
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要
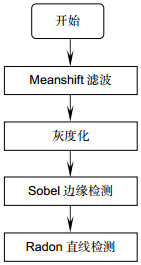
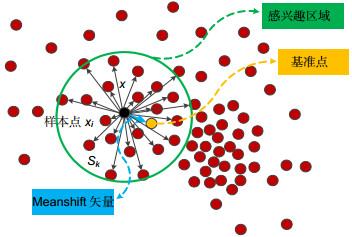
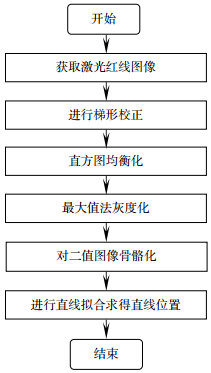
冲角是列车蛇形运动稳定性评价中的一关键性指标。由于列车走行步复杂、冲角值极小等原因,导致轮轨间冲角测量难度大、测量不准确等问题。本文提出一种基于激光线检测的轮轨冲角检测方法,该方法将与轮对运动方向共线的激光线照在轨面上,通过图像畸形校正、Meanshift算法平滑、Radon直线检测等算法处理分别获取轨道边缘线和激光线的位置,计算两者在图像中的夹角检测出轮轨冲角。通过仿真数据和检测结果对比表明,该方法能够实现轮轨冲角的图像检测,且原理简单可行,最后给出检测误差的修正方法,增加了检测方法的鲁棒性。该方法的提出为后续列车运行的稳定性和安全性评价奠定了基础。

Abstract
Attack angle is a key index to evaluate the stability of snakelike motion in the train. Due to the complexity of the running train and the small angle of attack, it is difficult to measure the angle between the wheel and rail. This paper presents a method for attack angle detection based on the laser line and the direction of motion as collinear wheel on the rail surface. The laser line and orbital edge line were obtained by image correction, Meanshift smoothing, and Radon line detection, and then the angle was calculated in the image. Comparison between simulation data and test results shows that the method can realize the detection of attack angle and it is simple and feasible at the same time. Finally, the correction method of the detection error is given, which increases the stability of the detection method. This method may lay the foundation for the evaluation of stability and safety of train operation.
-
Key words:
- attack angle /
- snake motion /
- image detection /
- laser line
-
Overview

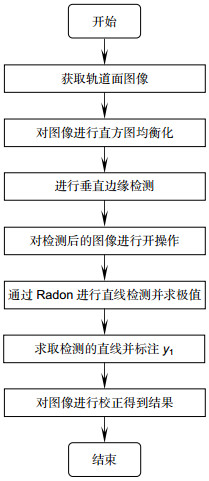
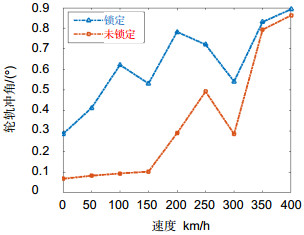
In the locomotive operation, because of the hunting motion caused by pure conical tread, a lateral force and complex creep force between the wheel and rail will emerge and result in attack angle between the wheel and rail when crossing a curve line. Although the attack angle is microscopic, it affects the wheel/rail contact loss and vehicle safety seriously and attack angle is a key index to evaluate the stability of snakelike motion in the train. Monitoring and analyzing the wheel/rail contact condition and the change of attack angle in the locomotive operation play a significant role in the stability and safety of vehicle operation. Due to the complexity of the running train and the small angle of attack, it is difficult to measure the angle between the wheel and rail. A method for combining the on-board camera with the laser line is presented to complete the image acquisition and detect the attack angle based on the laser line and the direction of motion as collinear wheel on the rail surface. The laser line and orbital edge line are obtained by some algorithms such as image pre-processing algorithm, image correction, Meanshift smoothing, and Radon line detection. The angle between the laser line and orbital edge in the image can be got through a series of image processing algorithms, which can reflect the attack angle in the running of locomotive. Radon detection algorithm is used to detect the relative position between laser line and rail edge line, and different conditions of undershooting changes are compared by simulation. The comparison between simulation data and experimental data shows that the method can simply realize the detection of attack angle and it is feasible enough. The results of detection illustrate that the change of attack angle is between 0.355 and -0.72 degrees, and the maximum error is 0.091 degrees. Finally, the correction method of the detection error and measurement accuracy analysis is given, which increases the stability of the detection method and demonstrates that it can meet the demand in engineering applications. It costs about 500 ms when the system completes primary detection of attack angle, which indicates that the detection speed is fast enough, and it can meet the detection requirements in engineering applications. However, some factors such as illumination and external vibration still need to be further studied to emphasize the robustness of the system. This method lays a foundation for further monitoring the condition of train operation and improving the safety mechanism of train.
-

-
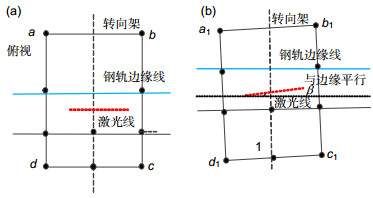
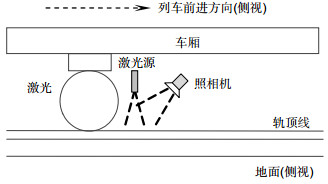
图 3 不同时刻冲角检测示意图. (a)无冲角. (b)有冲角.
Figure 3. Schematic diagram of the attack angle at different time. (a) Have no attack angle. (b) Have attack angle.
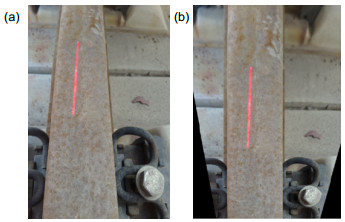
图 5 梯形校正前(a)和校正后(b)对比图.
Figure 5. Comparison before and after trapezoidal calibration. (a) Before calibration. (b) After calibration.
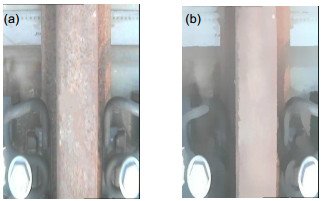
图 8 图像Meanshift平滑前后对比. (a)平滑前. (b)平滑后.
Figure 8. The comparison before and after Meanshift. (a) Before Meanshift. (b) After Meanshift.
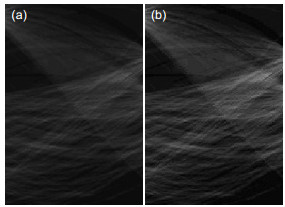
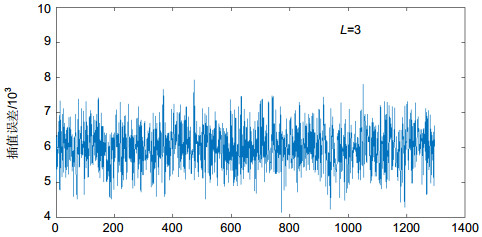
图 10 不同参数下的Radon变换结果.
Figure 10. Radon transformation under different parameters. (a) Min interpolation error. (b) Max interpolation error
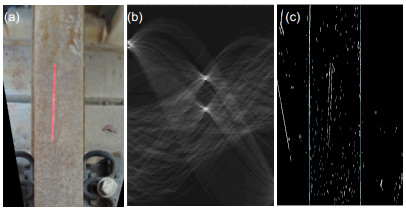
图 11 校正后轨道边缘检测结果.
Figure 11. Results of track edge detection. (a) Input image. (b) Radon transform. (c) The line radon.
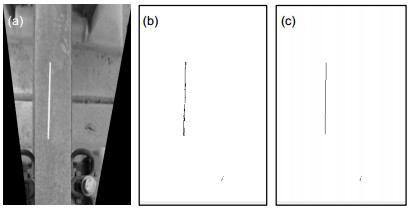
图 13 激光线的提取结果图. (a)灰度图像. (b)骨骼图像. (c)拟合直线.
Figure 13. Extraction results of laser line. (a) Gray images. (b) Skeleto image. (c) Fitted straight line.

图 14 轮轨冲角仿真图. (a)第一轮轨冲角. (b)第三轮轨冲角.
Figure 14. Simulation diagram of wheel rail attack angle. (a) Simulation of wheel rail attack angle of first axle. (b) Simulation of wheel rail attack angle of third axle.
表 1 检测结果及误差分析.
Table 1. Test result and error analysis.
Group number Group 1 Group 2 Group 3 Group 4 Group 5 Group 6 Group 7 Group 8 Fit-slope 1/k 0.0121 0.0092 0.0103 0.0084 0.0106 0.0073 0.0152 0.0062 Left lateral coordinate 165 156 264 182 167 187 159 153 Attack angle/β 0.693 0.749 0.527 0.481 0.607 0.418 0.871 0.355 Test table settings 0.72 0.84 0.55 0.45 0.65 0.40 0.85 0.40 Absolute errors 0.027 -0.091 -0.023 0.031 0.043 0.018 -0.021 -0.055 Average error -0.016  下载: 导出CSV
下载: 导出CSV
表 2 9组检测和实际数据.
Table 2. Nine group test and actual data.
No. (△ui, △vi) 1/tanα Detect distance/mm Actual distance/mm 1 (3, 265) 0.0113 102.4 103.00 2 (3, 275) 0.0109 103.7 103.00 3 (3, 269) 0.0111 102.7 103.00 4 (4, 402) 0.0099 163.5 163.00 5 (4, 396) 0.0101 162.8 163.00 6 (4, 406) 0.0098 164.1 163.00 7 (5, 466) 0.0107 195.9 196.00 8 (5, 471) 0.0106 196.6 196.00 9 (5, 475) 0.0105 197.1 196.00
下载: 导出CSV
-
参考文献
[1] 肖新标. 复杂环境状态下高速列车脱轨机理研究[D]. 成都: 西南交通大学, 2013.
http://cdmd.cnki.com.cn/Article/CDMD-10613-1014251615.htm [2] 李呈祥. 高速列车运行横移及侧滚姿态主动控制研究[D]. 北京: 北京交通大学, 2014.
http://cdmd.cnki.com.cn/Article/CDMD-10004-1014178155.htm [3] 程力.基于轮轨表达式的轮轨接触坐标计算方法[J].兰州工业学院学报, 2015, 22(2): 19-22. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lzgygdzkxx201502005
Chen Li. Computing method of the wheel-rail contact coordinate based on the wheel-rail expression[J]. Journal of Lanzhou Institute of Technology, 2015, 22(2): 19-22. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lzgygdzkxx201502005
[4] 陈建政. 轮轨作用力和接触点位置在线测量理论研究[D]. 成都: 西南交通大学, 2008.
http://cdmd.cnki.com.cn/Article/CDMD-10613-2008178956.htm [5] 干锋, 戴焕云.基于空间矢量映射的新型轮轨接触点算法[J].机械工程学报, 2015, 51(10): 119-128. http://mall.cnki.net/magazine/Article/JXXB201510019.htm
Gan Feng, Dai Huanyun. New wheel-rail contact point algorithm method based on the space vector mapping principle[J]. Journal of Mechanical Engineering, 2015, 51(10): 119-128. http://mall.cnki.net/magazine/Article/JXXB201510019.htm
[6] 钟浩. 基于改善轮轨接触状态的重载车轮型面优化[D]. 成都: 西南交通大学, 2014.
http://cdmd.cnki.com.cn/Article/CDMD-10613-1014252240.htm [7] Polach O. Influence of wheel/rail contact geometry on the behavior of a railway vehicle at stability limit[C]// Proceedings of the ENOC-2005, Eindhoven, Netherlands, 2005: 2203-2210.
https://www.researchgate.net/publication/228526991_Influence_of_wheelrail_contact_geometry_on_the_behaviour_of_a_railway_vehicle_at_stability_limit [8] 庞国斌, 吴成德, 李刚, 等.机车轮轨冲角测试系统研究[J].内燃机车, 2005(12): 16-19. doi: 10.3969/j.issn.1003-1820.2005.12.004 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=lrjx200512004&dbname=CJFD&dbcode=CJFQ
[9] Koo J S, Choi S Y. Theoretical development of a simplified wheelset model to evaluate collision-induced derailments of rolling stock[J]. Journal of Sound and Vibration, 2012, 331(13): 3172-3198. doi: 10.1016/j.jsv.2012.02.014 https://www.researchgate.net/publication/256800175_Theoretical_development_of_a_simplified_wheelset_model_to_evaluate_collision-induced_derailments_of_rolling_stock
[10] 马贺, 张军, 张秀娟, 等.冲角对低地板车辆轮轨接触状况的影响[J].机械工程学报, 2015, 51(24): 112-117. http://mall.cnki.net/magazine/Article/JXXB201524015.htm
Ma He, Zhang Jun, Zhang Xiujuan, et al. Influence of attack angle on wheel/rail contact of low-floor vehicles[J]. Journal of Mechanical Engineering, 2015, 51(24): 112-117. http://mall.cnki.net/magazine/Article/JXXB201524015.htm
[11] 李国顺, 金炜, 范荣巍.基于图像识别的轮轨冲角测量系统研究[J].中国铁道科学, 2005, 26(5): 82-85. http://d.wanfangdata.com.cn/Periodical_zgtdkx200505017.aspx
Li Guoshun, Jin Wei, Fan Rongwei. Research on the measurement system of the attack angle between wheel and rail based on image identification[J]. China Railway Science, 2005, 26(5): 82-85. http://d.wanfangdata.com.cn/Periodical_zgtdkx200505017.aspx
[12] 肖绯雄, 史炎.轮轨冲角测量装置的研究[J].内燃机车, 1997(2): 44-48. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=tdxb198803011&dbname=CJFD&dbcode=CJFQ
[13] 肖乾, 徐红霞, 成棣, 等.不同轮轨冲角下高速轮轨稳态滚动接触的蠕滑特性[J].中国铁道科学, 2014, 35(1): 60-66. http://www.doc88.com/p-6897795436750.html
Xiao Qian, Xu Hongxia, Cheng Di, et al. Creep characteristics of high-speed wheel-rail steady-state rolling contact under different attack angles[J]. China Railway Science, 2014, 35(1): 60-66. http://www.doc88.com/p-6897795436750.html
[14] 张宇. 数字图像梯形畸变校正算法研究与视频实时校正应用[D]. 合肥: 安徽大学, 2014.
http://cdmd.cnki.com.cn/Article/CDMD-10357-1014229339.htm [15] 郑丽颖, 何萌萌, 刘娇.改进的广义插值傅里叶变换方法[J].应用科技, 2015, 42(3): 55-59, 64. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_yykj201503012
Zheng Liying, He Mengmeng, Liu Jiao. Method for improving the generalized interpolated Fourier transform[J]. Applied Science and Technology, 2015, 42(3): 55-59, 64. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_yykj201503012
[16] 蒋超, 牛宏侠.基于改进Radon变换的直线钢轨识别算法[J].铁道标准设计, 2017, 61(4): 19-22. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=tdbs201704005&dbname=CJFD&dbcode=CJFQ
Jiang Chao, Niu Hongxia. Linear rail recognition algorithm based on improved radon transform[J]. Railway Standard Design, 2017, 61(4): 19-22. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=tdbs201704005&dbname=CJFD&dbcode=CJFQ
[17] Easton R L Jr, Barrett H H. Tomographic transformations in optical signal processing[M]. New York: Academic Press, 1987: 335-386.
[18] Shi Daming, Zheng Liying, Liu Jigang. Advanced Hough transform using a multilayer fractional Fourier method[J]. IEEE Transactions on Image Processing, 2010, 19(6): 1558-1566. doi: 10.1109/TIP.2010.2042102 http://cn.bing.com/academic/profile?id=3565b96af3a9928389bab539589edb3c&encoded=0&v=paper_preview&mkt=zh-cn
[19] Pan Wei, Qin Kaihuai, Chen Yao. An adaptable-multilayer fractional fourier transform approach for image registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(3): 400-413. doi: 10.1109/TPAMI.2008.83 http://cn.bing.com/academic/profile?id=b969c9cc53cdfb6d5cacaf5cd1d93616&encoded=0&v=paper_preview&mkt=zh-cn
-
访问统计
 点击扫一扫
点击扫一扫

图(18)
表(2)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


