
 E-mail Alert
E-mail Alert RSS
RSS
Research and implementation of target tracking algorithm in compression domain on miniaturized DSP platform
-
摘要
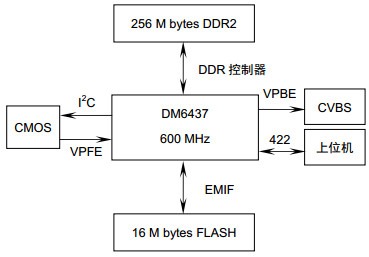
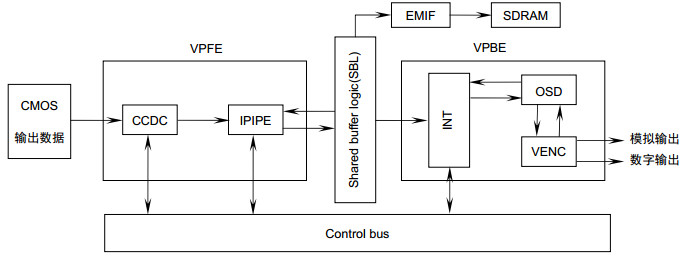
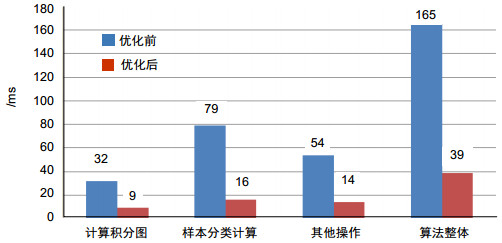
本文对基于压缩感知的压缩域目标跟踪算法进行了研究,为满足特定的应用场合要求,针对原算法的不足进行了改进,同时基于小型化低成本目标位置探测器设计思想及需求,设计并实现了以TMS320DM6437数字信号处理器为核心的实时图像跟踪处理平台,对算法在该DSP平台进行了实现与优化。仿真和实验结果表明,经过结合卡尔曼滤波器、融合LBP特征以及添加自适应学习速率更新策略等措施,算法的鲁棒性得到提高;对算法在DSP中的实现,经过一系列优化措施,对分辨率为960×960的视频图像,当取目标窗口为80×80时,处理速度可达25 f/s,能够满足实时性跟踪要求。系统能够对选定的运动目标进行连续、稳定地跟踪,能够满足特定应用场合下的目标位置探测与跟踪需求,具有一定的实用性,同时也对该类目标跟踪方法在嵌入式平台的研究与应用具有一定的参考价值。

Abstract
The target tracking algorithm in compression domain based on compression perception is studied. To meet the specific application requirements, the shortcomings of original algorithm are improved. At the same time, based on the design idea and demand of miniaturized target position detector, a real-time image processing platform with TMS320DM6437 digital signal processor as the core is designed and implemented, and the algorithm is implemented and optimized on the DSP platform. The simulation and experiment results show that after the combination of Kalman filter, LBP feature and adding adaptive learning rate update strategy, the stability of the algorithm is improved. For the implementation in DSP, after a series of optimizing measures, as for an image with resolution of 960×960, taking the target window of 80×80 into account, the computation speed can be up to 25 fps, which can meet the requirement of real-time tracking. The embedded tracking system can track the selected moving objects continuously and stably, and can meet the target localization and tracking requirements under specific applications, which has a real practical value. Moreover, the method in this paper has a certain reference value for the research and applications of this kind of target tracking method in the embedded platform.
-
Key words:
- target tracking /
- DSP /
- compression domain /
- algorithm optimization /
- real-time tracking
-
Overview

Target tracking is the key technology of many computer vision systems, and has important application value ina range of military and civil fields such as weapon guidance, intelligent transportation system, medical image system,virtual reality and so on. The essence of target tracking is to determine the position of the target in successive frames of avideo. Classic ideas of target tracking in videos are based on the surface model representing the target object, whichtranslates the tracking problem into the problem of maximizing the similarity coefficient between the model and thecandidate distribution. This kind of method is often with large computation complexity, and as for the platform withlimited resources, the robustness, accuracy and real-time performance are difficult to achieve a good balance. On theother side, tracking method based on decision model is the research hot spot in the field of target tracking. It treats thetarget localization as a binary classification problem, by designing classifiers to distinguish the target from the background effectively to achieve the aim of target tracking. This method is often able to achieve a higher frame rate, but inembedded system, relative research and applications are still very imperfect. Target tracking algorithms based on compress sensing in compression domain fuses these two types of target tracking methods, and often have low computational complexity, high accuracy and stability. However, there are still some problems to be solved in some applications. Thetarget tracking algorithm in compression domain based on compression perception is studied, and in order to meet thespecific application requirements, the shortcomings of original algorithm are improved. At the same time, based on thedesign idea and demand of miniaturized target position detector, a real-time image processing platform withTMS320DM6437 digital signal processor as the core is designed and implemented, and the algorithm is implementedand optimized on the DSP platform. The simulation and experiment results show that after the combination of Kalmanfilter, LBP feature and adding adaptive learning rate update strategy, the stability of the algorithm is improved. For theimplementation in DSP, after a series of optimizing measures, as for an image with resolution of 960 × 960, taking thetarget window of 80 × 80 into account, the computation speed can be up to 25 f/s, which can meet the requirement ofreal-time tracking. The embedded tracking system can track the selected moving objects continuously and stably, andcan meet the target localization and tracking requirements under specific applications, which has a real practical value.Morevoer, the method in this paper has a certain reference value for the research and applications of this kind of targettracking method in the embedded platform.
-

-
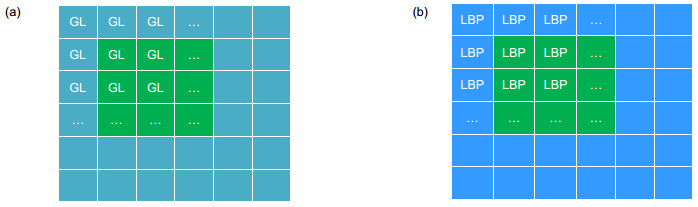
图 3 基于不同编码算法的Haar-like特征. (a)基于灰度值编码的Haar-like特征. (b)基于LBP值编码的Haar-like特征.
Figure 3. Haar-like features based on different coding algorithm. (a) Haar-like features based on gray level. (b) Haar-like features based on LBP value.

图 11 David-indoor序列测试结果. (a)改进前第313帧. (b)改进后第313帧. (c)改进前第329帧. (d)改进后第329帧.
Figure 11. David-indoor sequence test result. (a), (c): The 313th frame (a) and the 329th frame (c) before algorithm improvement. (b), (d): The 313th frame (b) and the 329th frame (d) after algorithm improvement.

图 12 Kite-surf序列测试结果. (a)改进前第38帧. (b)改进后第38帧. (c)改进前第65帧. (d)改进后第65帧.
Figure 12. Kite-surf sequence test result. (a), (c): The 38th frame (a) and the 65th frame (c) before algorithm improvement. (b), (d): The 38th frame (b) and the 65th frame (d) after algorithm improvement.

图 13 Box序列测试结果. (a)改进前第336帧. (b)改进后第336帧. (c)改进前第344帧. (d)改进后第344帧.
Figure 13. Box sequence test result. (a), (c): The 336th frame (a) and the 344th frame (c) before algorithm improvement. (b), (d): The 336th frame (b) and the 344th frame (d) after algorithm improvement.

图 14 Coke11序列测试结果. (a)改进前第24帧. (b)改进后第24帧. (c)改进前第85帧. (d)改进后第85帧.
Figure 14. Coke11 sequence test result. (a), (c): The 24th frame (a) and the 85th frame (c) before algorithm improvement. (b), (d): The 24th frame (b) and the 85th frame (d) after algorithm improvement.

图 15 算法改进前后目标跟踪误差比较. (a) Kite-surf序列测试结果. (b) Bolt序列测试结果.
Figure 15. Comparison of target tracking errors (before and after algorithm improvement). (a) Kite-surf sequence test result. (b) Bolt sequence test result.
-
参考文献
[1] 贾桂敏. 基于物体局部信息的跟踪算法研究[D]. 天津: 天津大学, 2008.
Jia Guimin. Research of target tracking based on local information[D]. Tianjin: Tianjin University, 2008.
[2] 王睿, 王林, 姜志威.基于DSP的主动视觉运动目标跟踪策略及实现[J].光电工程, 2009, 36(2): 6-10. http://doi.wanfangdata.com.cn/10.3969/j.issn.1003-501X.2009.02.002
Wang Rui, Wang Lin, Jiang Zhiwei. Active visual system for moving object intelligent tracking based on DSP[J]. Opto-Electronic Engineering, 2009, 36(2): 6-10. http://doi.wanfangdata.com.cn/10.3969/j.issn.1003-501X.2009.02.002
[3] Grabner H, Grabner M, Bischof H. Real-time tracking via on-line boosting[C]// Proceedings of British Machine Vision Conference, 2006, 1: 6.
[4] Kalal Z, Mikolajczyk K, Matas J. Tracking-learning-detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(7): 1409-1422. doi: 10.1109/TPAMI.2011.239
[5] Zhang Kaihua, Zhang Lei, Yang M H. Real-time compressive tracking[C]//Proceedings of the 12th European Conference on Computer Vision, 2012.
[6] 李庆武, 朱国庆, 周妍, 等.基于特征在线选择的目标压缩跟踪算法[J].自动化学报, 2015, 41(11): 1961-1970. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_zdhxb201511012
Li Qingwu, Zhu Guoqing, Zhou Yan, et al. Object compressive tracking via online feature selection[J]. Acta Automatica Sinica, 2015, 41(11): 1961-1970. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_zdhxb201511012
[7] Liu Qingshan, Yang Jing, Zhang Kaihua, et al. Adaptive compressive tracking via online vector boosting feature selection[J]. IEEE Transactions on Cybernetics, 2015, PP(99): 1-13, doi: 10.1109/TCYB.2016.2606512. (in Press)
[8] Chan Sixian, Zhou Xiaolong, Li Junwei, et al. Adaptive compressive tracking based on locality sensitive histograms[J]. Pattern Recognition, 2017, 72: 517-531. doi: 10.1016/j.patcog.2017.07.006
[9] Yao Xuan, Zhou Yue. Real-time compressive tracking with a particle filter framework[C]//International Conference on Neural Information Processing, Cham, 2014: 242-249.
[10] Johnson W B, Lindenstrauss J. Extensions of Lipschitz mappings into a Hilbert space[J]. Contemporary Mathematies, 1984, 26: 189-206 doi: 10.1090/conm/026
[11] Diaconis P, Freedman D. Asymptotics of graphical projection pursuit[J]. The Annals of Statistics, 1984, 12(3): 793-815. doi: 10.1214/aos/1176346703
[12] 潘秋萍, 杨万扣, 孙长银.基于Haar与MB-LBP特征的车牌检测算法[J].东南大学学报(自然科学版), 2012, 42(Z1): 74-77. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dndx2012s1017&dbname=CJFD&dbcode=CJFQ
Pan Qiuping, Yang Wankou, Sun Changyin. License plate detection algorithm based on Haar and MB-LBP features[J]. Journal of Southeast University (Natural Science Edition), 2012, 42(Z1): 74-77. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dndx2012s1017&dbname=CJFD&dbcode=CJFQ
[13] 房文涛, 王向军, 汤其剑.基于粒子滤波的机载目标跟踪系统设计[J].激光与红外, 2012, 42(7): 841-844. http://jyxy.tju.edu.cn/Precision/MOEMS/doc/p13.pdf
Fang Wentao, Wang Xiangjun, Tang Qijian. Object tracking system for MUAV based on particle filter[J]. Laser & Infrared, 2012, 42(7): 841-844. http://jyxy.tju.edu.cn/Precision/MOEMS/doc/p13.pdf
[14] 刘小宁, 陈晓冬, 郁道银.基于DSP的运动目标识别与跟踪系统的设计[J].电视技术, 2010, 34(11): 107-110. doi: 10.3969/j.issn.1002-8692.2010.11.032
Liu Xiaoning, Chen Xiaodong, Yu Daoyin. Design of moving target recognition and tracking system based on DSP[J]. Video Application & Project, 2010, 34(11): 107-110. doi: 10.3969/j.issn.1002-8692.2010.11.032
[15] 冯禹, 王向军, 陈文亮.相对位姿测量解算的DSP实现[J].传感技术学报, 2016, 29(1): 35-39. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cgjsxb201601007
Feng Yu, Wang Xiangjun, Chen Wenliang. DSP implementation of relative position and attitude calculation[J]. Chinese Journal of Sensors and Actuators, 2016, 29(1): 35-39. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cgjsxb201601007
[16] 彭志明, 李琳.基于IQmath库的定点DSP算法设计[J].单片机与嵌入式系统应用, 2010(9): 39-41. https://www.wenkuxiazai.com/doc/e684ef3be2bd960590c6777a.html
Peng Zhiming, Li Lin. Fixed-point DSP algorithm based on IQmath library[J]. Microcontrollers & Embedded System, 2010(9): 39-41. https://www.wenkuxiazai.com/doc/e684ef3be2bd960590c6777a.html
[17] 朱威, 韩巨峰, 郑雅羽, 等.基于DSP的全景视频多目标实时检测[J].光电工程, 2014, 41(5): 68-76. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201405012
Zhu Wei, Han Jufeng, Zheng Yayu, et al. Real-time detection of multi-object based on DSP processor for panoramic video[J]. Opto-Electronic Engineering, 2014, 41(5): 68-76. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201405012
[18] 李文龙, 刘利, 汤志忠.软件流水中的循环展开优化[J].北京航空航天大学学报, 2004, 30(11): 1111-1115. doi: 10.3969/j.issn.1001-5965.2004.11.019
Li Wenlong, Liu Li, Tang Zhizhong. Loop unrolling optimization for software pipelining[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(11): 1111-1115. doi: 10.3969/j.issn.1001-5965.2004.11.019
[19] 祝中科. 基于DM6467的车辆轮对磨耗检测算法的优化实现[D]. 杭州: 杭州电子科技大学, 2013.
Zhu Zhongke. Optimized for vehicle wheelset wear detection algorithm based on DM6437[D]. Hangzhou: Hangzhou DianZi University, 2013.
-
访问统计
 下载:
下载:

 点击扫一扫
点击扫一扫
图(16)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


