
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要
光子计数激光雷达因其极高的探测灵敏度在远距离目标探测领域有着非常重要的作用。针对远距离、高速度的目标,普通的光子计数激光雷达无法简单通过统计直方图获得有用的回波信息。为了解决这一问题,本文提出了一种基于宏/子脉冲编码的光子计数激光雷达,利用时移脉冲累加的方法提取子脉冲的飞行时间进而在一个宏脉冲内获得目标距离信息。建立了宏/子脉冲编码光子计数激光雷达的理论模型,对虚警概率和探测概率的影响进行了分析,并通过蒙特卡洛仿真和实验验证了其对远距离高速径向运动目标探测的有效性。
Abstract
Photon counting LiDAR plays an important role in the long-distance target measurement because of the high detection sensitivity. For the targets with high radial velocity and long distance, ordinary photon counting LiDAR could not recover the useful echo information simply by statistical histogram. In order to solve this problem, a method based on macro/sub-pulse coded photon counting LiDAR is proposed. The flight time of the subpulses is extracted by time shift pulse accumulation and the target distance information is obtained in one macro pulse. In this paper, the theoretical model of macro/sub-pulse coded photon counting LiDAR is established, and the influence of false alarm probability and detection probability is analyzed. The effectiveness of the LiDAR is verified by Monte Carlo simulation and actual experiments.
-
Key words:
- macro/sub-pulse /
- LiDAR /
- photon counting /
- target measurement
-
Overview

Overview: The photon counting LiDAR plays an important role in the long distance measurement because of the high sensitivity to a single photon and the ability of providing accurate photon arrival time. It uses statistical sampling technology which needs to accumulate enough photon events to establish a statistical histogram and extract echo information through the histogram. However, the process will greatly reduce the measurement speed of the system. If there is a relative movement between the system and target, the laser pulses of multiple cycles will have different flight time. Then it can be difficult to extract the distance of the target as the echo signals are difficult to reflect the clustering characteristics in time. In order to solve this problem, a macro/sub-pulse coded photon counting LiDAR is proposed. The measurement speed of the macro/sub-pulse method is determined by the total time of all sub-pulses in the period. Compared with pulse accumulation, the macro/sub-pulse method can realize fast measurement. In the system, the emitting pulse is divided into two parts by a proportional beam splitter, one part is directly detected by PIN and used as the transmitting reference signal, and the other part is used to detect targets. Echo signals scattered by the target are received by optical system and detected by GM-APD (Geiger-mode avalanche photodiode). It should be pointed out that in the macro/sub-pulse LiDAR system, any two sub-pulses have different pulse intervals, which can effectively avoid distance blur. In this paper, the theoretical model of macro/sub-pulse coded photon counting LiDAR is established. To obtain the distance of the target, a method which accumulates the sub-pulses with different time shift operations was proposed in this article. For the time-shifted pulse accumulation method, there is no special requirement for the received signal, but the sub-pulse interval of the transmitted signal needs to be known in advance. To meet this requirement, a PIN detector is used to record the transmitting sequence. Within a period, the echo signals detected by GM-APD detector are shifted sequentially according to the interval of sub-pulses, and the sequentially shifted echo signals are accumulated. The position of the cumulative peak corresponds to the flight time of the sub-pulse. Also, in the third part of this article, the influence of false alarm probability and detection probability were analyzed. The effectiveness of macro/sub-pulse coded photon counting LiDAR is verified by Monte Carlo simulation and experiment.
-

-
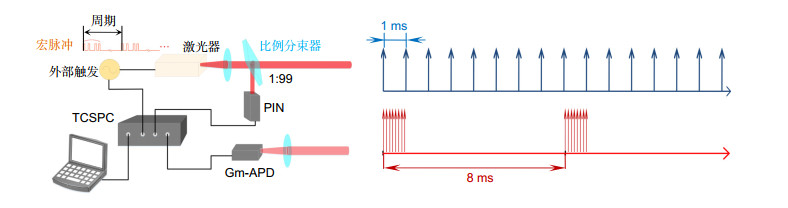
图 1 宏/子脉冲编码光子计数激光雷达系统结构
Figure 1. Structure of macro/sub-pulse coded photon counting LiDAR system
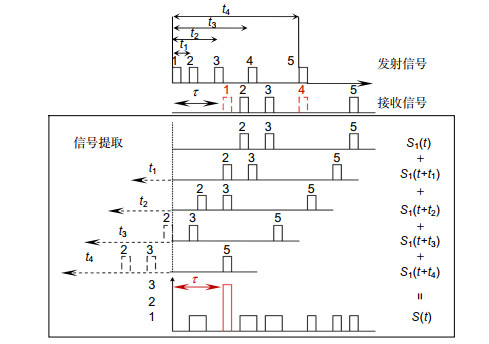
图 2 时移脉冲累加飞行时间提取方法
Figure 2. Time shift pulse accumulation flight time extraction method

图 3 在精时间门(a)和粗时间门(b)的情况下,目标运动对脉冲累加效果的影响
Figure 3. The effect of target motion on the pulse accumulation effect in the case of fine time gate (a) and coarse time gate (b)
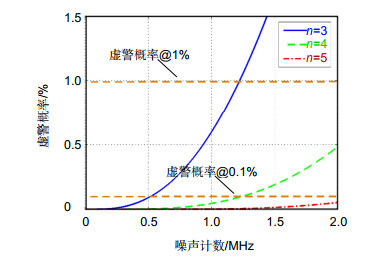
图 4 噪声水平对探测概率的影响(N=20, td=25 ns, tbin=20 ns)
Figure 4. Influence of noise level on detection probability (N=20, td=25 ns, tbin=20 ns)
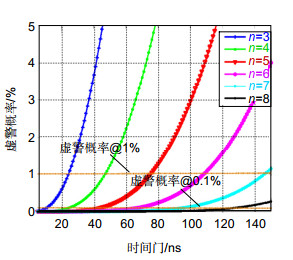
图 5 时间门宽度对虚警概率的影响(N=20, td=25 ns, ψn=1 Mcps)
Figure 5. Influence of time door width on the false alarm probability (N=20, td=25 ns, ψn=1 Mcps)
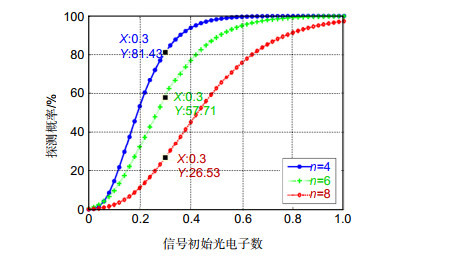
图 6 信号识别阈值对探测概率的影响(N=20, td=25 ns, ψn=1 Mcps)
Figure 6. Influence of signal recognition threshold on detection probability (N=20, td=25 ns, ψn=1 Mcps)
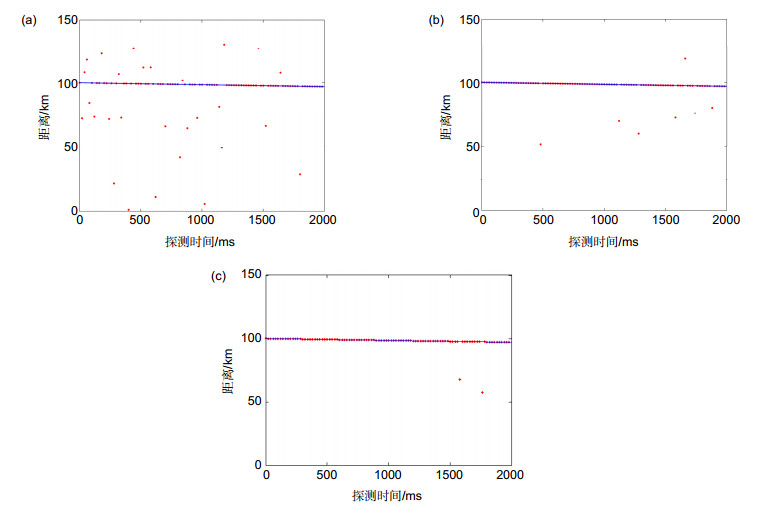
图 8 宏/子脉冲方法在不同回波信号强度下的探测仿真结果。(a)单脉冲探测概率30%;(b)单脉冲探测概率40%;(c)单脉冲探测概率50%
Figure 8. Detecting simulation of macro/sub-pulse method under different echo signal intensity. (a) Monopulse detection probability of 30%; (b) Monopulse detection probability of 40%; (c) Monopulse detection probability 50%
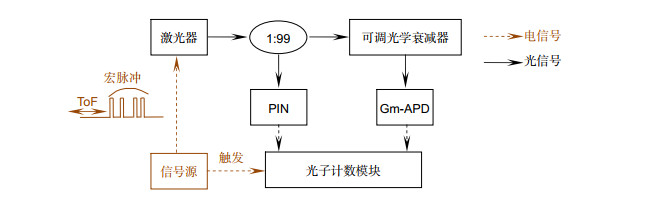
图 9 高速运动目标探测实验原理图
Figure 9. Experimental schematic diagram of high-speed moving target detection

图 10 等效远距离高速运动目标实验平台
Figure 10. Equivalent long-distance high-speed moving target experimental platform
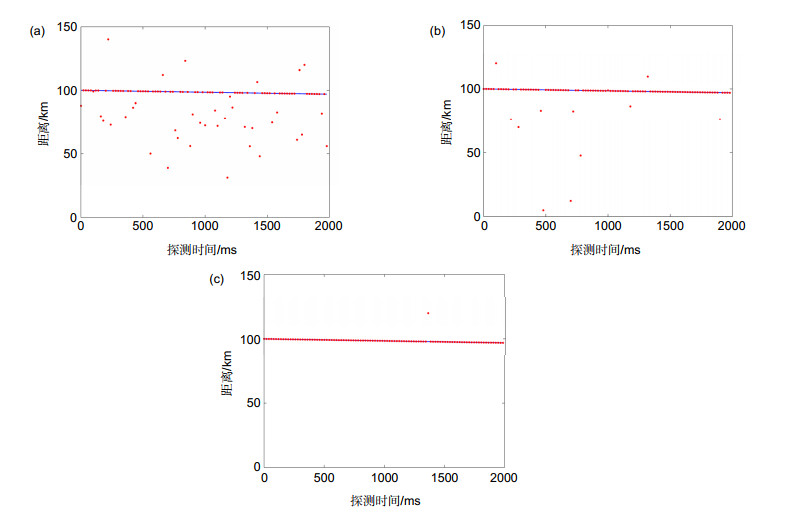
图 11 宏/子脉冲方法在不同回波信号强度下的探测实验结果。(a)单脉冲探测概率30%;(b)单脉冲探测概率40%;(c)单脉冲探测概率50%
Figure 11. Experimental results of macro/sub-pulse method under different echo signal intensity. (a) Monopulse detection probability of 30%; (b) Monopulse detection probability of 40%; (c) Monopulse detection probability of 50%
表 1 仿真实验的主要参数
Table 1. Main parameters of simulation experiment
参数 值 目标距离/km 100 脉冲宽度/ns 4 运动速度/(m/s) 1500 子脉冲个数 20 死时间长度/ns 25 平均噪声计数/Mcps 1 精时间门宽度/ns 0.1  下载: 导出CSV
下载: 导出CSV
表 2 宏/子脉冲方法探测概率仿真结果
Table 2. Simulation results of detection probability by macro/sub-pulse method
单脉冲探测概率/% 宏脉冲方法探测概率/% 1 2 3 4 5 均值 30 62 70 70 62 74 67.6 40 93 95 93 94 95 94.0 50 100 98 99 100 100 99.4
下载: 导出CSV
表 3 实验系统的主要参数
Table 3. Main parameters of the experimental system
参数 值 波长/nm 1064 目标距离/km 100 运动速度/(m/s) 1500 脉冲宽度/ns 4 死时间长度/ns 25 子脉冲个数 20 平均噪声计数/Mcps 1 精时间门宽度/ps 64
下载: 导出CSV
表 4 宏/子脉冲方法探测概率实验结果
Table 4. Experimental results of detection probability by macro/sub-pulse method
单脉冲探测概率/% 宏脉冲方法探测概率/% 1 2 3 4 5 均值 30 72.0 62.0 62.0 76.0 68.0 68.0 40 88.0 96.0 85.0 97.0 85.0 90.2 50 99.0 98.0 99.0 97.0 99.0 98.4
下载: 导出CSV
表 5 宏/子脉冲方法探测概率
Table 5. Detection probability of macro/sub-pulse method
单脉冲探测概率/% 宏脉冲方法探测概率/% 理论结果 仿真结果 实验结果 30 74.1 67.6 68.0 40 94.4 94.0 90.2 50 99.7 99.4 98.4
下载: 导出CSV
-
参考文献
[1] Albota M A, Aull B F, Fouche D G, et al. Three-dimensional imaging laser radars with Geiger-mode avalanche photodiode arrays[J]. Lincoln Laboratory Journal, 2002, 13(2): 351-370. http://www.researchgate.net/publication/250192756_Three-Dimensional_Imaging_Laser_Radars_with_Geiger-Mode_Avalanche_Photodiode_Arrays
[2] Warburton R E, McCarthy A, Wallace A M, et al. Subcentimeter depth resolution using a single-photon counting time-of-flight laser ranging system at 1550 nm wavelength[J]. Optics Letters, 2007, 32(15): 2266-2268. doi: 10.1364/OL.32.002266
[3] O'Brien M E, Fouche D G. Simulation of 3d laser radar systems[J]. Lincoln Laboratory Journal, 2005, 15(1): 37-60. http://www.researchgate.net/publication/284048398_Simulation_of_3D_laser_radar_systems
[4] Stone W C, Juberts M, Dagalakis N G, et al. Performance analysis of Next-Generation ladar for manufacturing, Construction, and Mobility[R]. NIST, 2007: 7112-7117.
[5] 刘博, 于洋, 姜朔.激光雷达探测及三维成像研究进展[J].光电工程, 2019, 46(7): 190167. doi: 10.12086/oee.2019.190167
Liu B, Yu Y, Jiang S. Review of advances in LiDAR detection and 3D imaging[J]. Opto-Electronic Engineering, 2019, 46(7): 190167. doi: 10.12086/oee.2019.190167
[6] Prochazka I, Kodet J, Blazej J, et al. Photon counting detector for space debris laser tracking and lunar laser ranging[J]. Advances in Space Research, 2014, 54(4): 755-758. http://smartsearch.nstl.gov.cn/paper_detail.html?id=79c1f21e77806e735bc46b2ca544f990
[7] Vacek M, Michalek V, Peca M, et al. Photon counting Lidar for deep space applications: concept and simulator[J]. Proceeding of SPIE, 2013, 8773: 877309. doi: 10.1117/12.2017398
[8] Markus T, Neumann T, Martino A, et al. The ice, cloud, and land elevation satellite-2 (ICESat-2): science requirements, concept, and implementation[J]. Remote Sensing of Environment, 2017, 190: 260-273. doi: 10.1016/j.rse.2016.12.029
[9] Liu B, Yu Y, Chen Z, et al. True random coded photon counting Lidar[J]. Opto-Electronic Advances, 2020, 3(2): 190044. doi: 10.29026/oea.2020.190044
[10] Mccarthy A, Collins R J, Krichel N J, et al. Long-range time-of-flight scanning sensor based on high-speed time-correlated single-photon counting[J]. Applied Optics, 2009, 48(32): 6241-6251. doi: 10.1364/AO.48.006241
[11] Du B C, Pang C K, Wu D, et al. High-speed photon-counting laser ranging for broad range of distances[J]. Scientific Reports, 2018, 8(1): 4198. doi: 10.1038/s41598-018-22675-1
[12] Liang M, Huang J H, Ren M, et al. 1550-nm time-of-flight ranging system employing laser with multiple repetition rates for reducing the range ambiguity[J]. Optics Express, 2014, 22(4): 4662-4670. doi: 10.1364/OE.22.004662
[13] Zhang Q, Soon H W, Tian H T, et al. Pseudo-random single photon counting for time-resolved optical measurement[J]. Optics Express, 2008, 16(17): 13233-13239. doi: 10.1364/OE.16.013233
[14] Zhang Q, Chen L, Chen N G, et al. Pseudo-random single photon counting: a high-speed implementation[J]. Biomedical Optics Express, 2010, 1(1): 41-46. doi: 10.1364/BOE.1.000041
[15] Takeuchi N, Sugimoto N, Baba H, et al. Random modulation CW Lidar[J]. Applied Optics, 1983, 22(9): 1382-1386. doi: 10.1364/AO.22.001382
[16] Hiskett P A, Parry C S, Mccarthy A, et al. A photon-counting time-of-flight ranging technique developed for the avoidance of range ambiguity at gigahertz clock rates[J]. Optics Express, 2008, 16(18): 13685-13698. doi: 10.1364/OE.16.013685
[17] Krichel N J, Mccarthy A, Buller G S. Resolving range ambiguity in a photon counting depth imager operating at kilometer distances[J]. Optics Express, 2010, 18(9): 9192-9206. doi: 10.1364/OE.18.009192
[18] Rieger P, Ullrich A. A novel range ambiguity resolution technique applying pulse-position modulation in time-of-flight ranging applications[J]. Proceedings of SPIE, 2012, 8389: 83790R. http://spie.org/x648.xml?product_id=919140
[19] Zhang Y F, He Y, Yang F, et al. Three-dimensional imaging Lidar system based on high speed pseudorandom modulation and photon counting[J]. Chinese Optics Letters, 2016, 14(11): 111101. doi: 10.3788/COL201614.111101
[20] Yang F, Zhang F, He F, et al. High speed pseudorandom modulation fiber laser ranging system[J]. Chinese Optics Letters, 2014, 12(8): 082801. doi: 10.3788/COL201412.082801
[21] Oh M S, Kong H J, Kim T M, et al. Reduction of range walk error in direct detection laser radar using a Geiger mode avalanche photodiode[J]. Optics Communications, 2010, 283(2): 304-308. doi: 10.1016/j.optcom.2009.10.009
[22] Gatt P, Johnson S, Nichols T, et al. Geiger-mode avalanche photodiode ladar receiver performance characteristics and detection statistics[J]. Applied Optics, 2009, 48(17): 3261-3276. doi: 10.1364/AO.48.003261
-
访问统计

 点击扫一扫
点击扫一扫
图(11)
表(5)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


