
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要
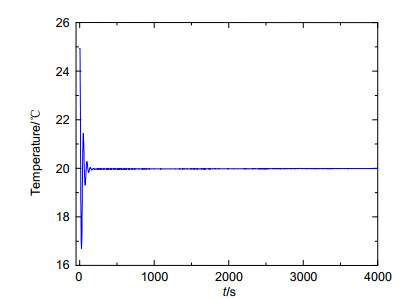
多线列激光雷达具有广泛的需求,而现在的激光雷达探测处理电路多采用分立元器件组成,且探测器与处理电路相分离,存在体积大、成本高、可靠性差等问题。针对上述问题,本文基于系统级封装技术,设计了一种集成化的16元激光雷达模拟前端微组件,对多元激光雷达微组件的研究具有重要的现实意义。该组件集成了16元线列雪崩光电二极管探测器、自研的多通道激光雷达模拟前端读出电路芯片、温度传感器和半导体制冷器等,实现了探测、处理和温控一体化。测试表明,微组件的恒温稳定性为0.07 ℃,其带宽可达190 MHz,集成化微组件的噪声水平相比非集成化组件降低了32%以上,实现了对5 ns激光窄脉冲的高速探测。
Abstract
Multi-line LiDAR has a wide range of application demands, but the current detection and processing circuit of LiDAR is mostly composed of discrete components, and the detector is separated from the processing circuit, which brings high cost, poor reliability, and other problems. To solve the above problems, an integrated 16-element LiDAR analog front-end micromodule based on system-in-package technology is proposed, which has important practical significance for the research of multi-component LiDAR micromodule. This module integrates a 16-element avalanche photon diode array detector, a self-developed multi-channel LiDAR analog front-end readout circuit chip, a temperature sensor, and a thermoelectric cooler, etc., which can realize the integration of detection, processing and temperature control. The test results show that the thermostatic stability of the micromodule is 0.07 ℃, the bandwidth of the micromodule is up to 190 MHz, the noise level of the integrated micromodule is reduced by more than 32% compared with that of the non-integrated micromodule, and high speed detection of 5 ns laser narrow pulse is realized.
-
Key words:
- LiDAR /
- APD array /
- integration /
- micromodule
-
Overview
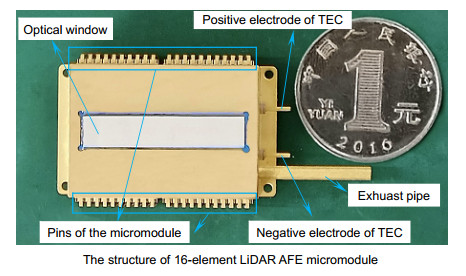
Overview: LiDAR is an environmental sensing system based on laser ranging technology. Compared with the visual imaging system, it can directly obtain the 3D information of the targets, so as to improve the accuracy of rapid detection and recognition for the targets. LiDAR is widely used in autonomous driving, robotics, unmanned aerial vehicles, topographic mapping, meteorological monitoring and other fields. At present, the detection and processing circuit of LiDAR is mostly composed of discrete components, and the detector is separated from the processing circuit, which brings high cost, poor reliability, and other problems. To solve the above problems, an integrated 16-element LiDAR analog front-end micromodule based on system-in-package (SIP) technology is proposed, which has important practical significance for the research of multi-element LiDAR micromodule. This module integrates a 16-element APD array detector, a self-developed multi-channel LiDAR analog front-end readout integrated circuit (AFE ROIC) chip, a temperature sensor, and a thermoelectric cooler (TEC), etc., which can realize the integration of detection, processing, and temperature control. The substrate, 905 nm narrow-band filter parameter and vacuum tube are designed, and micromodule integration is completed. The integrated multi-channel AFE ROIC chip features with 200 MHz bandwidth, four adjustable gains of 65 dB, 80 dB, 90 dB and 100 dB. The size of the integrated ROIC is 2.5 mm ×2.0 mm. Compared with the multi-channel AFE readout circuit composed of discrete components, the integrated circuit chip is helpful to realize integration. Considering the heat dissipation of the chip and signal integrity, the aluminum substrate PCB with high thermal conductivity is adopted and the PCB routing is optimized. Considering that the wavelength of 905 nm semiconductor laser diode will drift due to the influence of temperature, the parameters of the filter are optimized. The vacuum shell adopts metal wall and ceramic insulator structure with excellent air tightness and reliability. The whole shell is composed of metal base, metal wall, ceramic insulation structure, double straight insert pins, copper exhaust pipe and top cover with a window. The installation position of the TEC is designed inside the shell. The TEC is a solid device without noise and vibration. It can realize cooling by passing positive current and heating by passing negative current. Therefore, the TEC can be controlled by an external TEC drive circuit to achieve a constant temperature inside the shell. An experiment is built to test the performance parameters of the 16-element LiDAR AFE micromodule such as the noise level and the response capability of laser pulse echoes. The thermostatic stability of the micromodule is 0.07 ℃, the bandwidth of the micromodule is up to 190 MHz, the noise level of the integrated micromodule is reduced by more than 32% compared with that of the non-integrated micromodule, and high speed detection of 5 ns laser narrow pulse is realized.
-

-
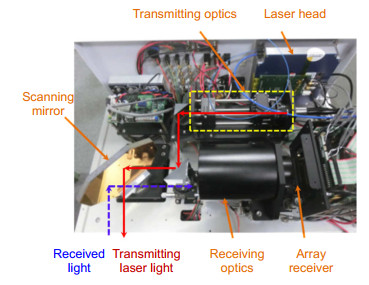
图 2 日本三菱电机公司的雷达样机
Figure 2. The prototype LiDAR of Mitsubishi Electric Corporation of Japan
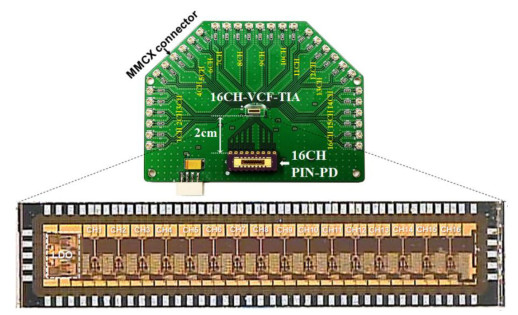
图 4 哈尔滨大学的阵列激光雷达模拟前端组件
Figure 4. Array LiDAR analog front end module of Harbin University
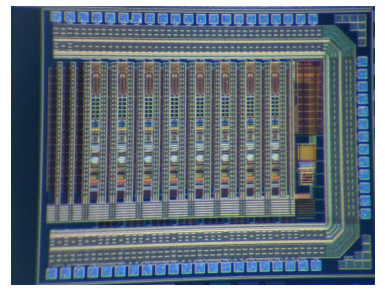
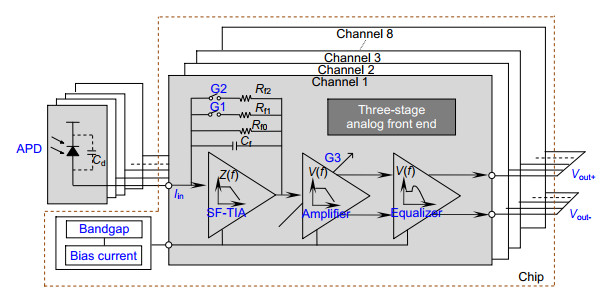
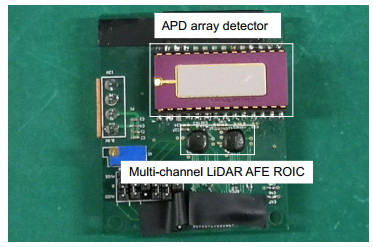
图 9 多通道激光雷达模拟前端读出电路芯片实物图
Figure 9. Actual chip picture of Multi-channel LiDAR AFE ROIC
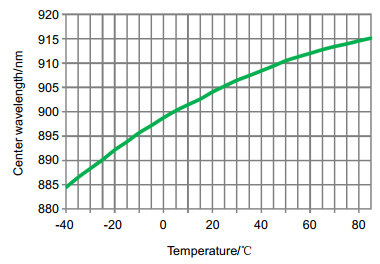
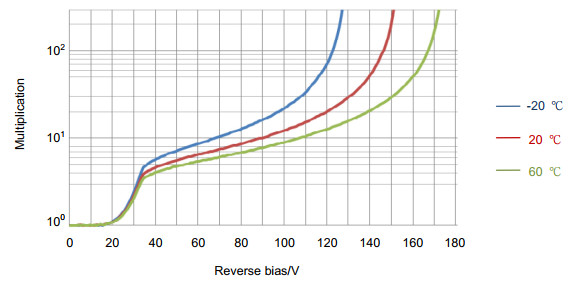
图 10 激光器的中心波长的温漂特性
Figure 10. The temperature drift characteristic of the central wavelength of the laser
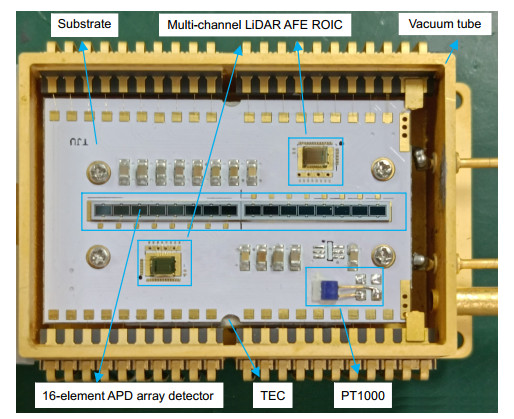
图 13 16元激光雷达模拟前端微组件内部结构
Figure 13. The internal structure of 16-element LiDAR AFE micromodule

图 14 16元激光雷达模拟前端微组件外部结构
Figure 14. The external structure of 16-element LiDAR AFE micromodule
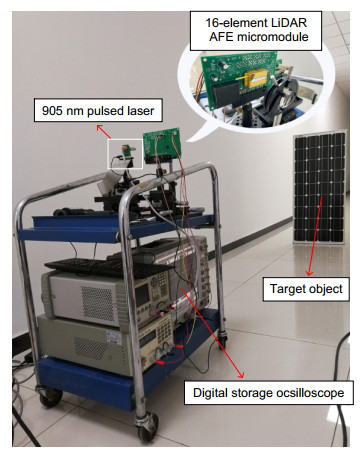
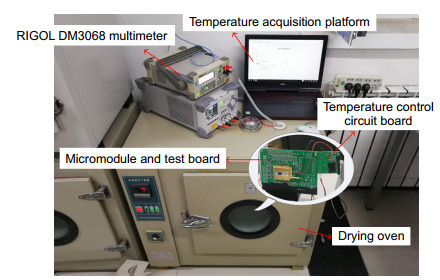
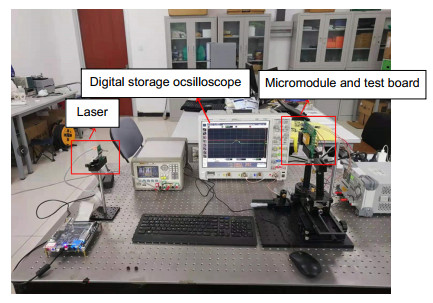
图 18 16元激光雷达模拟前端微组件测试环境
Figure 18. Test environment of 16-elemen LiDAR AFE micromodule

图 19 16元激光雷达模拟前端微组件的激光脉冲响应
Figure 19. Laser impulse response of 16-element LiDAR AFE micromodule
表 1 微组件的整体带宽
Table 1. The overall bandwidth of the micromodule
Gain/dB Bandwidth/MHz 65 195 80 190 90 190 100 190  下载: 导出CSV
下载: 导出CSV
表 2 两种组件的RMS噪声的对比
Table 2. Comparison of the RMS noise between the two module
Gain of ROIC/dB RMS of integrated module/mV RMS of unintegrated module/mV 65 1.22 2.47 80 1.48 2.18 90 4.39 7.45 100 12.26 21.97
下载: 导出CSV
表 3 16通道的归一化脉冲幅度
Table 3. Normalized pulse amplitude of 16 channels
Channel 1 2 3 4 5 6 7 8 Amplitude 0.93 0.94 0.98 0.97 0.93 0.92 0.92 0.93 Channel 9 10 11 12 13 14 15 16 Amplitude 0.96 1 0.96 1 0.94 0.92 0.93 0.93
下载: 导出CSV
-
参考文献
[1] Zhu F H, Gong K, Huo Y J. A wide dynamic range laser rangefinder with cm-level resolution based on AGC amplifier structure[J]. Infrared Phys Technol, 2012, 55(2-3): 210-215. doi: 10.1016/j.infrared.2012.01.003
[2] Castorena J, Creusere C D. Sampling of time-resolved full-waveform LIDAR signals at Sub-Nyquist rates[J]. IEEE Trans Geosci Remote Sens, 2015, 53(7): 3791-3802. doi: 10.1109/TGRS.2014.2383839
[3] Allouis T, Bailly J S, Pastol Y, et al. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals[J]. Earth Surf Process Landforms, 2010, 35(6): 640-650. doi: 10.1002/esp.1959
[4] Duong H V, Lefsky M A, Ramond T, et al. The electronically steerable flash lidar: a full waveform scanning system for topographic and ecosystem structure applications[J]. IEEE Trans Geosci Remote Sens, 2012, 50(11): 4809-4820. doi: 10.1109/TGRS.2012.2193588
[5] 李杰. 脉冲激光雷达全波形建模与处理算法研究[D]. 天津: 天津大学, 2018: 1-4.
Li J. Study on the modeling and processing algorithm of the full waveform of pulsed lidar[D]. Tianjin: Tianjin University, 2018: 1-4.
[6] 郑浩. 成像激光雷达接收器模拟前端集成电路与系统研究[D]. 西安: 西安电子科技大学, 2018: 4.
Zheng H. Key technology research on analog front end integrated circuit and system for imaging LADAR receiver[D]. Xi'an: Xidian University, 2018: 4.
[7] Fersch T, Weigel R, Kölpin A. Comparison of laser safe scanning patterns for second generation LiDAR deflection units[C]//201718th International Radar Symposium, Prague, Czech Republic, 2017: 1-9.
[8] Ta T T, Kubota H, Kokubun K, et al. A 2D-SPAD array and read-out AFE for next-generation solid-state LiDAR[C]//2020 IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 2020: 1-2.
[9] 朱孟真, 程勇, 谭朝勇, 等. 国外空间激光的发展现状[J]. 红外与激光工程, 2012, 41(12): 3241-3248. doi: 10.3969/j.issn.1007-2276.2012.12.020
Zhu M Z, Cheng Y, Tan C Y, et al. Development of foreign spaceborne laser[J]. Infrared Laser Eng, 2012, 41(12): 3241-3248. doi: 10.3969/j.issn.1007-2276.2012.12.020
[10] Albota M A, Heinrichs R M, Kocher D G, et al. Three-dimensional imaging laser radar with a photon-counting avalanche photodiode array and microchip laser[J]. Appl Opt, 2002, 41(36): 7671-7678. doi: 10.1364/AO.41.007671
[11] Kameyama S, Hirai A, Imaki M, et al. Demonstration on range imaging of 256×256 pixels and 30 frames per second using short wavelength infrared pulsed time-of-flight laser sensor with linear array receiver[J]. Opt Eng, 2016, 56(3): 031214. doi: 10.1117/1.OE.56.3.031214
[12] Hong C, Kim S H, Kim J H, et al. A Linear-Mode LiDAR sensor using a Multi-Channel CMOS transimpedance amplifier array[J]. IEEE Sens J, 2018, 18(17): 7032-7040. doi: 10.1109/JSEN.2018.2852794
[13] Ying G, Huang G H, Shu R. 3D imaging laser radar using Geiger-mode APDs: analysis and experiments[J]. Proc SPIE, 2010, 7684: 768402. doi: 10.1117/12.849222
[14] 朱静浩. 阵列APD无扫描激光雷达非均匀性的分析与实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2013: 47-59.
Zhu J H. Analysis and experimental research on non-uniformity of non-scanning Ladad based on APD arrays[D]. Harbin: Harbin Institute of Technology, 2013: 47-59.
[15] Zhou G Q, Zhou X, Yang J Z, et al. Flash Lidar sensor using fiber-coupled APDs[J]. IEEE Sens J, 2015, 15(9): 4758-4768. doi: 10.1109/JSEN.2015.2425414
[16] 胡凯. 基于InGaAs面阵探测器的FM/cw激光雷达读出电路的设计技术研究[D]. 天津: 天津大学, 2017: 113-122.
Hu K. Research on ROIC design technique for FM/cw LADAR based on InGaAs FPA detectors[D]. Tianjin: Tianjin University, 2017: 113-122.
[17] Hu K, Zhao Y Q, Ye M, et al. Design of a CMOS ROIC for InGaAs self-mixing detectors used in FM/cw LADAR[J]. IEEE Sens J, 2017, 17(17): 5547-5557. doi: 10.1109/JSEN.2017.2724064
[18] Crowell C R. Temperature dependence of avalanche multiplication in semiconductors[J]. Applied Physics Letters, 1966, ED-13(6): 242-244. doi: 10.1063/1.1754731
[19] Zhang Z Y, Yu D S, Cai Y, et al. Design of APD double temperature compensation circuit with high gain stability[J]. Proc SPIE, 2018, 10846: 108460Z. doi: 10.1117/12.2504223
[20] Prokes A, Zerman V. Temperature compensation of the responsivity of avalanche photodiodes in free-space optical communication systems[C]//IEEE/Siberian Conference on Control and Communications, Tomsk, Russia, 2003: 102-107.
[21] Bogatin E. 信号完整性与电源完整性分析[M]. 李玉山, 刘洋, 等, 译. 2版. 北京: 电子工业出版社, 2015: 72-78.
Bogatin E. Signal and Power Integrity: Simplified[M]. Li Y S, Liu Y, et al., trans. 2nd ed. Beijing: Publishing House of Electronics Industry, 2015: 72-78.
[22] 郑学仁, 李斌. 系统级封装技术综述[J]. 半导体技术, 2002, 27(8): 17-20, 34. doi: 10.3969/j.issn.1003-353X.2002.08.006
[23] Tumati R. Solid-state nanopore characterization and low noise transimpedance amplifier for nanopore-based gene sequencer[D]. Maine: The University of Maine, 2008: 26-35.
[24] Prokeš A. Influence of temperature variation on optical receiver sensitivity and its compensation[J]. Radioengineering, 2007, 16(3): 13-18.
[25] Chuah J H, Holburn D. Low-noise transimpedance amplifier for pixelated CMOS photon detector in the scanning electron microscope[J]. IETE J Res, 2013, 59(3): 226-230. doi: 10.4103/0377-2063.116082
-
访问统计


 点击扫一扫
点击扫一扫

图(21)
表(3)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


