
 E-mail Alert
E-mail Alert RSS
RSS
Wide-band disturbance rejection technique of dual observer for an inertially stabilized platform
-
摘要
如何增强光学载荷与运动平台间的主动隔振能力一直是光电跟踪系统面临的难题。提出一种双观测器方法实现惯性稳定平台中的宽频扰动抑制。双观测器方法包含两方面:其一,经典误差观测器通过低通滤波器的设计而具有较强的低频抑制能力;其二,饱和加速度扰动观测器根据自身稳定性条件调整饱和阈值与滤波器带宽,改善其扰动抑制特性并完成对中高频扰动的抑制。双观测器综合了二者的优势,同时分析了两种观测器间的相互作用以更好地参数化。所提方法在惯性稳定装置中进行了闭环验证,实验结果表明,双观测器可在单频及混频扰动下提升系统闭环性能。
Abstract
Increasing the active vibration isolation capability between the optical payload and the motion platform has always been a challenge for optoelectronic tracking systems. Therefore, a dual observer method is proposed to achieve wide-band disturbance rejection for an inertially stabilized platform. The dual observer method consists of two aspects. Firstly, a classical error observer has a strong low-frequency suppression ability through the design of a low-pass filter. Secondly, a saturated acceleration disturbance observer improves its disturbance suppression characteristics and completes the rejection of medium and high-frequency disturbances by adjusting the saturation threshold and filter bandwidth according to its stability conditions. The dual observer combines both advantages, and the interaction between the two observers is analyzed for better parameterization. Closed-loop verification of the proposal is carried out using the inertial stabilization device. The experimental results show that the dual observer can improve the closed-loop performance under both single-frequency and mixed-frequency disturbances.
-
Overview
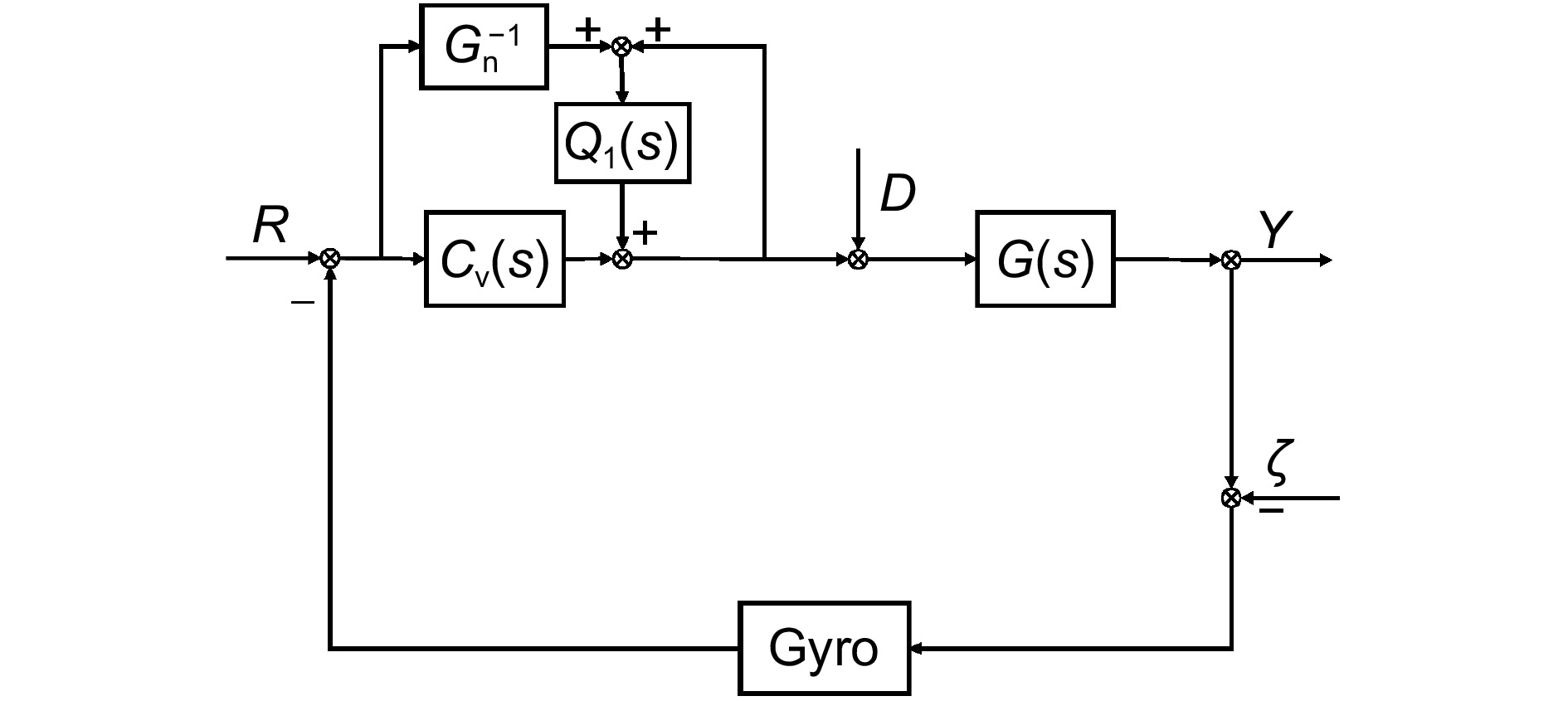
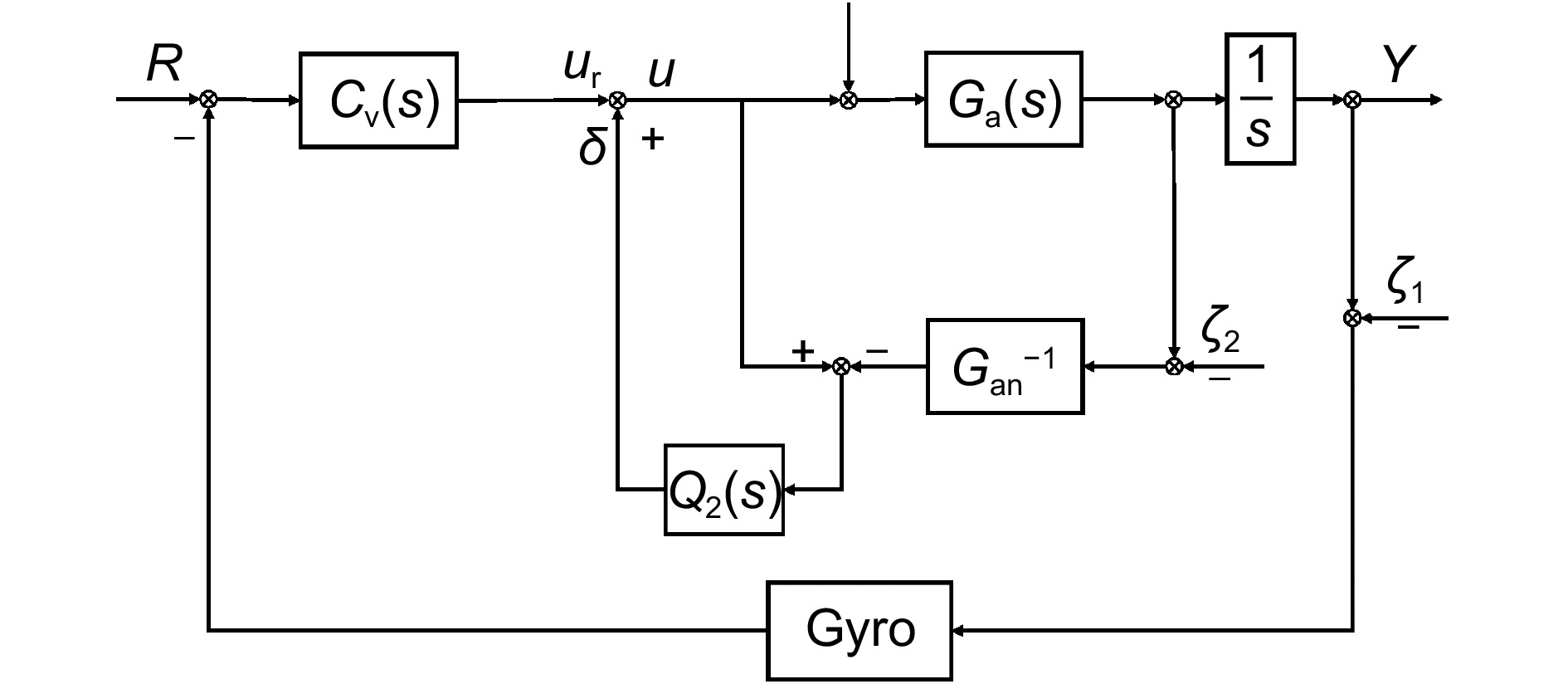
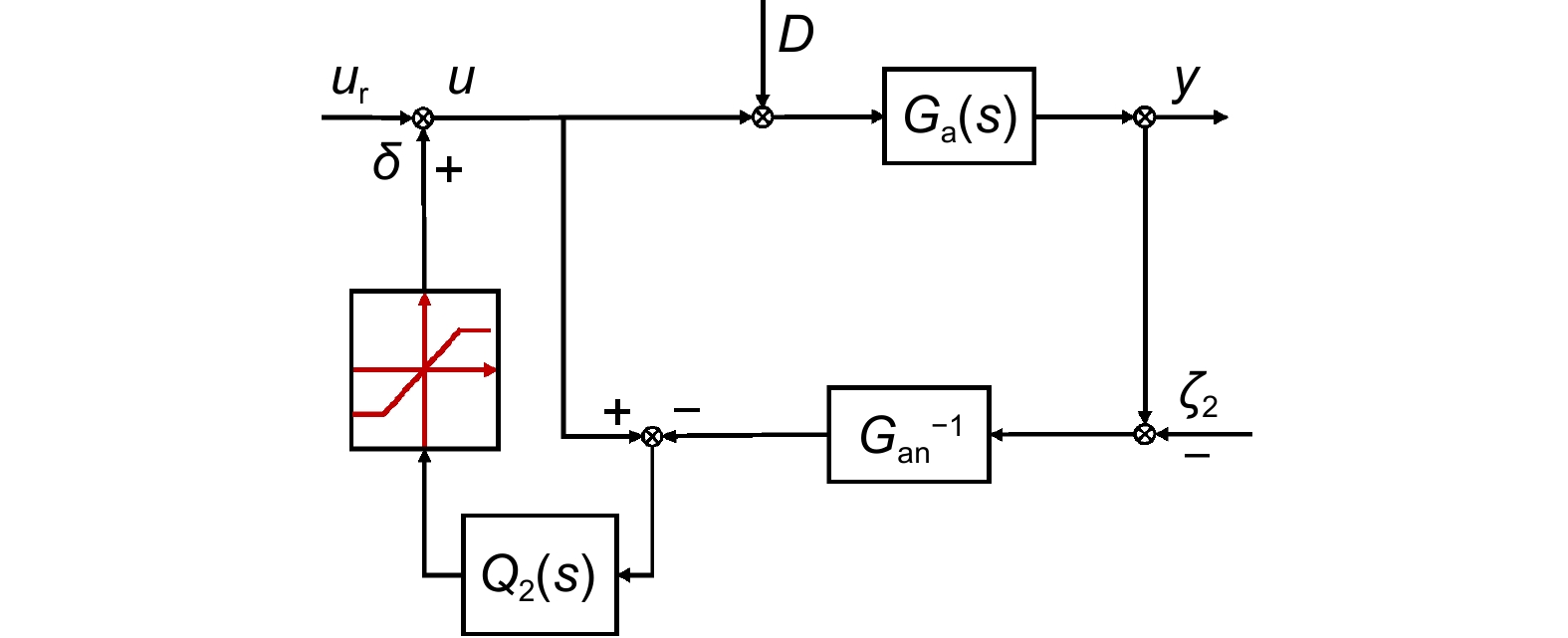
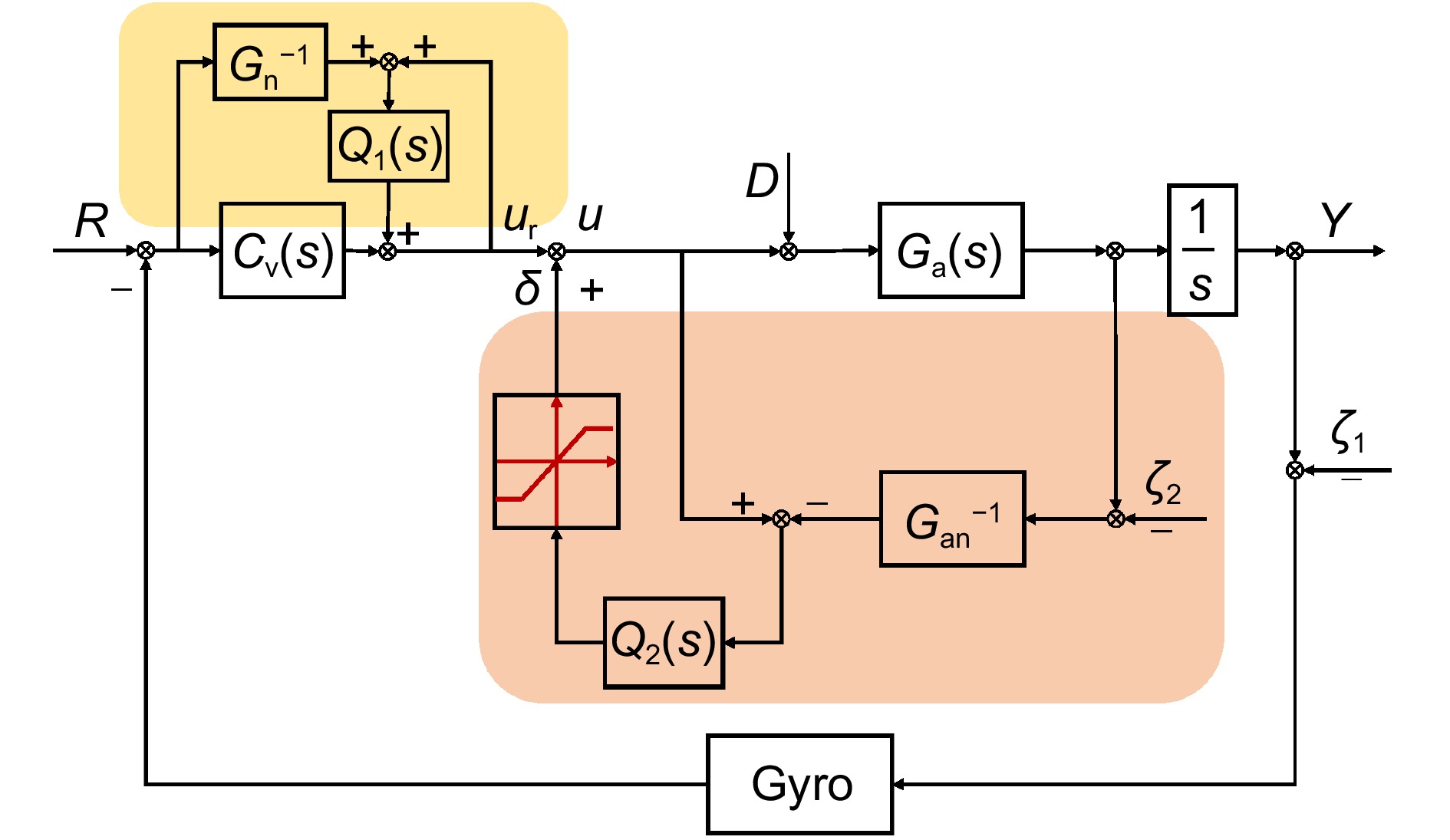
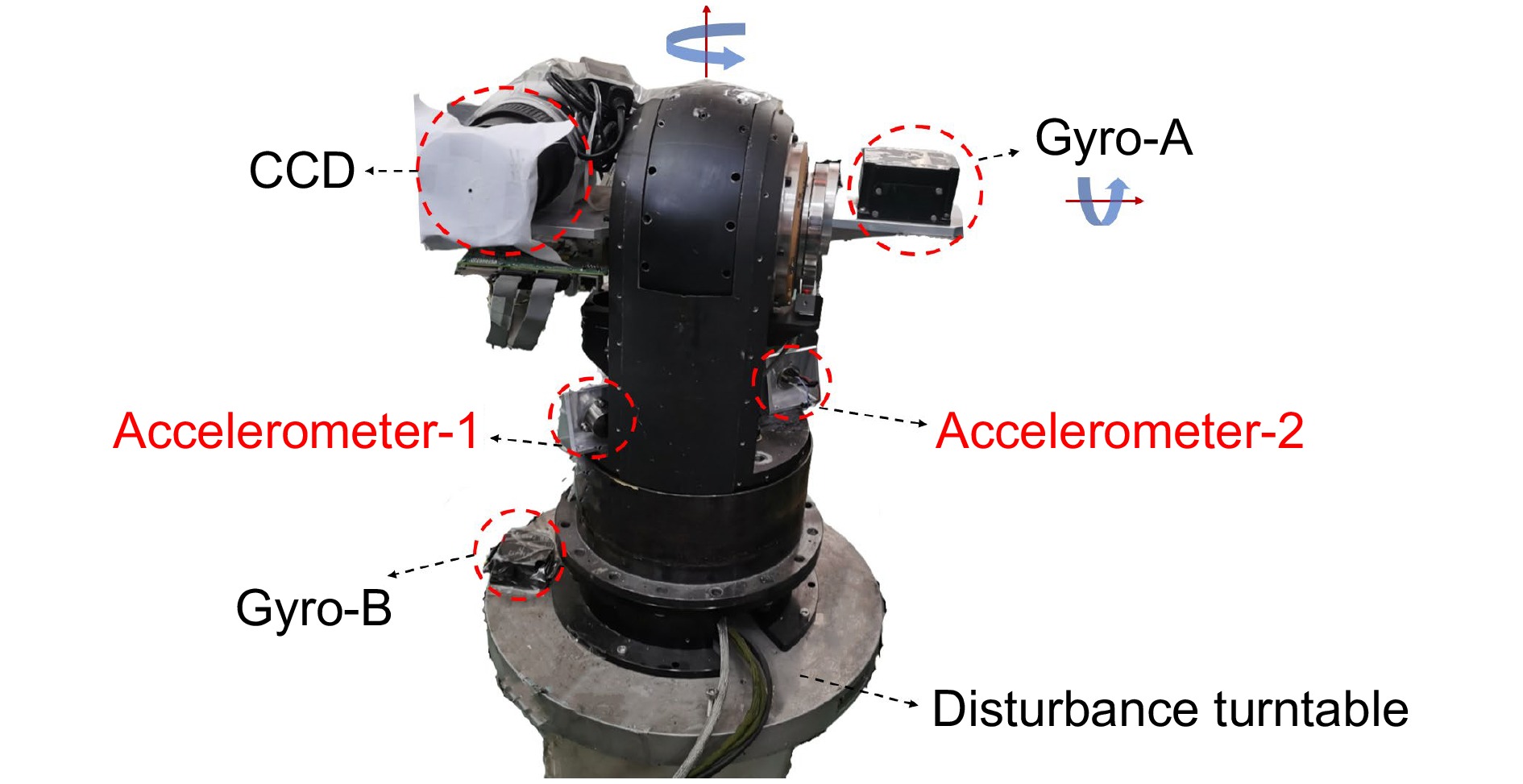
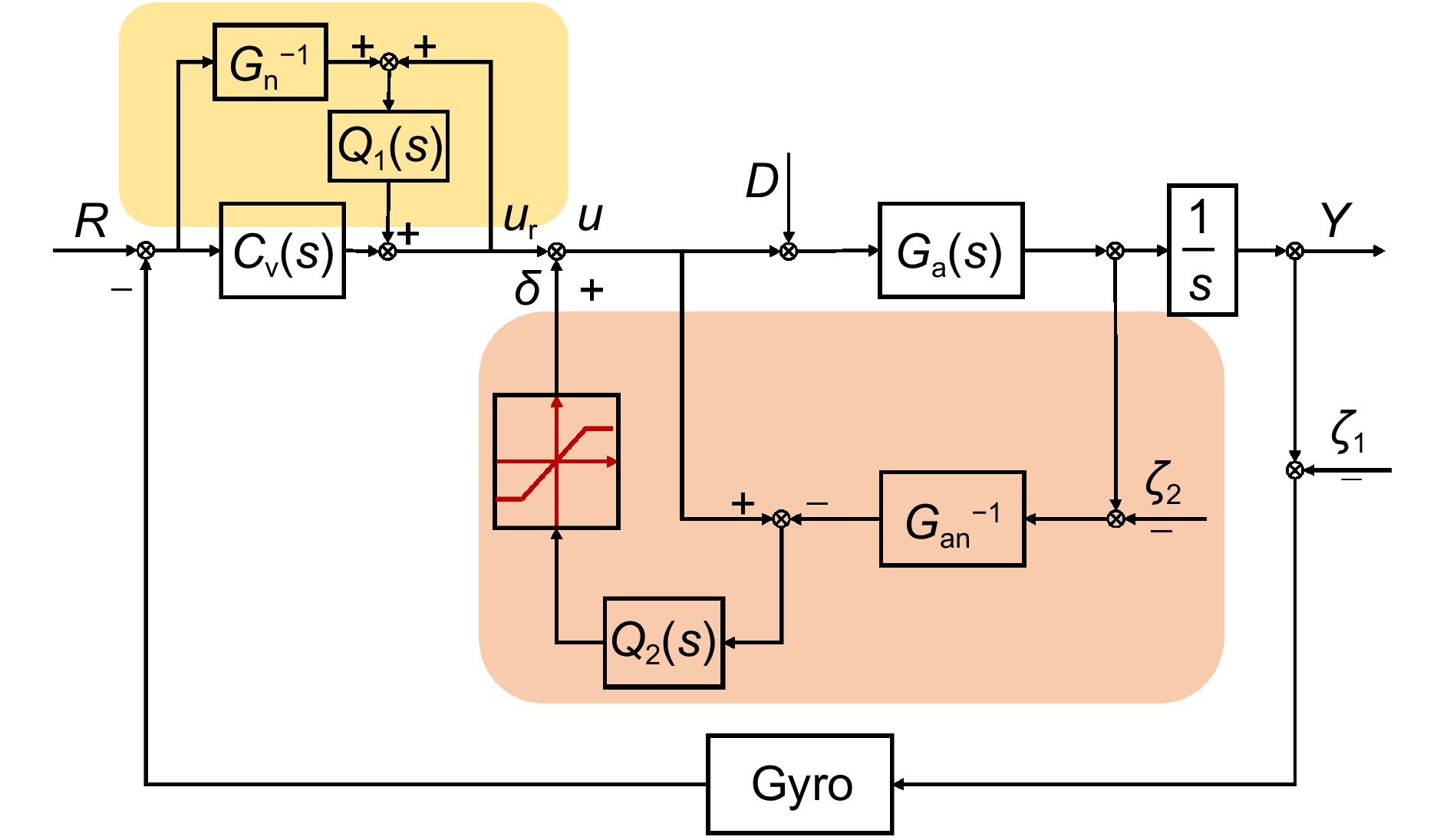
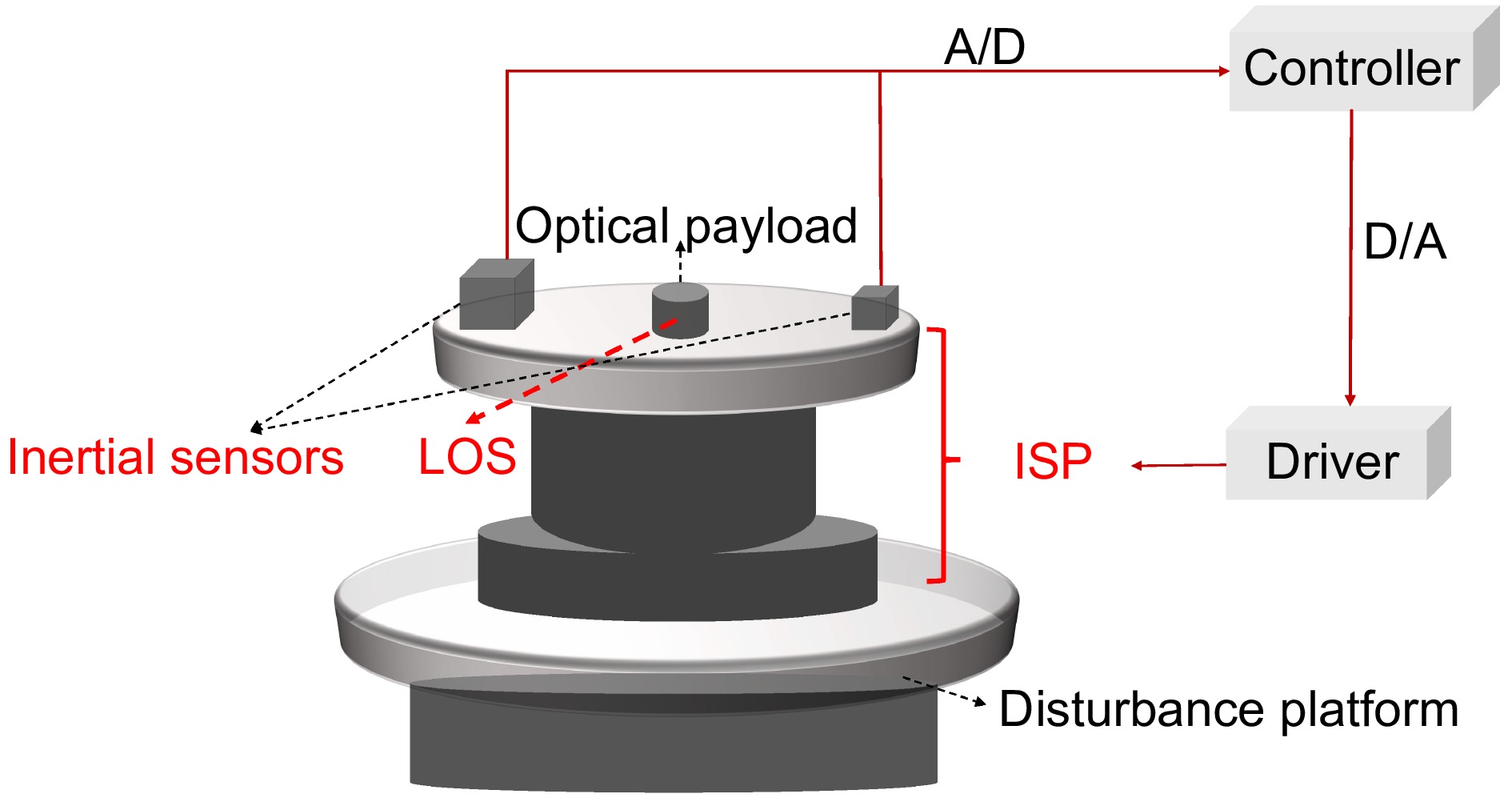
Overview: Inertially stabilized platforms (ISPs) are the servo systems used to isolate disturbances and point to targets, which are currently widely utilized in fields such as aerial remote sensing, optoelectronic tracking, and target recognition. However, ISPs are inevitably affected by disturbances caused by the movement/rotation/vibration of motion carriers, so disturbance suppression has become an urgent problem for ISPs to solve. At present, the mainstream method of ISP disturbance suppression is feedback control combined with other control algorithms, such as feedforward control, sliding mode control (SMC), active disturbance rejection control (ADRC), fuzzy control, etc. However, these methods have problems, such as the need for additional sensors, the introduction of chattering, and the need for many parameters. The error observer is designed by optimizing the sensitivity function based on error observation, which enables the system to have strong low-frequency disturbance rejection capability. Nevertheless, the stability condition limits the error observer bandwidth, so the frequency range of disturbance rejection is not high. As an active disturbance rejection method, disturbance observer (DOB) is widely adopted. Due to the limited bandwidth of traditional DOB, current researches on DOB are mostly focused on improving the structure and thus enhancing the transfer function characteristic. So, a saturation module is introduced into the acceleration disturbance observer. According to the stability condition, the filter bandwidth is increased by adjusting the saturation limit threshold. This allows the observer to sacrifice some low-frequency suppression effects while increasing the suppression of medium- and high-frequency disturbances. Therefore, a dual observer is proposed without compromising stability, which combines the error observer and the saturated acceleration disturbance observer within a single loop to achieve wide-band disturbance suppression. The interaction between the two observers is also analyzed. The existence of the error observer depresses the saturation threshold. If the saturation observer wants to increase the threshold, the error observer bandwidth needs to reduce. The two complement each other and restrict each other. In addition, the disturbance suppression capability of dual observers under different observer parameter selections is analyzed to provide more options for various application scenarios. The experimental results show that the dual observer combines the advantages of both and improves the system's closed-loop performance under both single-frequency and mixed-frequency disturbances. At the same time, the experimental results also confirm the restrictive relationship between the two observers.
-

-
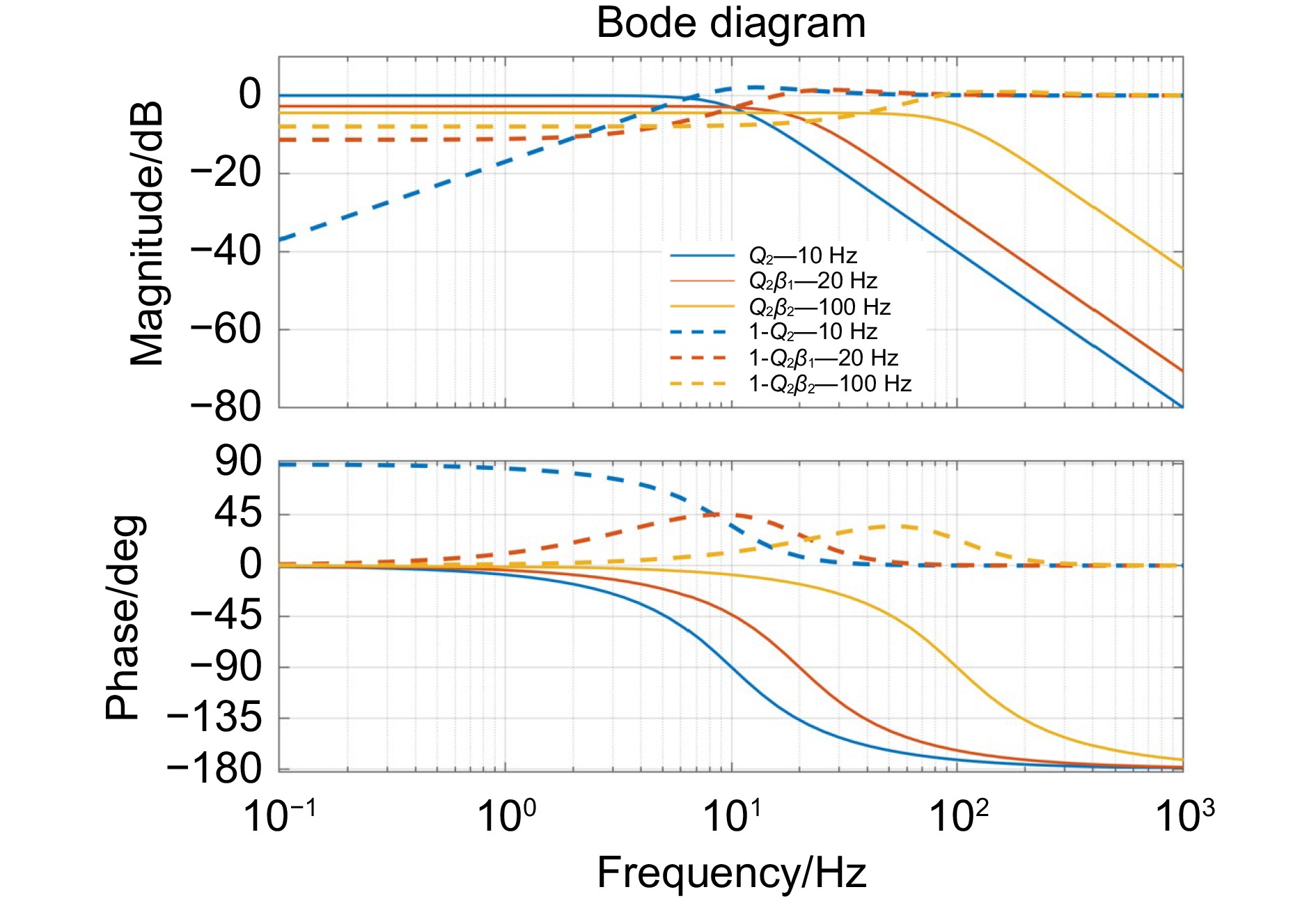
图 5 不同带宽的Q以及对应1-Q的Bode图
Figure 5. Bode plots of Q with different bandwidths and corresponding 1-Q
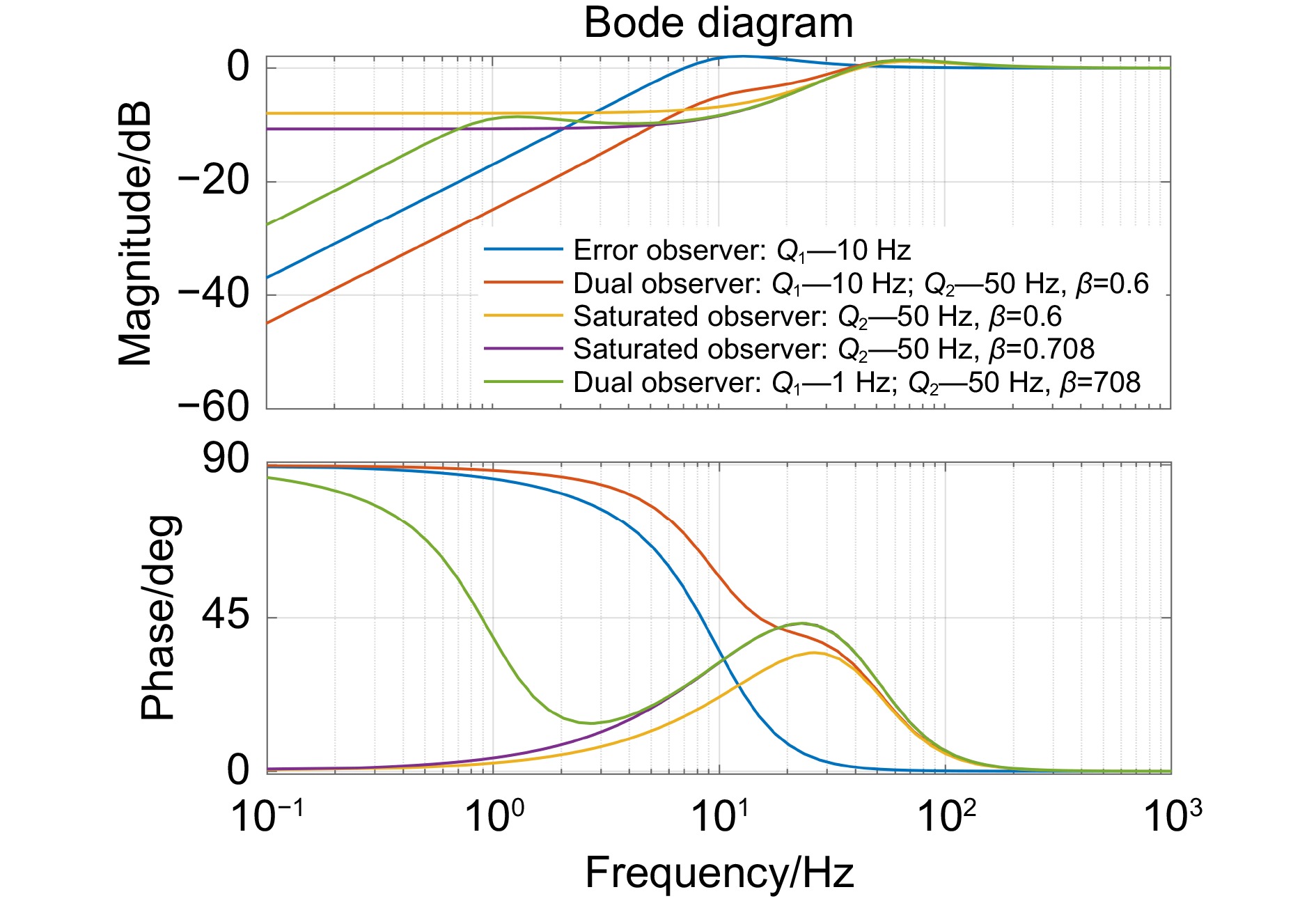
图 7 不同观测器扰动抑制性能Bode图
Figure 7. Disturbance rejection performance of different observers' Bode diagram
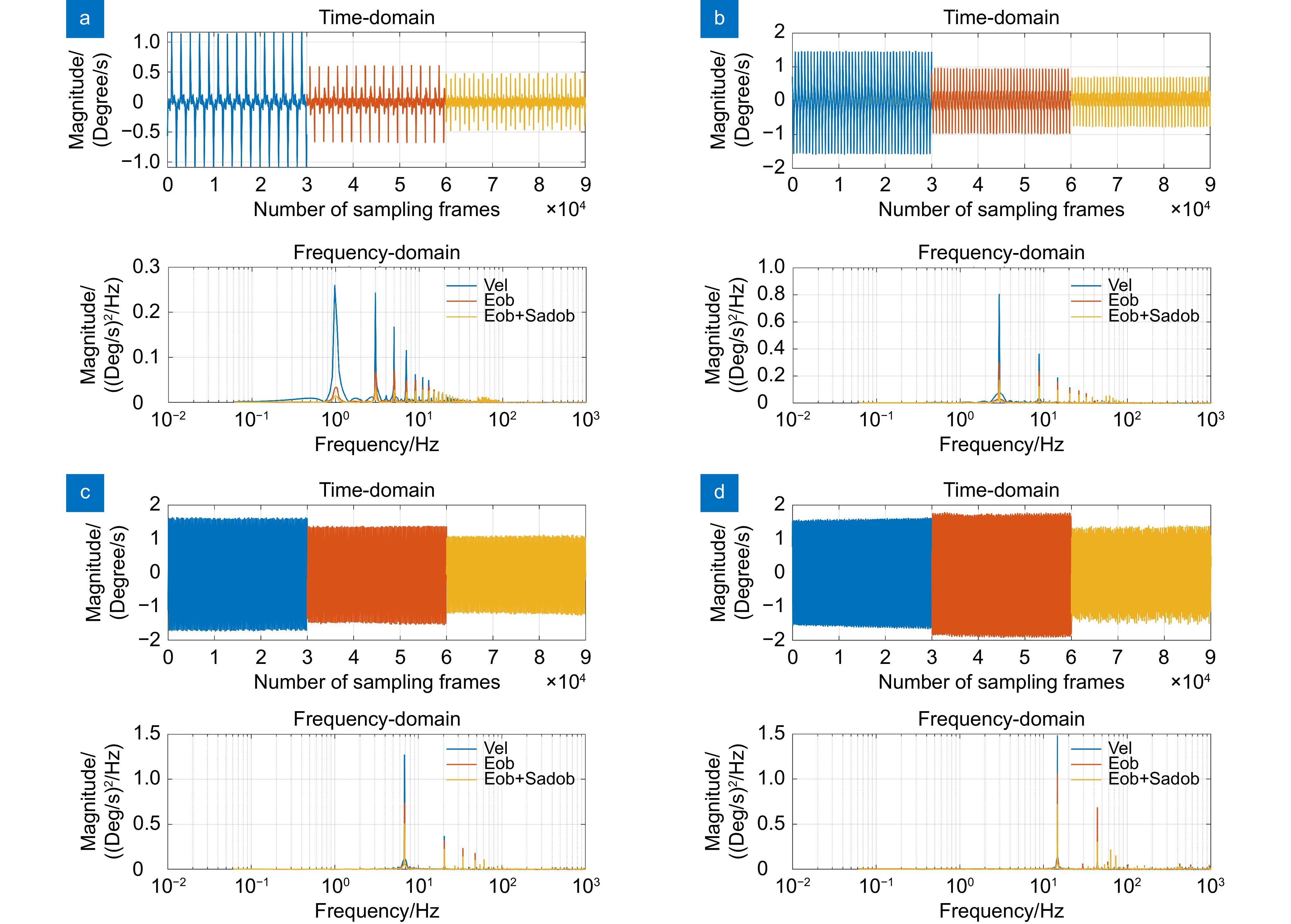
图 9 单频扰动下不同方法的角速度误差。(a) 1 Hz;(b) 3 Hz;(c) 7 Hz;(d) 15 Hz
Figure 9. Angular velocity error of different methods under single-frequency disturbance. (a) 1 Hz; (b) 3 Hz; (c) 7 Hz; (d) 15 Hz
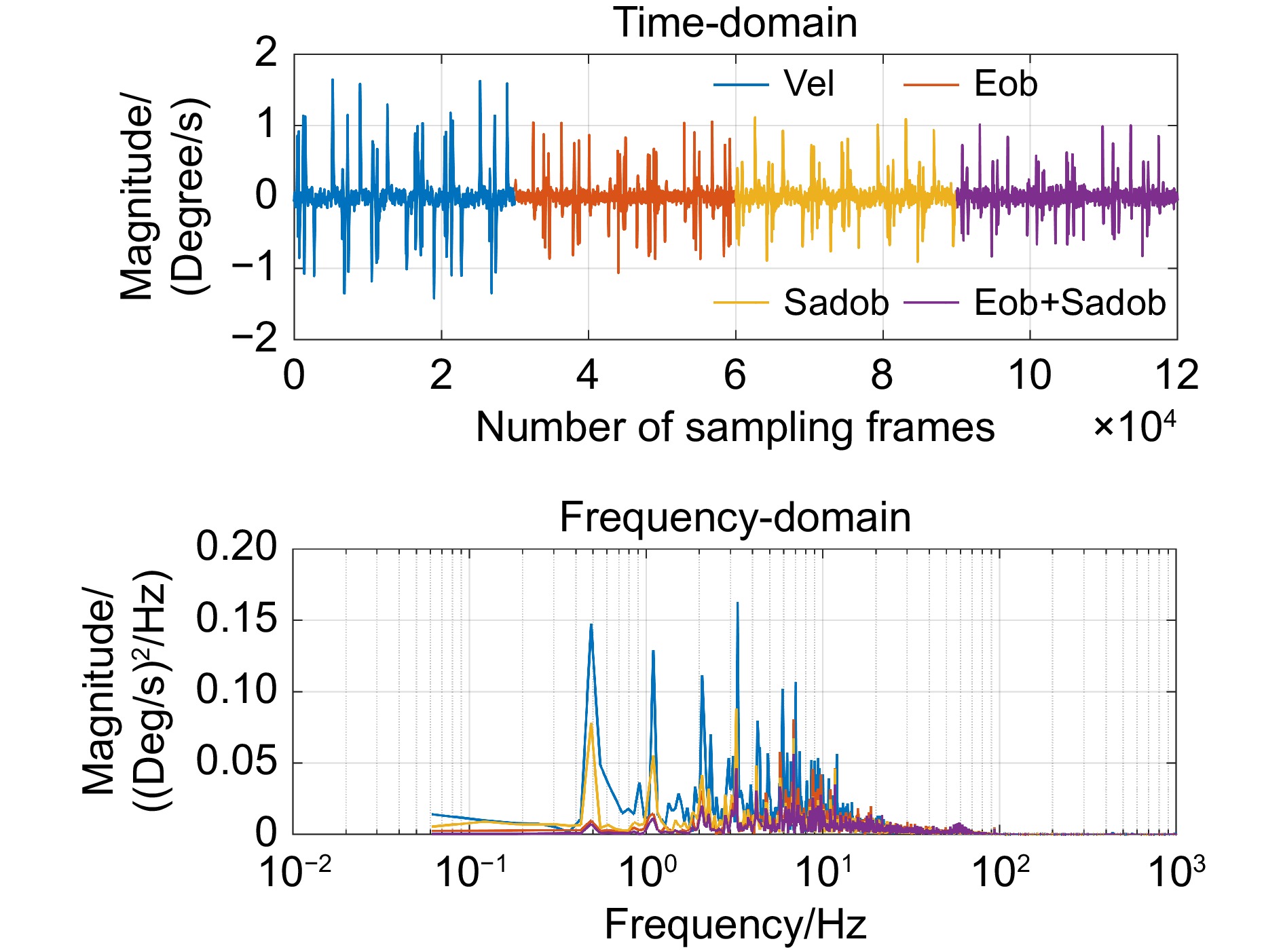
图 10 混频扰动下不同方法的角速度误差
Figure 10. Angular velocity error of different methods under mixed-frequency disturbance
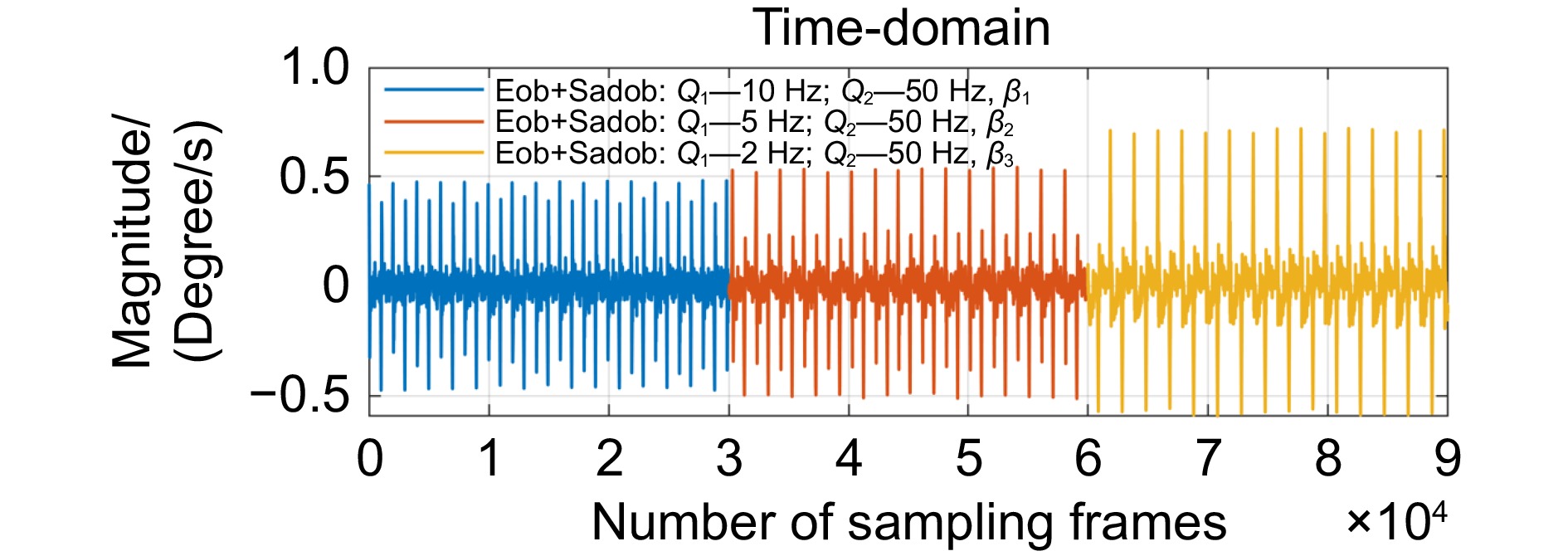
图 11 不同参数的双观测器角速度误差
Figure 11. Angular velocity error of dual observer with different parameters
表 1 不同单频扰动的闭环误差峰值(单位:(°)/s)
Table 1. Closed-loop error peak for different single-frequency disturbance (Unit: (°)/s)
Disturbance frequency/Hz Vel Eob Eob+Sadob 1 1.17 0.67 0.48 3 1.58 0.98 0.77 7 1.73 1.54 1.26 15 1.66 1.92 1.52  下载: 导出CSV
下载: 导出CSV
-
参考文献
[1] Hilkert J M. Inertially stabilized platform technology concepts and principles[J]. IEEE Control Syst Mag, 2008, 28(1): 26−46. doi: 10.1109/MCS.2007.910256
[2] Masten M K. Inertially stabilized platforms for optical imaging systems[J]. IEEE Control Syst Mag, 2008, 28(1): 47−64. doi: 10.1109/MCS.2007.910201
[3] 王玉, 边启慧, 廖军, 等. 惯性稳定万向架中基于SBG惯导的捷联控制技术[J]. 光电工程, 2023, 50(5): 220238. doi: 10.12086/oee.2023.220238
Wang Y, Bian Q H, Liao J, et al. Strapdown inertial stabilization technology based on SBG inertial navigation in inertial stabilization gimbal[J]. Opto-Electron Eng, 2023, 50(5): 220238. doi: 10.12086/oee.2023.220238
[4] Lin Z C, Liu K, Zhang W. Inertially stabilized platform for airborne remote sensing using magnetic bearings[J]. IEEE/ASME Trans Mechatron, 2016, 21(1): 288−301. doi: 10.1109/TMECH.2015.2451137
[5] Xiang B, Wong W. Suspension characteristics of magnetically suspended frame in inertially stabilized platform[C]//Proceedings of 2018 IEEE 18th International Power Electronics and Motion Control Conference, 2018: 776–783. https://doi.org/10.1109/EPEPEMC.2018.8521921.
[6] Wang Y, Bian Q H, Tang T, et al. Gyro feedforward control of an IMU-based inertial stabilization gimbal[C]//Proceedings of 2023-49th Annual Conference of the IEEE Industrial Electronics Society, 2023: 1–8. https://doi.org/10.1109/IECON51785.2023.10312075.
[7] Wang C, Peng J D, Pan J F. A novel friction compensation method based on stribeck model with fuzzy filter for PMSM servo systems[J]. IEEE Trans Ind Electron, 2023, 70(12): 12124−12133. doi: 10.1109/TIE.2022.3232667
[8] Jamaludin Z, van Brussel H, Swevers J. Friction compensation of an XY feed table using friction-model-based feedforward and an inverse-model-based disturbance observer[J]. IEEE Trans Ind Electron, 2009, 56(10): 3848−3853. doi: 10.1109/TIE.2009.2017560
[9] 周向阳, 赵蓓蕾. 惯性稳定平台扩张状态观测器/PD复合控制[J]. 中国惯性技术学报, 2017, 25(1): 6−10. doi: 10.13695/j.cnki.12-1222/o3.2017.01.002
Zhou X Y, Zhao B L. Extended state observer/PID compound control for inertially stabilized platform[J]. J Chin Inertial Technol, 2017, 25(1): 6−10. doi: 10.13695/j.cnki.12-1222/o3.2017.01.002
[10] 周向阳, 时延君. 惯性稳定平台单神经元/PID自适应复合控制与参数优化[J]. 仪器仪表学报, 2019, 40(11): 189−196. doi: 10.19650/j.cnki.cjsi.j1905406
Zhou X Y, Shi Y J. Single neuron/PID adaptive compound control and parameter optimization for the inertially stabilized platform[J]. Chin J Sci Instrum, 2019, 40(11): 189−196. doi: 10.19650/j.cnki.cjsi.j1905406
[11] 周向阳, 舒通通, 吕子豪, 等. 基于模糊切换增益调节的惯性稳定平台滑模控制[J]. 仪器仪表学报, 2021, 42(12): 263−271. doi: 10.19650/j.cnki.cjsi.J2108370
Zhou X Y, Shu T T, Lyu Z H, et al. Sliding mode control of inertially stabilized platform based on fuzzy switching gain adjustment[J]. Chin J Sci Instrum, 2021, 42(12): 263−271. doi: 10.19650/j.cnki.cjsi.J2108370
[12] Ruan Y, Xu T R, Liu Y, et al. Error-based observation control of an image-based control loop for disturbance suppression in segmented lightweight large-scaled diffractive telescope (SLLDT)[J]. Opt Lasers Eng, 2022, 156: 107105. doi: 10.1016/j.optlaseng.2022.107105
[13] Wu Z H, Zhou H C, Deng F Q, et al. Disturbance observer-based boundary control for an antistable stochastic heat equation with unknown disturbance[J]. IEEE Trans Automat Contr, 2023, 68(6): 3604−3611. doi: 10.1109/TAC.2022.3191390
[14] Fang S H, He Y T, Wan P, et al. Low-speed control of arc motor using Kalman observer via acceleration-based disturbance observer[J]. IEEE Trans Power Electron, 2024, 39(1): 1254−1268. doi: 10.1109/TPEL.2023.3322863
[15] Yun J N, Su J B. Design of a disturbance observer for a two-link manipulator with flexible joints[J]. IEEE Trans Control Syst Technol, 2014, 22(2): 809−815. doi: 10.1109/TCST.2013.2248733
[16] Deng J Q, Zhou X, Mao Y. On vibration rejection of nonminimum-phase long-distance laser pointing system with compensatory disturbance observer[J]. Mechatronics, 2021, 74: 102490. doi: 10.1016/j.mechatronics.2021.102490
[17] Muramatsu H, Katsura S. An adaptive periodic-disturbance observer for periodic-disturbance suppression[J]. IEEE Trans Ind Inf, 2018, 14(10): 4446−4456. doi: 10.1109/TII.2018.2804338
[18] Yu Z Y, Tang T. Limited amplitude-disturbance observer control for backlash-containing electromechanical system[J]. IEEE Trans Ind Electron, 2024, 71(6): 5960−5971. doi: 10.1109/TIE.2023.3290240
[19] Back J, Shim H. Adding robustness to nominal output-feedback controllers for uncertain nonlinear systems: a nonlinear version of disturbance observer[J]. Automatica, 2008, 44(10): 2528−2537. doi: 10.1016/j.automatica.2008.02.024
[20] Alizadeh M, Moghaddam M M, HosseinNia S H. A novel zero delay low pass filter: application to precision positioning systems[J]. ISA Trans, 2021, 111: 231−248. doi: 10.1016/j.isatra.2020.11.013
[21] 邓超. 运动平台预测跟踪技术研究[D]. 成都: 中国科学院大学(中国科学院光电技术研究所), 2018: 1–153.
Deng C. Research on prediction tracking control on moving bed[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2018: 1–153.
-
访问统计
 点击扫一扫
点击扫一扫
图(12)
表(1)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


