
 E-mail Alert
E-mail Alert RSS
RSS
Research on dynamic angle measurement method based on electro-optical servo platform
-
摘要:
针对动态角度测量的成本高及精度低的问题,提出一种基于非合作目标视觉跟踪的光电测量方法。利用安装在被测对象上的光电伺服平台搭载相机和激光测距仪对非合作目标进行实时跟踪和距离测量,根据伺服平台输出的精密角度、非合作目标距离和被测角度之间的转化关系计算出被测动态角度值。研制了基于光电伺服平台的动态角度测量装置,并对其进行了精度标定和误差分析。利用高精度旋转台模拟被测动态角度进行实验,验证了测量方法的可行性。实验结果表明在测量空间11.082 m范围内,测角误差在±0.09°以内。
 Abstract:
Abstract:Aiming at the measurement problem of high cost and low precision in dynamic angle, an electro-optical measurement method based on non-cooperative target vision tracking is presented. By using electro-optical servo platform mounted on the measured object to carry the camera and the laser rangefinder for the real time tracking and distance measurement of the non-cooperative target, the dynamic angle value is calculated according to the conversion relationship between the high precision angle of measurement of the servo system and the distance of the non-cooperative target. A dynamic angle measuring device is developed, and its precision calibration and error analysis are carried out. Using the high precision manual displacement table to simulate the measured dynamic angle to experiment, the feasibility of the measuring method is verified. The experimental results show that the measured angle error is 0.09° within the range of 11.082 m.
-
Key words:
- electro-optical measurement /
- large angle /
- dynamic measurement /
- non-cooperative target
-

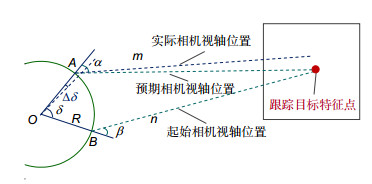
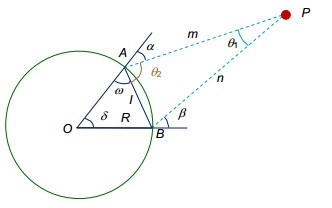
Overview: In the field of military and industrial production, it is often necessary to measure the dynamic corners of large rotating equipment. This type of rotating angle, which cannot be measured directly by angle measuring equipment, requires indirect measurement with the help of a sensor, and the measured angle is calculated according to the sensor data. Aiming at the problems of high measurement cost and low precision of dynamic angle measurement methods such as inertial measurement method, double theodolite measurement method, and three coordinate measurement method, an electro-optical measurement method based on non-cooperative target vision tracking is presented. Mathematical calculation model and dynamic compensation model for dynamic angle measurement are established. Using electro-optical servo platform mounted on the measured object to carry the camera and the laser rangefinder for the real time tracking and distance measurement of the non-cooperative target, the dynamic angle value is calculated according to the conversion relationship between the high precision angle of measurement of the servo system and the distance of the non-cooperative target and compensating the angle value according to the dynamic compensation model.
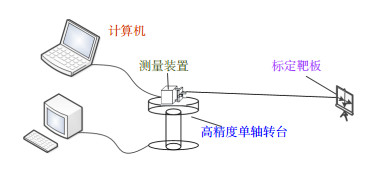
A dynamic angle measuring device is developed. The servo system structure adopts the azimuth and pitch double frame structure, the inner frame is the pitch channel, the outer frame is the azimuth channel, and the camera and the laser rangefinder are installed in the inner frame. The frame is driven directly by the permanent magnet synchronous motor, and the 16-bit rotary transformer is used as the angle measuring unit. Futhermore, its precision calibration and error analysis are carried out and accuracy of servo system up to 30" after calibration.
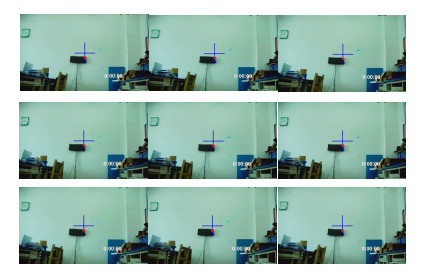
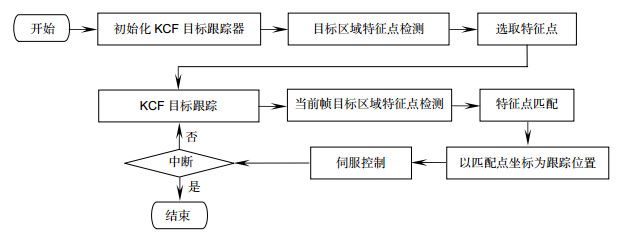
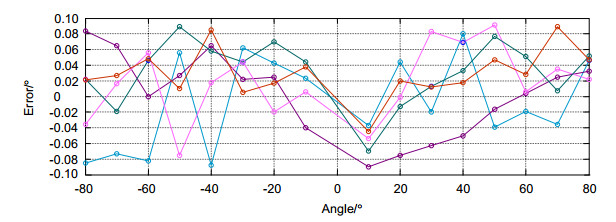
The servo control adopts the speed position double closed loop, using the instantaneous angular rate of the rate Gyro induction camera installed in the inner frame. This angular rate is regarded as the speed loop feedback, which make up of the closed loop with servo motor composition speed to isolate the disturbance of the carrier. Achieving stable tracking of non-cooperative goals, the non-cooperative target miss is used as the position ring input, and the spin angle is used as the feedback quantity to form the position closed loop. Using the high precision manual displacement table to simulate the measured dynamic angle, the feasibility of the measuring method is verified. The experimental results show that the measured angle error is 0.09° within the range of 11.082 m and angle measuring range reaches ±80°.
-

-
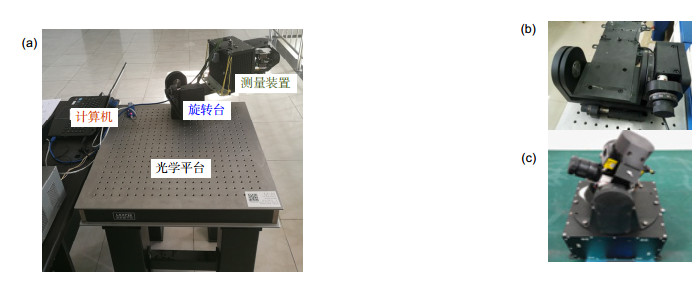
图 4 测量实物图。(a) 整体图;(b) 旋转台;(c) 测量装置
Figure 4. Physical diagram of measurement setup. (a) Overall diagram; (b) Rotary table; (c) Measuring device
-
[1] Peng G L, Sun Y, Han R, et al. A measuring method for large antenna assembly using laser and vision guiding technology[J]. Measurement, 2016, 92: 400–412. doi: 10.1016/j.measurement.2016.06.020
[2] Estler W T, Edmundson K L, Peggs G N, et al. Large-scale metrology – an update[J]. CIRP Annals, 2002, 51(2): 587–609. doi: 10.1016/S0007-8506(07)61702-8
[3] 陈志斌, 肖文健, 马东玺, 等.大尺寸空间角测量技术进展及其分析[J].应用光学, 2016, 37(3): 407–414. http://d.old.wanfangdata.com.cn/Periodical/yygx201603015
Chen Z B, Xiao W J, Ma D X, et al. Technical progress and analysis on large-scale spatial angle measurement[J]. Journal of Applied Optics, 2016, 37(3): 407–414. http://d.old.wanfangdata.com.cn/Periodical/yygx201603015
[4] 于冀平, 郭继平.动态角测量方法研究进展[J].中国测试, 2012, 38(3): 27–30. http://d.old.wanfangdata.com.cn/Periodical/zgcsjs201203008
Yu J P, Guo J P. Research development of dynamic angle measurement methods[J]. China Measurement & Test, 2012, 38(3): 27–30. http://d.old.wanfangdata.com.cn/Periodical/zgcsjs201203008
[5] Xiao W J, Chen Z B, Ma D X, et al. Large-scale spatial angle measurement and the pointing error analysis[J]. Optoelectronics Letters, 2016, 12(3): 229–232. doi: 10.1007/s11801-016-6028-z
[6] Zhang G X, Yao J W, Qiu Z R, et al. Large-scale space angle measurement[J]. CIRP Annals, 2008, 57(1): 525–528. doi: 10.1016/j.cirp.2008.03.122
[7] Yang L H, Yang X Y, Zhu J G, et al. Novel method for spatial angle measurement based on rotating planar laser beams[J]. Chinese Journal of Mechanical Engineering, 2011, 23(6): 758–764.
[8] Wang Z Y, Wang Y Y, Cheng W, et al. A monocular vision system based on cooperative targets detection for aircraft pose measurement[J]. Journal of Physics: Conference Series, 2017, 887(1): 012029. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=IOP_9361217
[9] 杜俊峰, 张孟伟, 张晓明.光电经纬仪测角精度分析[J].应用光学, 2012, 33(3): 466–473. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yygx201203005
Du J F, Zhang M W, Zhang X M. Angle measurement accuracy of photoelectric theodolite[J]. Journal of Applied Optics, 2012, 33(3): 466–473. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yygx201203005
[10] 曹建安, 张乐平, 吴昊, 等.采用倾角传感器实现空间旋转角度测量的解析方法研究[J].西安交通大学学报, 2013, 47(10): 109–114. doi: 10.7652/xjtuxb201310019
Cao J A, Zhang L P, Wu H, et al. Analytical approach for measurement of spatial angle with inclination sensor[J]. Journal of Xi'an Jiaotong University, 2013, 47(10): 109–114. doi: 10.7652/xjtuxb201310019
[11] 胡文川, 裘祖荣, 张国雄.大尺寸空间异面直线夹角的检测[J].光学 精密工程, 2012, 20(7): 1427–1433. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201207003
Hu W C, Qiu Z R, Zhang G X. Measurement of large-scale space angle formed by non-uniplanar lines[J]. Optics and Precision Engineering, 2012, 20(7): 1427–1433. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201207003
[12] 江洁, 苗准, 张广军.点结构光动态姿态角测量系统[J].红外与激光工程, 2010, 39(3): 532–536. doi: 10.3969/j.issn.1007-2276.2010.03.032
Jiang J, Miao Z, Zhang G J. Dynamic altitude angle measurement system based on dot-structure light[J]. Infrared and Laser Engineering, 2010, 39(3): 532–536. doi: 10.3969/j.issn.1007-2276.2010.03.032
[13] 郭继平, 李阿蒙, 于冀平, 等.双目立体视觉动态角度测量方法[J].中国测试, 2015, 41(7): 21–23, 36.
Guo J P, Li A M, Yu J P, et al. Dynamic angle measurement method based on stereo vision[J]. China Measurement & Test, 2015, 41(7): 21–23, 36.
[14] 孙岩, 张征宇, 黄诗捷, 等.风洞试验中模型迎角视觉测量技术研究[J].航空学报, 2013, 34(1): 1–7. http://d.old.wanfangdata.com.cn/Periodical/hkxb201301001
Sun Y, Zhang Z Y, Huang S J, et al. Vision measurement technology research for model angle of attack in wind tunnel tests[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(1): 1–7. http://d.old.wanfangdata.com.cn/Periodical/hkxb201301001
[15] 关印, 王向军, 阴雷, 等.基于物体表面形貌的单相机视觉位姿测量方法[J].光电工程, 2018, 45(1): 170522. doi: 10.12086/oee.2018.170522
Guan Y, Wang X J, Yin L, et al. Monocular position and pose measurement method based on surface topography of object[J]. Opto-Electronic Engineering, 2018, 45(1): 170522. doi: 10.12086/oee.2018.170522
[16] 丁力平, 陈文亮, 卢鹄.面向大型飞机装配的组合式大尺寸测量系统[J].航空制造技术, 2013(13): 76–80. doi: 10.3969/j.issn.1671-833X.2013.13.014
Ding L P, Chen W L, Lu G. Combined large-scale measurement system for large aircraft assembly[J]. Aeronautical Manufacturing Technology, 2013(13): 76–80. doi: 10.3969/j.issn.1671-833X.2013.13.014
[17] 魏振忠, 孙文, 张广军, 等.激光跟踪视觉导引测量中靶标球球心定位方法[J].红外与激光工程, 2012, 41(4): 929–935. doi: 10.3969/j.issn.1007-2276.2012.04.019
Wei Z Z, Sun W, Zhang G J, et al. Method for finding the 3D center positions of the target reflectors in laser tracking measurement system based on vision guiding[J]. Infrared and Laser Engineering, 2012, 41(4): 929–935. doi: 10.3969/j.issn.1007-2276.2012.04.019
[18] 周富强, 张广军, 江洁, 等.现场双经纬仪三维坐标测量系统[J].机械工程学报, 2004, 40(1): 165–169. doi: 10.3321/j.issn:0577-6686.2004.01.033
Zhou F Q, Zhang G J, Jiang J, et al. Three-dimensional coordinate measuring system with bino-theodolites on site[J]. Chinese Journal of Mechanical Engineering, 2004, 40(1): 165–169. doi: 10.3321/j.issn:0577-6686.2004.01.033
[19] 任顺清, 陈海兵, 赵洪波.用经纬仪测量大尺寸三维导轨垂直度的方法[J].仪器仪表学报, 2012, 33(1): 188–193. doi: 10.3969/j.issn.0254-3087.2012.01.028
Ren S Q, Chen H B, Zhao H B. Perpendicularity measurement method of 3-D large guideway with theodolite[J]. Chinese Journal of Scientific Instrument, 2012, 33(1): 188–193. doi: 10.3969/j.issn.0254-3087.2012.01.028
[20] 林嘉睿, 邾继贵, 张皓琳, 等.激光跟踪仪测角误差的现场评价[J].仪器仪表学报, 2012, 33(2): 463–468. doi: 10.3969/j.issn.0254-3087.2012.02.032
Lin J R, Zhu J G, Zhang H L, et al. Field evaluation of laser tracker angle measurement error[J]. Chinese Journal of Scientific Instrument, 2012, 33(2): 463–468. doi: 10.3969/j.issn.0254-3087.2012.02.032
[21] 张滋黎, 朱涵, 周维虎.激光跟踪仪转镜倾斜误差的标定及修正[J].光学 精密工程, 2015, 23(5): 1205–1212. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201505001
Zhang Z L, Zhu J G, Zhou W H. Error calibration and correction of mirror tilt in laser trackers[J]. Optics and Precision Engineering, 2015, 23(5): 1205–1212. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201505001
[22] Henriques J F, Caseiro R, Martins P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583–596. doi: 10.1109/TPAMI.2014.2345390
-
 下载:
下载:

 点击扫一扫
点击扫一扫
图(8)
计量
- 文章访问数:
- PDF下载数:
- 施引文献: 0


