plane array technology[J].Lincoln Laboratory Journal, 2014, 20(2):36-51. https://www.ll.mit.edu/sites/default/files/page/doc/2018-05/20_2_2_Schultz.pdf
[41] Marino R M, Davis W R Jr.Jigsaw:A foliage-penetrating 3D imaging laser radar system[J]. Lincoln Laboratory Journal, 2005, 15(1):23-36. http://www.ll.mit.edu/media/8146
[42] Vaidyanathan M, Blask S, Higgins T, et al.Jigsaw phase Ⅲ: a miniaturized airborne 3-D imaging laser radar with photon-counting sensitivity for foliage penetration[C]//Laser Radar Technology and Applications XII, Orlando, Florida, United States, 2007, 6550: 6550ON.
[43] Busck J, Heiselberg H.Gated viewing and high-accuracy three-dimensional laser radar[J].Applied Optics, 2004, 43(24):4705-4710. doi: 10.1364/AO.43.004705
[44] Busck J.Underwater 3-D optical imaging with a gated viewing laser radar[J].Optical Engineering, 2005, 44(11):116001. doi: 10.1117/1.2127895
[45] Laurenzis M, Christnacher F, Monnin D.Long-range three-dimensional active imaging with superresolution depth mapping[J].Optics Letters, 2007, 32(21):3146-3148. doi: 10.1364/OL.32.003146
[46] Zhang X D, Yan H M, Jiang Y B.Pulse-shape-free method for long-range three-dimensional active imaging with high linear accuracy[J].Optics Letters, 2008, 33(11):1219-1221. doi: 10.1364/OL.33.001219
[47] Zhang X D, Yan H M, Zhou Q.Overcoming the shot-noise limitation of three-dimensional active imaging[J].Optics Letters, 2011, 36(8):1434-1436. doi: 10.1364/OL.36.001434
[48] Zhang X D, Yan H M.Three-dimensional active imaging with maximum depth range[J].Applied Optics, 2011, 50(12):1682-1686. doi: 10.1364/AO.50.001682
[49] Jin C F, Sun X D, Zhao Y, et al.Gain-modulated three-dimensional active imaging with depth-independent depth accuracy[J].Optics Letters, 2009, 34(22):3550-3552. doi: 10.1364/OL.34.003550
[50] Jin C F, Zhao Y, Sun X D, et al.Scannerless gain-modulated three-dimensional laser imaging radar[C]//Lidar Remote Sensing for Environmental Monitoring XII, San Diego, California, United States, 2011, 8159: 1-15.
[51] Chen Z, Liu B, Wang S J, et al.Polarization-modulated three-dimensional imaging using a large-aperture electro-optic modulator[J].Applied Optics, 2018, 57(27):7750-7757. doi: 10.1364/AO.57.007750
[52] Chen Z, Liu B, Wang S J, et al.Efficient subpixel registration for polarization-modulated 3D imaging[J].Optics Express, 2018, 26(18):23040-23050. doi: 10.1364/OE.26.023040
-
访问统计
 下载:
下载:

 点击扫一扫
点击扫一扫
图(11)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


