
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要
为了对光纤陀螺仪随机误差进行分析处理,提高其使用精度,提出了一种经验模态分解与时间序列模型相结合的误差分析建模方法。以经验模态分解得到的本征模态函数为基础,分层进行ARMA建模;在模型基础上逐层进行Kalman滤波,实现对于随机漂移信号的滤除;最后通过信号重构,完成了从全频率角度对光纤陀螺仪随机误差进行分析建模的构想。与其他建模方法相比,该方法对于原始数据的模拟匹配程度更高,试验结果进一步表明,本文方法有效去除了光纤陀螺仪的随机漂移,提高了光纤陀螺仪的使用精度。

Abstract
In order to analyze and process the random error of the fiber optic gyroscope (FOG) and improve its use precision, an error modeling method that combined empirical mode decomposition (EMD) and time series model was proposed. On the basis of the intrinsic mode functions (Imf) which was obtained by empirical mode decomposition, auto-regressive and moving average model (ARMA) modeling is performed hierarchically for each Imf. Then, Kalman filtering is performed layer by layer on the basis of the model to remove the random drift signals from the real angular velocity information. At the end of the algorithm, the signal which had been filtered need to be reorganized, and through the above steps, the conception of analyzing and modeling in connection with the random error of FOG from full frequency's point of view was realized. Compared with other modeling methods, this method has a higher degree of simulation matching to the original data, at the same time, the experimental results have further shown that this method can effectively remove the signal of random drift from the fiber optic gyroscope's output signal and improve its use precision significantly.
-
Key words:
- FOG /
- random error /
- EMD /
- ARMA modeling /
- Kalman filtering
-
Overview

Overview: Moving object detection has been the focus of research in the field of machine vision and intelligent transportation. Its purpose is to segment the moving objects from the sequence of video images so as to make the next step for target recognition, tracking and navigation. However, under the complex dynamic background, many factors such as light changes, background interference, camera motion and so on, make the detection very poor. At present, the commonly used feature point detection algorithms include SIFT, SURF and ORB algorithm, but they cannot meet the requirements of moving target detection. BRISK algorithm has better rotation invariance, scale invariance and better robustness. BRISK algorithm is the best one in the image registration with larger blur, but the real-time performance of BRISK algorithm is worse than ORB algorithm. Aiming at the real-time and accuracy of moving object detection algorithm, this paper proposes a moving object detection algorithm based on improved BRISK feature matching. Firstly, the video frames are divided into blocks, the entropy of each sub-block is calculated. The sub-blocks are filtered by using the image entropy, so that sub-blocks whose local information is too concentrated can be removed so as to avoid the influence of excessive local feature points. Secondly, the AGAST algorithm is used to detect the feature points of the remaining sub-blocks and generates the corresponding feature descriptors. Then, the feature matching is performed according to the k-nearest neighbor algorithm, and the feature point pairs are further purified by the Euclidean distance. So as to achieve the purpose of further improving the accuracy of the algorithm, and provide reliable data for calculating the next motion parameters. An improved PROSAC method is used to extract the optimal feature points to estimate the background motion parameters, and the background motion compensation is completed by combining the six-parameter affine model. Finally, the frame difference method and morphological process to extract the moving target, and the Otsu method is used to obtain the optimal threshold to achieve a more complete segmentation of the moving target. In order to evaluate the detection effect of the algorithm, three groups of video images are used to verify the algorithm. The proposed algorithm removes 32.7% of the feature points and improves the running time of 1.1 s based on the original BRISK algorithm. The detection efficiency is better than the previous ORB algorithm to some extent, at the same time improves the matching efficiency to more than 75%, and enhances the anti-noise performance of the algorithm. The experimental results show that the proposed algorithm can improve the real-time performance and ensure the robustness of the proposed algorithm. Compared with the previous detection algorithms, this algorithm is more suitable for the detection of moving objects in the complex dynamic context.
-

-
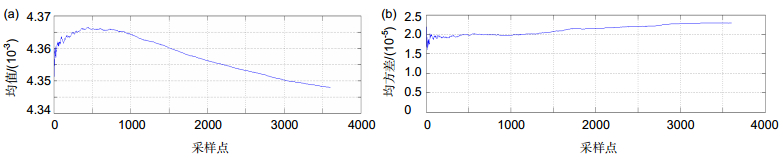
图 2 对于原始信号的非平稳性检验。(a)均值变化;(b)均方差变化
Figure 2. Non-stationary test of the original signal. (a) Mean change; (b) Mean variance variation
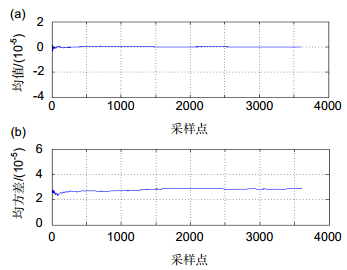
图 5 fimf1的均值和均方差检验。(a)均值变化;(b)均方差变化
Figure 5. Mean and mean square error test of fimf1. (a) Mean change; (b) Mean variance variation
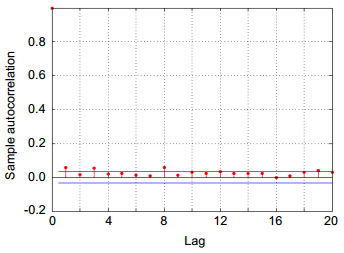
图 6 原始数据的偏相关系数特性
Figure 6. Partial correlation coefficient characteristics of raw data

图 7 原始数据的偏相关系数特性
Figure 7. Characteristics of partial correlation coefficient of raw data
表 1 ARMA模型的选择原则
Table 1. Selection principles of ARMA model
模型 自相关系数 偏相关系数 AR(p) 拖尾 p阶截尾 MA(q) q阶截尾 拖尾 ARMA(p, q) 拖尾 拖尾  下载: 导出CSV
下载: 导出CSV
表 2 本文方法与直接建模方法模型适应性检验结果对比
Table 2. Comparison of model adaptability test results between the present method and the direct modeling method
信号分量 模型 a1 a2 a3 a4 fimf1 AR(4) 0.5039 0.3110 0.0732 0.0105 fimf2 AR(4) -1.3904 1.6244 -0.9363 0.4655 fimf3 AR(4) -2.8311 3.5874 -2.2984 0.6686 fimf4 AR(4) -3.4971 4.8028 -3.0620 0.7692 fimf5 AR(4) -3.7904 5.4640 -3.5507 0.8783 fimf6 AR(4) -3.9151 5.7665 -3.7869 0.9356 fimf7 AR(3) -2.9976 2.9970 -0.9994 fimf8 AR(3) -2.9994 2.9991 0.9997 fimf9 AR(2) -2.0004 1.0005 fimf10 AR(2) -2.0001 1.0001 rn AR(2) -1.9989 0.9989
下载: 导出CSV
表 3 本文方法与直接建模方法模型适应性检验结果对比
Table 3. Comparison of model adaptability test results between the present method and the direct modeling method
数据 原始数据 fImf1 fImf2 fImf3 fImf4 fImf5 模型 AR(6) AR(4) AR(4) AR(4) AR(4) AR(4) 匹配率/% 74.66 85.47 87.65 90.83 98.62 99.84 数据 fImf6 fImf7 fImf8 fImf9 fImf10 rn 模型 AR(4) AR(3) AR(3) AR(2) AR(2) AR(2) 匹配率/% 99.99 100 100 100 100 100
下载: 导出CSV
表 4 本文方法与直接建模方法模型适应性检验结果对比
Table 4. Comparison of model adaptability test results between the present method and the direct modeling method
数据 验证数据 fImf1 fImf2 fImf3 fImf4 模型 AR(7) AR(5) AR(5) AR(4) AR(4) 匹配率/% 75.11 86.23 88.14 92.34 98.99 数据 fImf5 fImf6 fImf7 fImf8 rn 模型 AR(4) AR(3) AR(3) AR(2) AR(2) 匹配率/% 99.99 100 100 100 100
下载: 导出CSV
表 5 两种方法的Allan方差辨识结果比较
Table 5. Comparison of Allan variance identification results between two methods
信号类别 Q/μrad N/(°/h^(1/2)) B/(°/h) K/(°/h^(3/2)) R/(°/h^2) 原信号 2.1907e-06 1.4071e-07 9.9451e-07 5.7777e-05 0.00040756 法一 1.1934e-06 1.3462e-09 9.7363e-08 3.6707e-07 0.00009978 法二 1.8705e-06 1.5719e-08 7.4357e-07 6.5301e-06 0.00010984 验证数据 2.3429e-06 1.7826e-07 8.8903e-07 6.2401e-05 0.00038908 法一 1.2306e-06 1.4644e-09 7.9906e-08 4.4325e-07 0.00007629 法二 2.0907e-06 1.9898e-08 9.0176e-07 8.1987e-06 0.00018763
下载: 导出CSV
-
参考文献
[1] 朱文博, 刘宇, 陈根林.全断面掘进机光纤陀螺捷联寻北系统[J].光电工程, 2016, 43(10): 1-5. doi: 10.3969/j.issn.1003-501X.2016.10.001
Zhu W B, Liu Y, Chen G L. Fiber optic gyroscope strap-down north-seeker of full face tunnel boring machine[J]. Opto-Electronic Engineering, 2016, 43(10): 1-5. doi: 10.3969/j.issn.1003-501X.2016.10.001
[2] 陈贤, 杨建华, 周一览, 等.一种低噪声开关电源在光纤陀螺系统中的应用[J].光电工程, 2018, 45(1): 170517. 10.12086/oee.2018.170517
Chen X, Yang J H, Zhou Y L, et al. The application of low-noise DC-DC power source in fiber-optic gyroscope system[J]. Opto-Electronic Engineering, 2018, 45(1): 170517. 10.12086/oee.2018.170517
[3] Narasimhappa M, Nayak J, Terra M H, et al. ARMA model based adaptive unscented fading kalman filter for reducing drift of fiber optic gyroscope[J]. Sensors and Actuators A: Physical, 2016, 251: 42-51. doi: 10.1016/j.sna.2016.09.036
[4] Teng F, Jin J, Huang Y L, et al. Noise analysis and measurement of high sensitivity photonic crystal fiber-optic gyroscope[J]. Optical Fiber Technology, 2015, 25: 1-6. doi: 10.1016/j.yofte.2015.06.002
[5] 杨景花, 李华中.数据挖掘的光纤陀螺漂移值误差分析与研究[J].激光杂志, 2016, 37(6): 123-126. http://d.old.wanfangdata.com.cn/Periodical/jgzz201606030
Yang J H, Li H Z. Analysis and research of fiber optic gyro drift error based on data mining[J]. Laser Journal, 2016, 37(6): 123-126. http://d.old.wanfangdata.com.cn/Periodical/jgzz201606030
[6] 赵玉新, 李绪友, 刘承香, 等.光纤陀螺信号处理方法的比较研究[J].中国惯性技术学报, 2003, 11(2): 52-56. doi: 10.3969/j.issn.1005-6734.2003.02.012
Zhao Y X, Li X Y, Liu C X, et al. Comparative research in signal processing of FOG[J]. Journal of Chinese Inertial Technology, 2003, 11(2): 52-56. doi: 10.3969/j.issn.1005-6734.2003.02.012
[7] 马晋美, 朱家海, 谢聂, 等.基于小波-ARMA模型的光纤陀螺自适应滤波[J].光学技术, 2016, 42(5): 469-473. http://d.old.wanfangdata.com.cn/Periodical/gxjs201605018
Ma J M, Zhu J H, Xie N, et al. Adaptive filtering for fiber optic gyroscope based on wavelet-ARMA model[J]. Optical Technique, 2016, 42(5): 469-473. http://d.old.wanfangdata.com.cn/Periodical/gxjs201605018
[8] 崔冰波, 陈熙源, 宋锐. EMD阈值滤波在光纤陀螺漂移信号去噪中的应用[J].光学学报, 2015, 35(2): 0207001. http://xueshu.baidu.com/s?wd=paperuri%3A%2867e285f634c945042692cb0c94a1e4dc%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fkns.cnki.net%2FKCMS%2Fdetail%2Fdetail.aspx%3Ffilename%3DGXXB201502008%26dbname%3DCJFD%26dbcode%3DCJFQ&ie=utf-8&sc_us=18329933652869835492
Cui B B, Chen X Y, Song R. Application of EMD threshold filtering for fiber optical gyro drift signal de-noising[J]. Acta Optica Sinica, 2015, 35(2): 0207001. http://xueshu.baidu.com/s?wd=paperuri%3A%2867e285f634c945042692cb0c94a1e4dc%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fkns.cnki.net%2FKCMS%2Fdetail%2Fdetail.aspx%3Ffilename%3DGXXB201502008%26dbname%3DCJFD%26dbcode%3DCJFQ&ie=utf-8&sc_us=18329933652869835492
[9] 田云鹏, 杨小军, 郭云曾, 等.光纤陀螺随机噪声滤波分析[J].光学学报, 2015, 35(9): 906006. http://cdmd.cnki.com.cn/Article/CDMD-10007-1016717762.htm
Tian Y P, Yang X J, Guo Y Z, et al. Filtering analysis on the random noise of fiber optic guroscope[J]. Acta Optica Sinica, 2015, 35(9): 906006. http://cdmd.cnki.com.cn/Article/CDMD-10007-1016717762.htm
[10] 柴嘉薪, 王新龙, 王盾, 等.一种光纤陀螺随机振动误差高精度建模方法[J].航空兵器, 2017(4): 49-54. http://d.old.wanfangdata.com.cn/Periodical/hkbq201704009
Chai J X, Wang X L, Wang D, et al. A high precision modeling method for random vibration error of fiber optic gyroscope[J]. Aero Weaponry, 2017(4): 49-54. http://d.old.wanfangdata.com.cn/Periodical/hkbq201704009
[11] Wu Z H, Huang N E. A study of the characteristics of white noise using the empirical mode decomposition method[J]. Proceedings: Mathematical, Physical and Engineering Sciences, 2004, 460(2046): 1597-1611. doi: 10.1098/rspa.2003.1221
[12] Huang N E, Wu M L, Qu W D, et al. Applications of Hilbert-Huang transform to non-stationary financial Time series analysis[J]. Applied Stochastic Models in Business And Industry, 2003, 19(3): 245-268. doi: 10.1002/(ISSN)1526-4025
[13] 杨远洪, 孟晨雪.光纤陀螺零偏误差特性及噪声分析方法研究[J].光学学报, 2014, 34(12): 1206006. http://xueshu.baidu.com/s?wd=paperuri%3A%28a487d3efaab519daea0dd4352adf0ec3%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fkns.cnki.net%2FKCMS%2Fdetail%2Fdetail.aspx%3Ffilename%3DGXXB201412009%26dbname%3DCJFD%26dbcode%3DCJFQ&ie=utf-8&sc_us=2322162592058237249
Yang Y H, Meng C X. Research on the characteristic of bias error and noise analysis method of fiber optic gyroscope[J]. Acta Optica Sinica, 2014, 34(12): 1206006. http://xueshu.baidu.com/s?wd=paperuri%3A%28a487d3efaab519daea0dd4352adf0ec3%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fkns.cnki.net%2FKCMS%2Fdetail%2Fdetail.aspx%3Ffilename%3DGXXB201412009%26dbname%3DCJFD%26dbcode%3DCJFQ&ie=utf-8&sc_us=2322162592058237249
[14] 白俊卿, 张科, 卫育新.光纤陀螺随机漂移建模与分析[J].中国惯性技术学报, 2012, 20(5): 621-624. doi: 10.3969/j.issn.1005-6734.2012.05.024
Bai J Q, Zhang K, Wei Y X. Modeling and analysis of fiber optic gyroscope random drifts[J]. Journal of Chinese Inertial Technology, 2012, 20(5): 621-624. doi: 10.3969/j.issn.1005-6734.2012.05.024
[15] IEEE. IEEE standard specification format guide and test procedure for single-axis laser gyros: STD 647—2006[S]. New York: IEEE, 2006.
[16] Morrow R B, Heckman D W. High precision IFOG insertion into the strategic submarine navigation system[C]//Proceedings of 1998 Position Location and Navigation Symposium. Palm Springs, CA, USA, 1998: 332-338.
-
访问统计



 点击扫一扫
点击扫一扫
图(9)
表(5)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


